

8. Расчёт статических характеристик
8.1 Общие положения
Целью данного расчета является обеспечение технологических задач, заложенных в требования к электроприводу. Технологические скорости рабочего и обратного хода в установившемся режиме, пониженные скорости при пуске и остановке рабочего органа должны быть обеспечены с высокой степенью точности.
Заданными данными
для расчета являются скорость движения
механизма ![]() ,
приведенная к валу двигателя, и заданный
момент сопротивления движению Мс,
приведенный к валу двигателя и включающий
в себя момент механических потерь
холостого хода двигателя ΔMх.
,
приведенная к валу двигателя, и заданный
момент сопротивления движению Мс,
приведенный к валу двигателя и включающий
в себя момент механических потерь
холостого хода двигателя ΔMх.
Задачей расчета является определение напряжения и частоты, добавочных сопротивлений силовых цепей и цепей возбуждения, при которых выполняются требования к электроприводу по обеспечению заданных скоростей движения рабочего органа (рабочей машины)
Исходными данными для расчета статических характеристик являются ка-таложные данные электродвигателя и другого оборудования, установленного в его силовой цепи.
8.2 Расчет естественных характеристик двигателя
В программе MatLab построим естественные механические и электромеханические характеристики по Т-образной схеме, используя данные Таблицы 3 и Таблицы 7:
Таблица 7.
Данные для построения естественных характеристик
|
I1n |
Un |
r1 |
r2p |
x1 |
x2p |
wn |
won |
Mn |
Imn |
|
12.4 |
220 |
1.6386 |
2.0634 |
1.2877 |
1.2877 |
96.335 |
104.72 |
46.712 |
8.3463 |
Естественная механическая и электромеханическая характеристики представлены на Рисунке 3

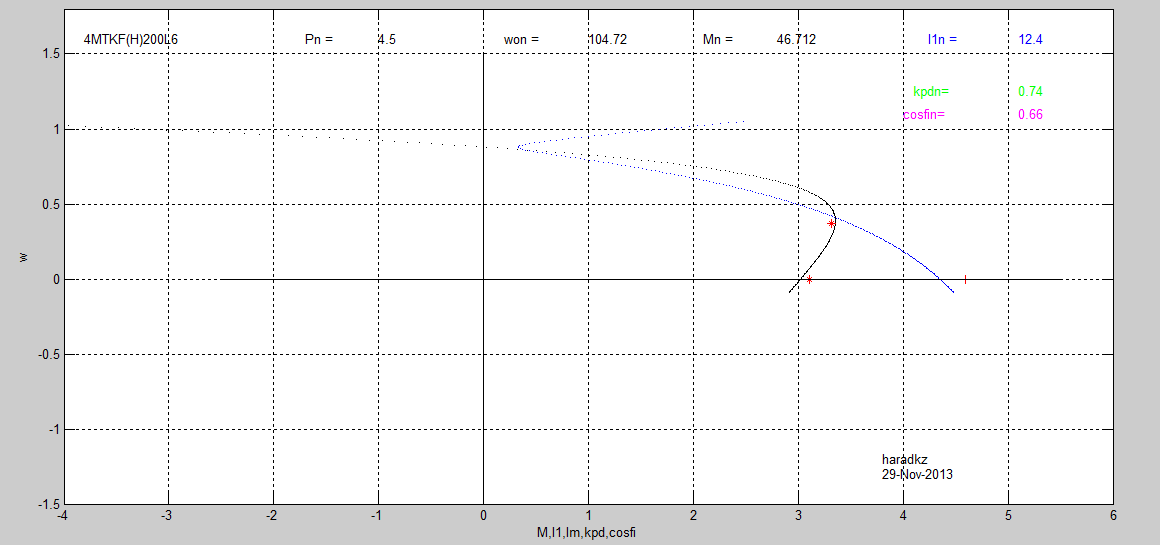
Рисунок 3. Естественная механическая и электромеханическая характеристики
8.3. Расчёт характеристик, проходящих через заданную точку
Построим механические и электромеханические характеристики, проходящие через заданные точки:
1) При движении с заготовкой Мс=20.47 Нм, ωс= 80 рад/c
1) При движении без заготовки Мс=4.323 Нм, ωс=120 рад/c
Характеристики построены на Рисунке 4 и Рисунке 5

Рисунок 4. Механическая и электромеханическая характеристики с заданной точкой Мс=20.47 Нм, ωс= 80 рад/c


Рисунок 5. . Механическая и электромеханическая характеристики с заданной точкой Мс=4.323 Нм, ωс=120 рад/c
9. Расчет переходных процессов электропривода
9.1 Общие положения
Расчёт переходных режимов необходим:
1) для определения времени и характера их протекания;
2) для оценки их соответствия требованиям технологического процесса
рабочего органа;
3) для оценки механических и электрических перегрузок;
4) для правильного выбора мощности двигателей, преобразователей и
аппаратуры управления.
Переходные процессы электропривода возникают при изменении
управляющих и возмущающих воздействий.
На характер переходного процесса оказывают существенное влияние:
1) механическая инерция электропривода,
2) жесткость механической передачи,
3) электромагнитная инерция обмоток двигателя и элементов преобразователя.
Поставленные задачи решаются при выполнении:
– расчетов механических и электромеханических переходных процессов
момента M(t), скорости ω(t), скорости идеального холостого хода ωO(t), угла
поворота вала двигателя α(t) за время цикла;
– проверки на заданную производительность электропривода;
– проверки на перегрузочную способность двигателя и преобразователя;
– расчета среднеквадратичного значения тока (момента) за цикл и проверки
на нагрев двигателя, преобразователя и резисторов;
– расчетов энергетических показателей электропривода (механической
работы, активной и реактивной энергии из сети за цикл, циклового КПД и cosφ).
При расчёте переходных процессов можно идти 3 путями:
Использовать готовые аналитические выражения
Использование частотного анализа
Расчёт и использование структурной схемы электропривода
Первый путь не применим в данном случае, т.к.не
получается выполнить анализ влияния различных параметров электропривода на конечный результат.
Второй путь (анализ работы электропривода осуществляется с помощью ЛАЧХ) позволяет оценить только качество переходных процессов.
Поэтому был выбран третий способ – составление структурной схемы электропривода.