

6. Прочностной расчет элементов стойки подъемника
6.1. Расчет винта на устойчивость
Брус под воздействием центрально приложенных по его концам сжимающих сил деформируется, оставаясь прямым. Возникшие при этом внутренние напряжения уравновешивают внешние силы.
Для надежной эксплуатации бруса эта прямолинейная форма должна быть устойчивой в том смысле, что будучи нарушена каким-либо кратковременным внешним воздействием любого направления, она должна полностью восстановиться (брус, временно выйдя из прямолинейного состояния, вернется в него после совершения нескольких циклов затухающих колебаний).
Способность бруса устойчиво сохранять прямолинейную форму в равновесии зависит от величины сжимающих сил (нагрузок). При некотором достаточно большом значении нагрузок нарушенная толчком прямолинейная форма равновесия бруса окажется утраченной им навсегда (брус не вернется в прямолинейное положение). Это значение нагрузки, при котором исходная прямолинейная форма равновесия перестает быть устойчивой (т. е. происходит потеря устойчивости), называется критическим значением нагрузки. Если нагрузки достигнут критического уровня, то брус потеряет устойчивость и будет разрушен.
В качестве материалов винтов используют сталь марок 35, 45, 50, А45, А50 без термической обработки или марок У10, 65Г, 40Х, 40ХГ с термической обработкой. Для уменьшения износа гайки изготавливают из бронзы марок БрОФ10-1, БрОЦС6-6-3, БрАЖ9-4. При небольших нагрузках в качестве материала гаек используют антифрикционный чугун марок АЧВ-1, АЧС-3 и др.
Для дальнейших расчетов примем следующие величины:
- фактическая нагрузка P=13236 Н;
- высота подъема l=2000 мм;
- внутренний диаметр резьбы винта d=45 мм;
- материал винта – сталь 35;
- требуемый коэффициент запаса устойчивости [ny]=3,0;
- модуль продольной упругости материала Е=2,1·106 кг/см2;
- предельная гибкость λпред=90.
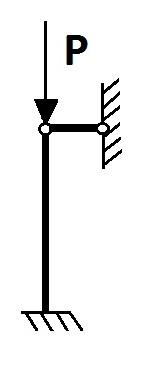
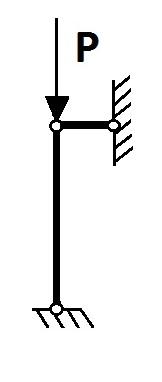
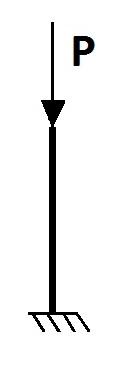
Таблица 6.1. Оценка устойчивости бруса в зависимости от способа закрепления
|
|
Вид | |||
|
Схема |
|
|
|
|
|
Коэффициент приведения |
0,5 |
0,7 |
1,0 |
2,0 |
|
Оценка устойчивости бруса |
Высокая |
Хорошая |
Нормальная |
Низкая |
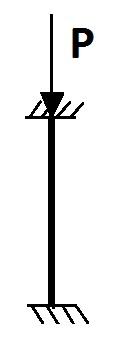
К винту в стойке нашего подъемника можно применить первый вариант из таблицы 6.1., так как винт закреплен с обоих концов. Поэтому µ принимаем равной 0,5.
Определяем гибкость винта
 ,
(6.1.)[4, стр.5]
,
(6.1.)[4, стр.5]
где iMIN – минимальный радиус сечения;
l – высота подъема;
Определяем минимальный радиус сечения
 ;
(6.2.)[4, стр. 5]
;
(6.2.)[4, стр. 5]
 ;
(6.1.)
;
(6.1.)
В связи с тем, что фактическая гибкость винта близка к предельной, то дальнейшие расчеты следует включить расчет критической силы по формуле Эйлера и определение фактического коэффициента запаса устойчивости.
Величина критической силы PK для винта вычисляем по формуле Эйлера
 ,
(6.3.)[4, стр. 5]
,
(6.3.)[4, стр. 5]
где Е – модуль продольной упругости материала бруса, Мпа;
Imin – минимальный момент инерции поперечного сечения бруса, м2;
l – длина бруса, м;
µ - коэффициент, учитывающий способ закрепления концов бруса (табл. 3).
 см4;
(6.4.)[4, стр. 5]
см4;
(6.4.)[4, стр. 5]
 (6.3.)
(6.3.)
По РК определяем фактический коэффициент запаса устойчивости и сравниваем его с требуемым:
 ;
(6.5.)[4, стр. 6]
;
(6.5.)[4, стр. 6]
Так как фактический коэффициент запаса устойчивости больше требуемого, то считаем условие устойчивости винта выполненным.
Рассчитаем критические напряжения по эмпирической зависимости Ясинского-Тетмайера
 ;
(6.6.)[4, стр.6]
;
(6.6.)[4, стр.6]
где a, b, c – опытные коэффициенты, зависящие от материала и имеющие размерность напряжения (кг/см2).
A=4640;
b=36,17;
c=0
 (6.6)
(6.6)
Фактическое напряжение сжатия
 ;
(6.7.)[4, стр. 6]
;
(6.7.)[4, стр. 6]
где P – фактическая нагрузка;
F – площадь поперечного сечения
 ;
(6.8.)[4,
стр. 6]
;
(6.8.)[4,
стр. 6]
 ≈84,9
кг/см2;
(6.9.)[4, стр. 6]
≈84,9
кг/см2;
(6.9.)[4, стр. 6]
Расчет на устойчивость с использованием коэффициента ϕ
 ;
(6.10.)[4, стр. 6]
;
(6.10.)[4, стр. 6]
где ϕ – коэффициент уменьшения основного допускаемого напряжения на сжатие, величина его зависит от гибкости стержня λ, в нашем случае ϕ=0,62
 (6.10.)
(6.10.)

Так как фактическое напряжение сжатия меньше критического, то условие устойчивости винта считаем выполненным.