

2.3.2. Итерационные методы
В итерационных
методах предполагается осуществление
трех следующих этапов: построение для
вычисления последовательных приближений
итерационного процесса, сходящегося
к точному решению (т. е. построение
последовательности векторов
![]() сходящейся к точному решению
сходящейся к точному решению![]() ;
определение
критерия сходимости этого процесса,
позволяющего определить момент достижения
требуемой точности; исследование
скорости сходимости и оптимизации
итерационного процесса с целью уменьшения
числа операций, необходимых для достижения
требуемой точности.
;
определение
критерия сходимости этого процесса,
позволяющего определить момент достижения
требуемой точности; исследование
скорости сходимости и оптимизации
итерационного процесса с целью уменьшения
числа операций, необходимых для достижения
требуемой точности.
Итерационные методы позволяют получить решение с наперед заданной точностью, если доказана сходимость метода. Строго точного решения итерационные методы не дают, поскольку оно достигается как предел последовательности векторов. Прямой метод, вообще говоря, дает точное решение, но из-за ошибок округления, имеющих место на любых компьютерах, оно не может быть достигнуто, и a priori даже трудно оценить, насколько это решение отличается от точного. В связи с отмеченным итерационные методы иногда позволяют получить решение с большей точностью, чем прямые.
Рассмотрим несколько итерационных методов решения линейных уравнений.
Метод простой итерации
В методе простой итерации система (2.1) линейных алгебраических уравнений Ax = b приводится к эквивалентной системе вида
![]() .
(2.9)
.
(2.9)
Решение системы
(2.9) и, следовательно, решение исходной
системы (2.1) ищется как предел
последовательности векторов при
![]() :
:
![]() k
= 0, 1, 2,…, (2.10)
k
= 0, 1, 2,…, (2.10)
где
![]() - начальное приближение для вектора
решения.
- начальное приближение для вектора
решения.
Достаточное условие сходимости метода простой итерации определяется следующей теоремой.
ТЕОРЕМА 1. Если
какая-либо норма матрицы
![]() ,
согласованная с рассматриваемой нормой
вектора
,
согласованная с рассматриваемой нормой
вектора![]() ,
меньше единицы (
,
меньше единицы (![]() ),
то последовательность
),
то последовательность![]() в методе простой итерации сходится к
точному решению
в методе простой итерации сходится к
точному решению![]() системы
(2.9) со скоростью, не меньшей скорости
геометрической прогрессии со знаменателем
системы
(2.9) со скоростью, не меньшей скорости
геометрической прогрессии со знаменателем
![]() при любом начальном приближении
при любом начальном приближении![]() .
.
ДОКАЗАТЕЛЬСТВО.
Для доказательства теоремы введем
погрешность
![]() .
Вычитая из соотношения
.
Вычитая из соотношения![]() равенство (2.10),
получаем
равенство (2.10),
получаем
![]() .
Переходя к нормам, имеем
.
Переходя к нормам, имеем
![]()
Отметим, что
неравенство
![]() из предыдущего выражения является
условием согласованности нормы матрицы
и вектора. Если
из предыдущего выражения является
условием согласованности нормы матрицы
и вектора. Если
![]() ,
то при любом векторе начальной погрешности
(или иначе – при любом начальном векторе
,
то при любом векторе начальной погрешности
(или иначе – при любом начальном векторе
![]() )
норма погрешности
)
норма погрешности![]() стремится к нулю не медленнее геометрической
прогрессии со знаменателем
стремится к нулю не медленнее геометрической
прогрессии со знаменателем![]() .
.
Если в качестве
нормы матрицы выбрать норму
![]() или
или![]() то для решения вопроса о сходимости
метода простой итерации можно
воспользоваться следствием из теоремы
1: метод простой итерации сходится, если
для матрицы
то для решения вопроса о сходимости
метода простой итерации можно
воспользоваться следствием из теоремы
1: метод простой итерации сходится, если
для матрицы![]() выполняется одно из следующих условий:
выполняется одно из следующих условий:
![]() ,
i
=1,2, …, n,
,
i
=1,2, …, n,
![]() ,
j
= 1, 2, …, n. (2.11)
,
j
= 1, 2, …, n. (2.11)
Простейшим и распространенным способом приведения системы Ax= b к виду (2.9), удобному для итераций, является выделение диагональных элементов, при этом каждое i-е уравнение разрешается относительно i-го неизвестного:
 ,
i
= 1, 2, …, n,
(2.12)
,
i
= 1, 2, …, n,
(2.12)
и метод простой итерации запишется в виде

Матрица
![]() при этом имеет вид
при этом имеет вид
 .
.
Элемент этой
матрицы можно записать в виде
![]() где
где![]() - символ Кронекера. В этом случае
достаточное условие сходимости метода
простой итерации может быть сформулировано
как условие преобладания диагональных
элементов матрицыА,
что следует из (2.11) и записи матрицы
- символ Кронекера. В этом случае
достаточное условие сходимости метода
простой итерации может быть сформулировано
как условие преобладания диагональных
элементов матрицыА,
что следует из (2.11) и записи матрицы
![]() ,
т. е.
,
т. е.
![]() i
= 1, 2, …, n.
i
= 1, 2, …, n.
Еще раз подчеркнем,
что рассмотренные формы условия
сходимости метода итерации являются
лишь достаточными. Их выполнение
гарантирует сходимость метода, но их
невыполнение в общем случае не означает,
что метод простой итерации расходится.
Необходимым и достаточным условием
сходимости метода простой итерации
является условие того, что целая часть
![]() (где
(где![]() -максимальное
по модулю собственное значение матрицыА);
это условие редко используется в практике
вычислений.
-максимальное
по модулю собственное значение матрицыА);
это условие редко используется в практике
вычислений.
Перейдем к вопросу
об оценке погрешности решения. Представляют
интерес два соотношения оценки погрешности
решения
![]() :
первое связывает норму погрешности с
нормой разности двух последовательных
приближений
:
первое связывает норму погрешности с
нормой разности двух последовательных
приближений![]() и может быть использовано для оценки
погрешности только в процессе вычислений;
второе связывает норму погрешности с
нормами вектора начального приближения
и может быть использовано для оценки
погрешности только в процессе вычислений;
второе связывает норму погрешности с
нормами вектора начального приближения![]() и вектора свободного члена
и вектора свободного члена![]() в системе (2.9). Необходимые соотношения
даются следующими двумя теоремами.
в системе (2.9). Необходимые соотношения
даются следующими двумя теоремами.
ТЕОРЕМА 2. Если
какая-либо норма матрицы
![]() ,
согласованная с рассматриваемой нормой
векторах,
меньше единицы (
,
согласованная с рассматриваемой нормой
векторах,
меньше единицы (![]() ),
то имеет место следующая оценка
погрешности:
),
то имеет место следующая оценка
погрешности:
![]() . (2.13)
. (2.13)
ДОКАЗАТЕЛЬСТВО.
Вычтем из равенства
![]() равенство (2.10):
равенство (2.10):
![]()
Вычитая из обеих
частей значение приближения
![]() ,
преобразуем это соотношение к виду
,
преобразуем это соотношение к виду
![]()
Перейдя к нормам, получим
![]()
или
![]()
Так как по условию
теоремы
![]() ,
то
,
то
![]()
Используя соотношение
![]() из которого следует, что
из которого следует, что![]() окончательно получим:
окончательно получим:
ТЕОРЕМА 3. Если
какая-либо норма матрица
![]() ,
согласованная с рассматриваемой нормой
векторах,
меньше единицы (
,
согласованная с рассматриваемой нормой
векторах,
меньше единицы (![]() ),
то имеет место следующая оценка
погрешности:
),
то имеет место следующая оценка
погрешности:

Сделаем два замечания. Во-первых, соотношение (2.13) может быть записано в виде
![]()
позволяющем
получить оценку погрешности по результатам
двух первых итераций. Во-первых, при
использовании метода итераций в качестве
оценки погрешности вычислений иногда
рекомендуется использовать норму
разности двух последовательных
приближений. Из соотношений для
погрешности следует, что в общем случае
это неверно. Если норма
![]() близка к единице, то коэффициент при
близка к единице, то коэффициент при![]() может быть достаточно большим.
может быть достаточно большим.
Погрешности последовательных итераций связаны соотношением
![]()
т.е. погрешность
изменяется на шаге линейно. Говорят,
что метод имеет линейную
сходимость или
первый порядок сходимости. Вместе с тем
количество итераций, необходимое для
достижения требуемой точности, зависит
от значения
![]() и начального приближения
и начального приближения![]() .
.
Итак, на примере метода простой итерации продемонстрированы три этапа итерационных методов: построение последовательности векторов, порождаемой формулой (1.10); определение условия сходимости по теореме 1 и оценка скорости сходимости с помощью теорем 2 и 3.
Метод Зейделя
В методе простой
итерации не используется кажущаяся
очевидной возможность улучшения
сходимости итерационного процесса –
немедленное введение в расчет вновь
вычисленных компонент вектора
![]() .
Эта возможность используется в
итерационном методе Зейделя. Итерационный
процесс для системы (2.9) выполняется при
этом по соотношению
.
Эта возможность используется в
итерационном методе Зейделя. Итерационный
процесс для системы (2.9) выполняется при
этом по соотношению
![]() i
= 1, 2, …, n
(2.14)
i
= 1, 2, …, n
(2.14)
или для системы (1.1)
![]()
![]()
Не вдаваясь в подробности, отметим, что метод итераций Зейделя часто действительно приводит к более быстрой сходимости, чем метод простой итерации. Однако возможны случаи, когда метод итераций Зейделя сходится медленнее метода простой итерации, и даже случаи, когда метод простой итерации сходится, а метод итераций Зейделя расходится.
Отметим, что метод Зейделя сходится, если матрица А положительно определенная и симметричная.
Покажем, что метод
итераций Зейделя эквивалентен некоторому
методу простой итерации со специальным
образом построенной матрицей
![]() и вектором
и вектором![]() в соотношении (2.10). Для этого запишем
систему (2.14) в виде
в соотношении (2.10). Для этого запишем
систему (2.14) в виде![]() гдеF-верхняя
треугольная матрица из коэффициентов
матрицы
гдеF-верхняя
треугольная матрица из коэффициентов
матрицы
![]() ,
а
,
а![]() Перепишем систему в виде
Перепишем систему в виде![]() гдеE-единичная
матрица. Матрица (Е-Н)
- нижняя
треугольная матрица с диагональными
элементами, равными единице. Следовательно,
определитель этой матрицы отличен от
нуля (равен единице) и она имеет обратную
матрицу
гдеE-единичная
матрица. Матрица (Е-Н)
- нижняя
треугольная матрица с диагональными
элементами, равными единице. Следовательно,
определитель этой матрицы отличен от
нуля (равен единице) и она имеет обратную
матрицу
![]() .
Тогда
.
Тогда
![]()
Сопоставляя это
соотношение с решением (2.10), можем
заключить, что действительно метод
итераций Зейделя эквивалентен методу
простой итерации в том смысле, что для
установления условия и критерия
сходимости метода итераций Зейделя
можно воспользоваться теоремами,
приведенными для метода простой итерации,
если положить
![]() Итерационный процесс для системы (2.12)
записывают и в более общей форме, а
именно
Итерационный процесс для системы (2.12)
записывают и в более общей форме, а
именно

Вводя в итерационный
процесс для
![]() значение
значение![]() ,
которое отсутствует в методе простой
итерации и методе Зейделя.
,
которое отсутствует в методе простой
итерации и методе Зейделя.
Итерационный процесс при w > 1 называют МЕТОДОМ ВЕРХНЕЙ РЕЛАКСАЦИИ, при w = 1 (метод Зейделя)-методом ПОЛНОЙ РЕЛАКСАЦИИ и при w < 1 - методом НИЖНЕЙ РЕЛАКСАЦИИ.
В простом случае
при специально выбранном w
можно дать оценку числа операций N,
необходимых для достижения заданной
точности
![]() .
В методе простой итерации
.
В методе простой итерации![]() методе Зейделя
методе Зейделя![]() методе верхней релаксации
методе верхней релаксации![]() Очевидно, что число итераций тем больше,
чем больше порядок системы; при этом
имеет место квадратичная зависимость
в первых двух методах и линейная
зависимость в методе верхней релаксации.
Очевидно также, что число итераций тем
больше, чем меньше
Очевидно, что число итераций тем больше,
чем больше порядок системы; при этом
имеет место квадратичная зависимость
в первых двух методах и линейная
зависимость в методе верхней релаксации.
Очевидно также, что число итераций тем
больше, чем меньше![]() .
.
Представленные оценки не являются универсальными, и хотя в обсуждаемом случае самым медленным является метод простой итерации, а самым быстрым - метод верхней релаксации, это соотношение в других случаях может изменяться.
Можно дать наиболее общую запись итерационного процесса для системы (1.1). Имеем
![]() (2.15)
(2.15)
где
![]() - некоторая матрица, выбираемая для
обеспечения быстрой сходимости метода.
Во многом она определяется конкретной
системой (2.1) и искусством вычислителя.
Говорят, что итерационный процесс
стационарный, если
- некоторая матрица, выбираемая для
обеспечения быстрой сходимости метода.
Во многом она определяется конкретной
системой (2.1) и искусством вычислителя.
Говорят, что итерационный процесс
стационарный, если![]() и
и![]() не зависят отk;
в дальнейшем индекс k
при B
и
не зависят отk;
в дальнейшем индекс k
при B
и
![]() опускается. Из (2.15) очевидно, что если
итерационный процесс сходится, т. е.
опускается. Из (2.15) очевидно, что если
итерационный процесс сходится, т. е.![]() то он сходится к решению системы (2.1).
то он сходится к решению системы (2.1).
Пусть матрицы D и L определены следующим образом:
 ,
,
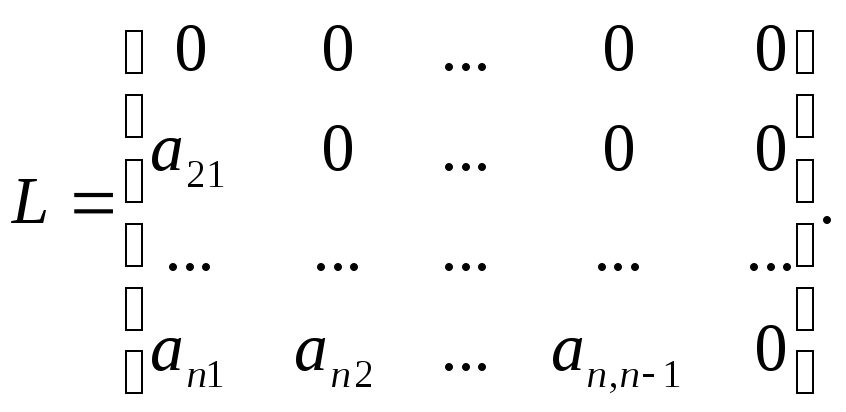
Тогда метод простой
итерации есть частный случай процесса(2.15)
при B
= D
и
![]() метод Зейделя – частный случай приB
= D
+ L,
метод Зейделя – частный случай приB
= D
+ L,
![]() а метод
релаксации – частный случай при B
= D
+ wL,
а метод
релаксации – частный случай при B
= D
+ wL,
![]()
Матрицу
![]() следует выбирать как можно ближе к
матрице А, но так, чтобы обращение этой
матрицы было более простой задачей(матрица
В – треугольная, трехдиагональная и т.
д.).
следует выбирать как можно ближе к
матрице А, но так, чтобы обращение этой
матрицы было более простой задачей(матрица
В – треугольная, трехдиагональная и т.
д.).
Лекция № 6
3. РЕШЕНИЕ НЕЛИНЕЙНЫХ УРАВНЕНИЙ И СИСТЕМ