

Формулы связи координат соответственных точек снимка и местности.

Рис.1.4.1
Пусть
из точки S
получен
снимок Р,
на котором точка М
местности изобразилась в точке m.
Найдем зависимости между координатами
этих точек. Положение точки М
местности в системе координат объекта
OXYZ
определяет вектор
 M
=
M
=
 .
Вектор
.
Вектор
 S
=
S
=
 определяет положение центра проекции
S
в системе координат объекта OXYZ.
определяет положение центра проекции
S
в системе координат объекта OXYZ.
Векторы
 =
=
 и
и
 =
=
 определяют соответственно положение
точек m
и М
относительно центра проекции S.
определяют соответственно положение
точек m
и М
относительно центра проекции S.
Из рис.1.4.1 следует, что
 ,
(1.4.1)
,
(1.4.1)
Векторы
 коллинеарные, поэтому можно записать,
что
коллинеарные, поэтому можно записать,
что
 , (1.4.2)
, (1.4.2)
где N-скалярная величина.
С учетом (1.4.2) выражение (1.4.1) имеет вид
 ,
(1.4.3)
,
(1.4.3)
В координатной форме выражение (1.4.3) имеет вид

или
 .
(1.4.4)
.
(1.4.4)
В
выражении 1.4.4 X,Y,Z
- координаты точки М
в системе координат объекта;
 координаты центра проекцииS
в системе координат объекта;
координаты центра проекцииS
в системе координат объекта;
 координаты вектораr
в системе координат объекта.
координаты вектораr
в системе координат объекта.
 ,
( 1.4.5)
,
( 1.4.5)
где А - матрица преобразования координат, элементы aij которой определяются по значениям угловых элементов внешнего ориентирования снимка ,,.
Из третьей формулы выражения 1.4.4 следует, что
 .
.
Подставив значение N в первые две формулы выражения (1.4.4) получим формулы связи координат соответственных точек местности и снимка

 ,
( 1.4.6)
,
( 1.4.6)
которые с учетом (1.3.5) имеют вид
 (1.4.7)
(1.4.7)
Из формул (1.4.6) следует, что координаты точки местности по снимку можно получить по координатам ее изображения на снимке, если известны элементы внутреннего и внешнего ориентирования снимков и высота Z этой точки.
Найдем формулы связи координат соответственных точек снимка и местности, которые позволят вычислить координаты изображения точки на снимке в системе координат снимка по координатам соответственной точки местности, определенным в системе координат объекта OXYZ.
Из выражения (1.4.3) следует, что
 (1.4.8)
(1.4.8)
В координатной форме выражение (1.4.8) имеет вид

или
 (1.4.9)
(1.4.9)
В
выражении (1.4.9) x*,
y*,
z*
–координаты вектора
 M
-
M
-
 S
в системе координат снимка Sxyz.
S
в системе координат снимка Sxyz.
 (1.4.10)
(1.4.10)
Из третьего выражения (1.4.9) следует, что

Подставив
значение
 в
первые два уравнения выражения (1.4.9),
получим формулы связи координат
соответственных точек снимка и местности
в
первые два уравнения выражения (1.4.9),
получим формулы связи координат
соответственных точек снимка и местности
 , (1.4.11)
, (1.4.11)
которые с учетом (1.4.10) имеют вид
 (1.4.12)
(1.4.12)
Формулы (1.4.12) в фотограмметрии часто называют уравнениями коллинеарности.
Формулы связи координат соответственных точек местности и горизонтального снимка.
У горизонтального снимка угловые элементы внешнего ориентирования ===0. Будем считать, что координаты главной точки снимка x0=y0=0.
В этом случае
 (1.5.1)
(1.5.1)
Формулы связи координат (1.4.6) и (1.4.12) при этом будут иметь вид
 (1.5.2)
(1.5.2)
 (1.5.3)
(1.5.3)
Если в качестве начала системы координат объекта OXYZ выбрать центр проекции S, то Xs=Ys=Zs=0, а формулы (1.5.2) и (1.5.3) примут вид
 (1.5.4)
(1.5.4)
 (1.5.5)
(1.5.5)
( H = -Z – высота фотографирования над определяемой точкой)
Из формул (1.5.4) и (1.5.5) следует, что горизонтальным снимком горизонтальной местности можно пользоваться как планом масштаба

Влияние погрешности определения высот точек местности на точность определения их плановых координат по одиночному снимку.
Рассмотрим влияние погрешностей определения высот точек на точность определения их плановых координат по одиночному снимку. На рис. 1.6.1 а и 1.6.1 б представлен в проекциях на координатные плоскости XZ и YZ снимок P, полученный из центра проекции S, на котором точка местности M0 изобразилась в точке m. Плоскость E – горизонтальная плоскость, проведенная через точку местности M0. Точки N и n – точки надира соответственно на местности и на снимке.
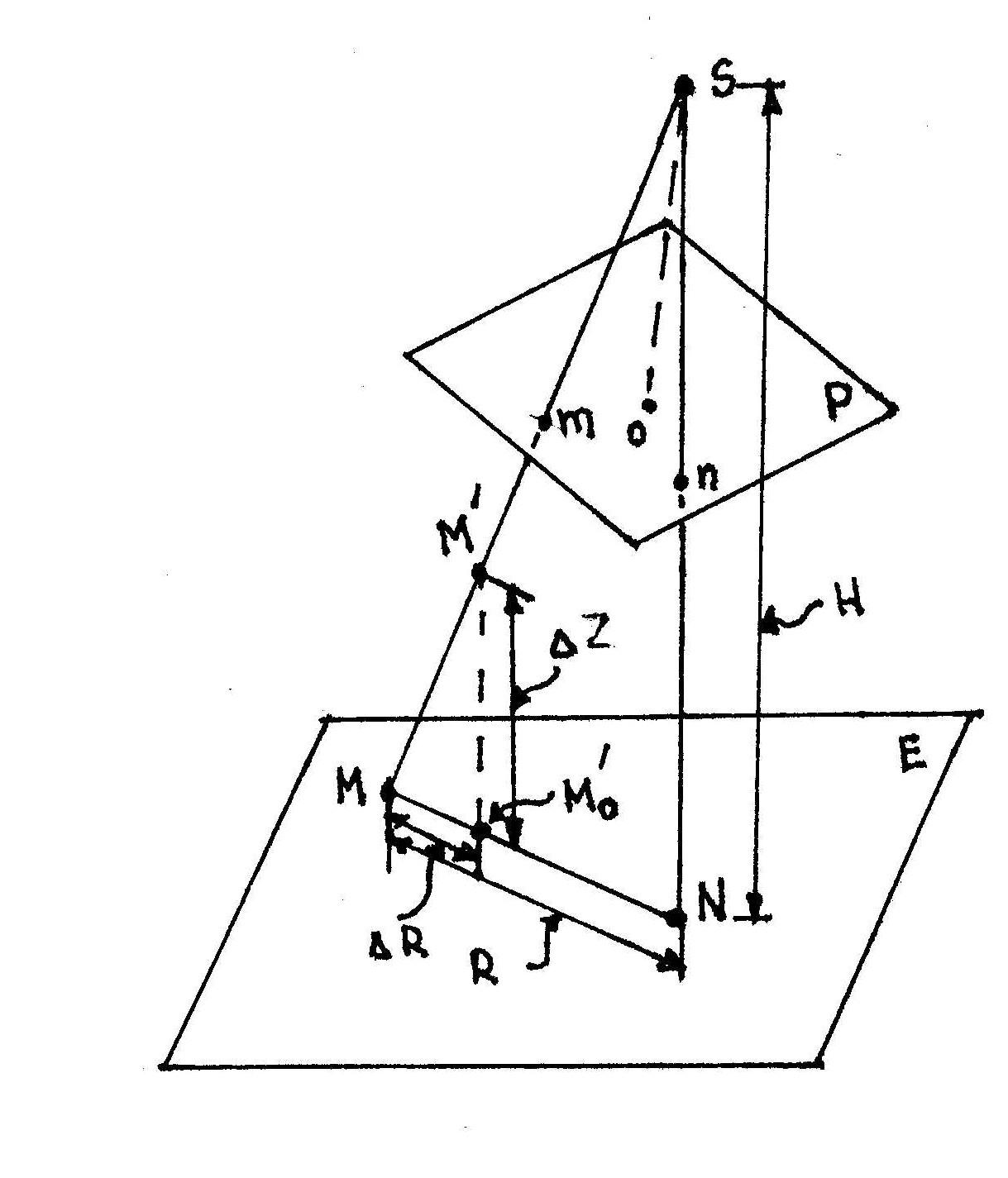
Рис. 1.6.1
Если высота точки М определена с погрешностью ΔZ , то положение точки М, определяется как точка пересечения проектирующего луча Sm и горизонтальной плоскости параллельной плоскости E и расположенной выше ее на величину ΔZ.