

tsure053
.pdfошибки.
Если бы ошибка была в а4, то синдром s=011. Схемная реализация кодеров и декодеров линейного блочного кода Хэмминга показана на рисунке 1.22.
|
|
|
Регистр |
|
|
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
|
|
b1 |
|
|
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
|
|
|
|
|
b3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a4 |
a3 |
a2 |
a1 |
|
Кодер (7,4) кода |
|
|
|||
выход |
b |
3 |
b2 |
b1 |
a4 |
a3 |
a2 |
a1 |
вход |
|
|
|
|
|
|
|
|
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
Код Хемминга |
|
|
|
|
|
|
|
|





 Выход
Выход
Дешифратор
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
|
|||||||
|
|
|
|
|
|
|
|
Декодер (7,4) кода
Рис.1.22.
Основной задачей при построении линейных блочных кодов как и любых других помехоустойчивых кодов является разработка правил формирования проверочных элементов. Напомним, что эти правила заключаются в том, чтобы в результате проверок на четность числа единиц в передаваемой кодовой комбинации можно было указать позиции (номера) искаженных элементов.
Последовательность кодовых комбинаций первичного m разрядного кода сообщения можно записать в виде матрицы
|
a11 |
a12 |
... |
a1m |
. |
A = |
... |
... |
... |
... |
|
|
a Np1 |
a Np2 |
... |
a Npm |
|
Чтобы не записывать все кодовые комбинации этой матрицы можно записать единичную матрицу размером m×m.
|
100 ... |
0 |
I = |
010 ... |
0 |
|
... ... ... |
|
|
000 ... |
1 |
а все кодовые комбинации матрицы А получить путем поэлементного сложения по модулю 2 строк единичной матрицы I во всех возможных сочетаниях. Общее число таких сложений
Np = C1m + C2m +... + Cmm = 2m −1.
51
Вообще Np = 2m и уменьшение на единицу связано с отсутствием комбинации 000…0.
Для задания избыточного кода необходимо построить образующую матрицу Mn,m, левая часть которой есть единичная матрица Im первичного кода, а правая Rr,m – матрица проверочных элементов. Размерность такой матрицы n×m.
|
|
10 ... |
0 |
b11 |
b12 |
... |
b1r |
. |
|
M n,m |
= |
01 ... |
0 |
b21 |
b22 |
... |
b2r |
||
|
|||||||||
... ... ... ... |
... ... ... |
|
|||||||
|
|
|
|||||||
|
|
00 ... |
1 |
bm1 |
bm2 |
... |
bmr |
|
|
Теперь на основе образующей матрицы М можно построить проверочную матрицу Н размерностью n×r, левая часть которой это транспонированная матрица проверочных элементов, а правая – единичная матрица
|
b11 |
b21 |
... |
bm1 |
10 ... |
0 |
|
Hn,r = |
b12 |
b22 |
... |
bm2 |
01 ... |
0 |
. |
... |
... ... ... |
... ... ... |
|
||||
|
b1r |
b2r |
... |
bmr |
00 ... |
1 |
|
|
a1 |
a 2 |
... |
a m |
b1b2 ... |
br |
|
Единицы в строках матрицы Н будут стоять на позициях элементов, участвующих в проверке на четность при формировании соответствующих bi (i = 1, 2, …, r). Таким образом, если задана образующая матрица М, то построив по ней проверочную матрицу, можно найти правила формирования проверочных групп элементов. Такой матричных подход удобен при построении линейных блочных кодов с большим числом разрядов m и r.
Циклические коды
Циклические коды – это разновидность линейных блочных кодов и предназначены они для обнаружения и исправления ошибок.
Любое m разрядное число можно представить в виде многочлена
F(x) = am-1xm-1 + am-2xm-2 + … + a1x1 + a0x0.
Здесь коэффициенты a1, a2, …, am-1 равны "0" или "1".
Для двоичных кодов это будет иметь вид
F(x) = am-12m-1 + am-22m-2 + … + a121 + a020.
Например, кодовую комбинацию 1111 можно записать
F1 = x3 + x2 + x + 1,
а для 1001
F2 = x3 + 1.
52
Такое представление двоичных чисел более компактно. Над многочленами можно производить любые алгебраические операции (умножение, деление и т.д.) за исключением сложения и вычитания, которые заменяются на суммирование по модулю два.
F1(x) F2(t) = x2 + x.
В основе построения циклических кодов лежит представление их в виде указанных многочленов. Широкое применение таких кодов обусловлено их способностью обнаруживать и исправлять ошибки различной конфигурации, удобством математического аппарата для их описания и простотой технической реализации кодеров и декодеров.
Построение циклических кодов основано на представлении первичного кода в виде многочлена степени m-1 f(x) и представления в виде многочлена степени r-1 r(x) проверочного кода. Тогда многочлен циклического кода равен
F(x) = f(x)xr + r(x).
Умножение f(x) на xr необходимо, чтобы сдвинуть информационные элементы на r разрядов влево и тем самым освободить справа r разрядов для записи r проверочных элементов.
Построенный таким образом многочлен F(x) должен делиться без ос-
татка на образующий многочлен M(x) степени r, т.е. |
|||||||||
|
F(x) |
|
= |
f (x)x r + r(x) |
= Q(x), |
||||
|
M(x) |
|
|
||||||
|
|
|
M(x) |
|
|
|
|||
или с учетом правил двоичной алгебры |
r(x) |
||||||||
|
|
f (x)x r |
|||||||
|
|
|
= Q(x)+ |
|
. |
||||
|
|
M(x) |
M(x) |
||||||
Отсюда видно, что многочлен проверочных элементов r(x) является остатком от деления f(x)xr на М(х). Так как максимальная степень остатка всегда по крайней мере на единицу меньше степени делителя, становится ясно, почему степень образующего многочлена выбирается равной r.
Пример: пусть задана m=5 пятиэлементная комбинация первичного кода 10000 = f(x) = x4. Требуется построить циклический код, имея в виду возможность исправления однократных ошибок (т.е. d0=3). Этому условию удовлетворяет r=4. Возьмем в качестве образующего многочлена М(х)=х4+х+1 и раз-
делим f (x)* xr = x8 =100000000 на M (x) = x4 + x +1
53

Тогда циклический код F(x)=f(x)xr+r(x)=100000101.
При приеме комбинации циклического кода f(x) ее принадлежность к разрешенной или запрещенной определяется отсутствием или наличием остатка от ее деления на образующий многочлен М(х). Для исправления ошибок нужно, чтобы остатки от деления, т.е. r(x) служили синдромами ошибки. То есть каждому варианту ошибки должен соответствовать свой остаток. Для этого необходимо правильно выбрать образующий многочлен М(х). Обычно в качестве М(х) выбирают неприводимые многочлены, которые могут быть представлены в виде произведения многочленов низших степеней. Пример таких многочленов показан в таблице 1.2.
|
Таблица 1.2. |
r |
Неприводимые многочлены |
1 |
х + 1 |
2 |
х2 + х + 1 |
3 |
х3 +х + 1 |
|
х3 +х2 + 1 |
4 |
х4 +х + 1 |
|
х4 +х3 + 1 |
|
х4 +х3 + х2 +х + 1 |
Однако не всегда неприводимый многочлен сможет служить в качестве образующего многочлена. Это можно продемонстрировать на примере.
Рассмотрим пример построения циклического кода (9,5) для комбинации первичного кода х4=10000=f(x). Число проверочных элементов r=4 при d0=3. Следовательно образующий многочлен М(х) имеет степень r=4. Для r=4 из таблицы имеются три неприводимых многочлена. Построим для каждого из них циклический код.
54
F(x) = f(x) xr + r(x) = 100000101 – циклический код.
F(x) = 100001110.
F(x) = 100001000.
Как видно для примера 1 вес кодовой комбинации V1 = 3 = d0, для 2 – V2 = 4 > d0, а для 3 – V3 = 2 < d0. Это значит, что третий неприводимый многочлен М3(х) не может быть использован в качестве образующего для циклического кода, исправляющего одиночные ошибки (d0=3).
Кодеры и декодеры циклических кодов
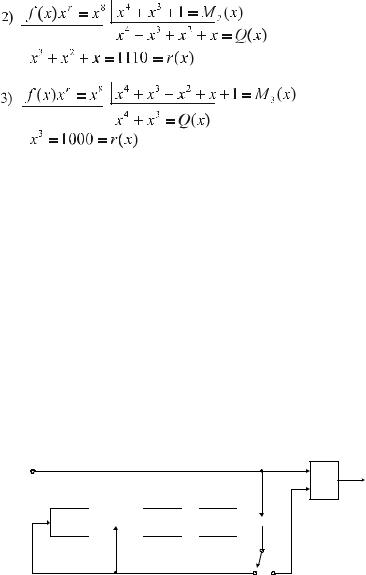
Для построения кодирующего устройства циклического кода необходимо иметь схему, вычисляющую остаток r(x) от деления f(x)xr на образующий многочлен М(х). Такую схему легко получить на регистре сдвига с обратными связями и сумматорах по модулю два. Деление f(x)xr на М(х) сводится к сложению по модулю два числа, соответствующего многочлену делителя, т.е. М(х), сначала со старшими разрядами делимого, т.е. f(x)xr, а затем с промежуточными остатками. Это может быть сделано на основе регистра сдвига, число ячеек которого равно степени образующего многочлена М(х), а в цепях обратных связей стоят сумматоры по модулю два, число и место которых определяется ненулевыми коэффициентами образующего многочлена М(х). Например: кодирующее устройство (7,4) кода по образующему многочлену (r=3) М(х) = х3 + х + 1 имеет вид, показанный на рисунке 1.23.
Вход 0001
1 Выход
0 

 1
1 
 2
2 
Кодер циклического |
1 2 |
кода (7,4) |
|
Рис.1.23.
55

Правила заполнения ячеек регистра: если на входе ячейки стоит сумматор по модулю два (ячейки 0 и 1), результат записывается как сумма по модулю два сигнала из соседней ячейки (предшествующей) и сигнала обратной связи в данном такте. Пусть f(x) = х3 = 1000. Этот сигнал последовательно старшими разрядами поступает в ячейки регистра и одновременно появляется на выходе через схему ИЛИ (ключ в положении 1). В результате за первые m=4 тактов на выходе появится f(x), а в регистре сформируется остаток r(x) от деления f(x)xr на М(х). Тогда ключ переводится в положение 2 и на выходе появляется остаток r(x). То есть за m+r тактов на выходе формируется циклический код F(x) первичного кода f(x), как показано в таблице 1.3.
Таблица 1.3.
№ такта |
f(x) |
Символ в ячейке |
Положение ключа |
|
Выход |
|
|
1 |
1 |
1 |
1 |
0 |
|
1 |
1 |
2 |
0 |
0 |
1 |
1 |
|
1 |
0 |
3 |
0 |
1 |
1 |
1 |
|
1 |
0 |
4 |
0 |
1 |
0 |
1 |
|
1 |
0 |
5 |
- |
0 |
1 |
0 |
|
2 |
1 |
6 |
- |
0 |
0 |
1 |
|
2 |
0 |
7 |
- |
0 |
0 |
0 |
|
2 |
1 |
Декодер циклического кода (7,4) показан на рисунке 1.24.
Вход
7 6 5 4 3 2 1

 0
0 

 1
1 
 2
2 
 Выход
Выход
Дешифратор
7 6 5 4 3 2 1
Декодер циклического кода
(7,4) кода
Рис.1.24.
Здесь код тоже подается старшими разрядами вперед, F(x) – циклический код, делится на образующий многочлен.
56
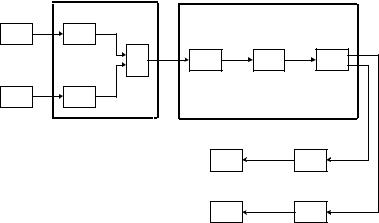
Это схема декодера для циклического кода (7,4) с образующим многочленом М(х) = х3 + х + 1 (как и для кодера, рассмотренного выше). Остаток r(x)
– это синдром ошибки, дешифратор настроен на исправление ошибки при каждом виде синдрома как и в ранее рассмотренном коде Хэмминга.
Наряду с рассмотренными выше в последнее время получили практическое применение сверточные коды и целый ряд других типов кодов. С ними вы можете при необходимости познакомиться в книге Р. Блейхута "Теория и практика кодов, контролирующих ошибки". –М.: "Мир", 1986 г.
1.7 Многоканальные системы передачи информации. Уплотнение информации в аналоговых системах связи. Частотное разделение сигналов. Временное разделение сигналов. Разделение сигналов по форме. Комбинационное разделение сигналов. Цифровые системы многоканальной передачи информации
Практика построения современных систем передачи информации показывает, что наиболее дорогостоящими звеньями каналов связи являются линии связи: кабельные, волноводные и световодные, радиорелейные и спутниковые и др. Поскольку экономически нецелесообразно использовать дорогостоящую линию связи для передачи информации между единственной парой абонентов, то возникает проблема построения многоканальных систем передачи, в которых одна общая линия связи уплотнятся большим числом индивидуальных каналов. Этим обеспечивается повышение эффективности использования пропускной способности линии связи. Структура линейной многоканальной системы связи показана на рисунке 1.25.
ИС1 |
A1(t) |
M1 |
U1(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Z(t) |
||
. |
|
. |
|
U(t) |
|
Uл(t) |
|
Zл(t) |
|
. |
|
. |
∑ |
M |
ЛС |
П |
|||
. |
|
. |
|
|
|
|
|
|
|
ИС |
An(t) |
MN |
UN(t) |
|
|
Групповой канал |
|
||
N |
|
|
Аппаратура |
|
|
|
|||
|
|
|
уплотнения |
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
Z1(t) |
|
|
|
|
|
|
ПС1 |
A1(t) |
П1 |
|
|
|
|
|
|
|
. |
|
. |
|
|
|
|
|
|
|
. |
|
. |
|
|
|
|
|
|
|
. |
AN~(t) |
. |
ZN(t) |
|
|
|
|
|
|
ПСN |
ПN |
||
|
|
|
|
|
|
|
|
||
Рис.1.25.
57
Сообщения А1(t), …, АN(t) от N источников ИС1, …, ИСN с помощью индивидуальных модуляторов М1, …, МN преобразуются в канальные сигналы U1(t), …, UN(t). Сумма этих сигналов образует групповой канальный сигнал UЛ(t), который передается по линии связи (ЛС). Групповой приемник П преобразует полученный сигнал ZЛ(t) в исходный групповой сигнал Z(t)=U(t). Индивидуальные приемники П1, …, ПN выделяют из группового сигнала Z(t) соответствующие канальные сигналы Z1(t), …, ZN(t) и преобразуют их в сообщения
~ |
~ |
A1 |
(t),..., AN (t). Блоки М1, …, МN и сумматор образуют аппаратуру уплотне- |
ния, блоки М, ЛС и П – групповой канал. Аппаратура уплотнения, групповой канал и индивидуальные приемники образуют систему многоканальной связи.
Чтобы разделяющие устройства могли различать сигналы отдельных каналов, должны быть определены соответствующие признаки, присущие только данному сигналу. Такими признаками в случае непрерывной модуляции могут быть частота, амплитуда, фаза, в случае дискретной модуляции еще и форма сигнала. В соответствии с используемыми для разделения признаками различаются и способы разделения: частотные, временные, фазовые и др.
Рассмотрим некоторые из них более подробно.
Уплотнение с частотным разделением сигналов.
Структура системы с частотным разделением сигналов показана на рисунке 1.26.
|
Генераторы |
|
|
|
|
|
|
|
|
||
|
поднесущих |
|
|
|
|
|
|
|
|
||
|
частот |
|
|
|
|
|
|
|
~ |
||
|
|
|
|
|
|
|
|
|
A1(t) |
||
ИС1 |
A1(t) |
Ф1 |
|
|
|
|
Ф1 |
Д1 |
|
ПС1 |
|
M1 |
|
|
|
|
|
. |
|
|
|||
. |
. |
|
|
|
|
|
. |
|
. |
||
. |
|
|
|
|
. |
|
|||||
. |
∑ |
M |
ЛС |
П |
. |
|
|||||
. |
. |
. |
|
. |
|||||||
. |
. |
~ |
|||||||||
. |
. |
|
|
|
|
|
(t) . |
||||
|
|
|
|
|
|
|
A |
||||
|
|
|
|
|
|
|
|
|
|
N |
|
ИСN |
AN(t) |
ФN |
|
|
|
|
ФN |
ДN |
|
ПСN |
|
MN |
|
|
|
|
|
||||||
|
|
|
|
Генератор |
|
|
|
|
|
|
|
|
|
|
|
несущей |
|
|
|
|
|
|
|
|
|
|
|
частоты |
|
|
|
|
|
|
|
Рис. 1.26.
Первичные индивидуальные сообщения А1(t), …, АN(t) модулируют поднесущие частоты ω1, …, ωN в модуляторах М1, …, МN. Эти модулированные сигналы поступают на входы частотных фильтров Ф1, …, ФN. На выходах Ф1, …, ФN формируются спектры канальных сигналов, которые занимают соответствующие полосы частот Δω1, …, ΔωN. Эти спектры суммируются и поступают
58
в групповой модулятора М, который переносит суммарный спектр группового канального сигнала в область частот, отведенных для передачи данной группы каналов.
На приемном конце в демодуляторе П спектр полученного сигнала преобразуется в спектр переданного сигнала, который затем в фильтрах Ф1, …, ФN делится на полосы Δω1, …, ΔωN соответствующие отдельным каналам. Демодуляторы Д1, …, ДN преобразуют выделенные сигналы в исходные сообщения
~ ~
A 1(t), …, AN (t).
Для приемлемой работы такой схемы необходимо иметь частотные фильтры, каждый из которых должен пропускать без ослабления только соответствующие им полосы частот Δω1, …, ΔωN, в которых сосредоточена основная часть энергии передаваемых сигналов. Так как спектры реальных сигналов содержат 80-90% энергии, то происходит взаимное наложение энергетических спектров, приводящее к переходным помехам. На практике это обстоятельство учитывается за счет введения защитных частотных интервалов между полосами частот соседних каналов. Это приводит к тому, что лишь около 80% полосы пропускания линии связи используется для передачи информации.
Например, телефонный канал связи или канал тональной частоты (ТЧ) занимает диапазон 300-3400 Гц. С учетом защитных частотных интервалов для канала ТЧ выбирается полоса частот 4 кГц. Исторически первой была реализована 12 канальная система в полосе частот от 60 до 108 Кгц (108 – 60 = 48 / 4 = 12). Если необходимо организовать систему с большим числом каналов, то в основу берется эта 12 канальная система и с ней обращаются как с одним телефонным каналом. Так, если надо организовать систему с 60 каналами методом частотного разделения, то укладывают 5 двенадцатиканальных систем в полосе частот от 312 до 552 Кгц (552 – 312 = 240 Кгц, 240 / 4 = 60). Если теперь взять 5 частотных диапазонов по 240 Кгц и уложить их рядом, получим систему на 300 каналов с частотным разделением. При этом каждый блок каналов можно для разных служб использовать либо целиком как один канал, либо как множество каналов. Так, блок 240 Кгц (60 телефонных каналов) можно целиком использовать для факсимильной передачи газетных сообщений, для которой требуется полоса 170 Кгц . Если взять 5 блоков по 1200 Кгц и два по 240 Кгц и уложить их рядом, то получим полосу частот около 6,5 МГц, пригодную для передачи телевизионных сигналов. Правда, при этом мы должны будем исключить 5 300 + 2 60 = 1620 телефонных каналов.
Временное разделение каналов
Временное разделение каналов используется для передачи аналоговых и дискретных сообщений, однако при этом требуется использовать методы импульсной модуляции.
Схема системы передачи сообщений с временным разделением сигна-
59

лов показана на рисунке 1.27.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|||
|
|
|
A1(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1(t) |
|
|
||||
|
ИС |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИД1 |
|
|
|
ПС1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
. |
|
|
|
|
K1 |
|
|
|
ИМ |
|
|
|
ЛС |
|
|
K2 |
|
. |
|
|
|
. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
. |
||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
. |
|||
|
ИСN |
AN(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AN(t) |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИДN |
|
|
|
ПСN |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ГТИ
Рис.1.27.
Коммутатор передатчика К1 поочередно в каждом такте времени подключает сигналы ИC1, …, ИCN к линии связи. На приемном конце коммутатор приемника К2 синхронно с К1 подключает соответствующие импульсные детекторы ИD1, …, ИDN. Пример временного разделения двух сигналов показан на рисунке 1.28.
Рис.1.28.
Системы с временным разделением просты, надежны, имеют малые габариты и массу, позволяют использовать стандартную элементную базу (БИС) для реализации. Недостаток – требуется синхронная работа К1 и К2, и если они разнесены на большое расстояние, то это трудно обеспечить.
В этих системах из-за не идеальности характеристик аппаратуры также могут возникать взаимные помехи (наложения импульсов). Для их устранения вводят защитные временные интервалы между импульсами.
Поясним смысл принципа временного разделения каналов на примере телефонного канала. Этот канал занимает полосу частот 4000 Гц. Если преобразовать непрерывный речевой сигнал в дискретный методом импульсно-кодовой
60