

Фотограмметрия Введение
Фотограмметрия - научно-техническая дисциплина, занимающаяся определением геометрических характеристик объектов, таких как форма, размеры, положение в пространстве и т.д., по их изображениям.
В настоящее время в фотограмметрии применяются не только аналоговые и цифровые фотоснимки, но и изображения, получаемые с помощью радиолокационных, лазерно-локационных, рентгеновских и других съемочных систем.
Наибольшее применение фотограмметрия находит в области картографии для создания карт различного назначения, а также других документов о местности по аэро, космическим и наземным снимкам, получаемых различными съемочными системами. Помимо картографирования Земли фотограмметрия применяется для создания карт и изучения поверхности планет, их спутников и других небесных тел.
Очень широко фотограмметрические методы используются для решения различных задач в архитектуре и строительстве, промышленности, криминалистике, медицине и других областях человеческой деятельности.
1.Теория одиночного кадрового снимка
1.1 Основные свойства кадрового снимка.
В съемочных камерах, предназначенных для получения кадровых снимков, используются центральные или электронные затворы.
Кадровый снимок представляет собой центральную проекцию снимаемого объекта на плоскость, в случае, если на снимке отсутствуют смещения точек, вызываемые дисторсией объектива съемочной камеры, атмосферной рефракцией и другими причинами (Рис. 1.1.1).
Связка проектирующих лучей - совокупность проектирующих лучей, при помощи которых получен снимок, точка, в которой пересекаются проектирующие лучи - центр проекции.
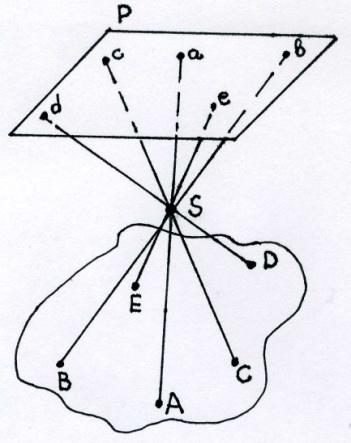
Негативное (обратное) и позитивное (прямое) изображения

Позитив P получают в случае, когда объект и плоскость проекции расположены по одну сторону от центра проекции S, а негатив N – в в случае когда объект и плоскость проекции расположены по разные стороны от центра проекции S.
Негатив и позитив располагаются симметрично по разные стороны от центра проекции S. Если негатив развернуть на 180о вокруг оси, проходящей через центр проекции S параллельно плоскостям негатива и позитива, а затем развернуть вокруг оси, лежащей в плоскости позитива и перпендикулярной оси первого разворота, то все точки негатива совпадут с точками позитива. Поэтому при анализе снимка можно рассматривать как негатив, так и позитив.
Элементы
снимка. 
P – плоскость снимка.
E – предметная (горизонтальная) плоскость.
S – центр проекции (точка фотографирования).
о – главная точка снимка – след пересечения плоскости снимка главным лучом. Главный луч – это луч, проходящий через центр проекции S перпендикулярно плоскости снимка.
So = f – фокусное расстояние съемочной камеры – расстояние от центра проекции до главной точки снимка.
n – точка надира – пересечение отвесной линии, проходящей через центр проекции, с плоскостью снимка.
N – проекция точки надира снимка на плоскость Е.
SN = H – высота фотографирования - высота центра проекции относительно предметной плоскости.
αо – угол наклона снимка.
on = f tg αo.
Любая точка местности М на снимке изображается точкой m Прямой линии на местности (K-L) в общем случае соответствует прямая (k-l) на снимке. В частном случае, когда прямая линия на местности (D-F) проходит через центр проекции S, она изображается на снимке в виде точки (df).

Рис. 1.1.4
Точка надира n является точкой схода изображений на снимке вертикальных линий объекта
AB и DM - вертикальные линии на объекте, а ab и dm – их изображения в плоскости снимка P.
Если продолжить изображения вертикальных линий ab и dm, то они пересекутся в точке надира n. Для доказательства этого достаточно провести плоскости через вертикальные линии AB и DM и центр проекции S. Так как эти плоскости вертикальные, то они пересекутся по вертикальной линии SN, проходящей через центр проекции S и точку надира n (которая по определению является точкой пересечения плоскости снимка с отвесной линией, опущенной из центра проекции S). Очевидно, что изображения ab и dm вертикальных линий AB и DM находятся на следах сечения плоскости снимка вертикальными плоскостями SAB и SDM и пересекаются в точке надира n.

пример изображения на снимке зданий прямоугольной формы.
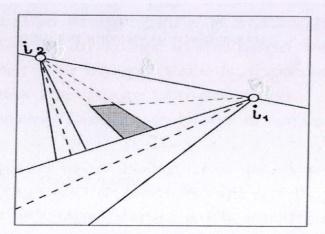
Линия действительного горизонта ii является геометрическим местом точек схода i изображений параллельных прямых линий, расположенных в предметной плоскости E
Построим изображение прямой АВ, расположенной в предметной плоскости Е. Для этого сначала продолжим данную прямую до пересечения с осью перспективы ТТ (линия пересечения плоскости снимка с плоскостью объекта). Полученная таким образом точка Т является одновременно и изображением на снимке. Теперь продолжим линию АВ в обратном направлении до бесконечности. Очевидно, что проектирующий луч, идущий от бесконечно удаленной точки, принадлежащей прямой линии, параллелен этой линии и пересекает снимок в точке схода i, лежащей на линии действительного горизонта. Изображение линии на снимке получают в результате соединения точек i и Т.
Аналогично строят изображения других линий. Если они параллельны между собой в плоскости Е, то из изображения на снимке пересекаются в точке схода i.
пример изображения на перспективном снимке
прямых участков дороги и
прямоугольного объекта
Системы координат кадровой съемочной системы (снимка). Элементы внутреннего ориентирования кадровой съемочной системы (снимка).
Координаты изображений точек местности x, y и z = 0 на снимках определяются в правой пространственной прямоугольной системе координат съемочной системы o’xyz.
Эта система координат в аналоговых съемочных камерах задается координатными метками, расположенными в плоскости прикладной рамки Ось х этой системы проходит через координатные метки 1-2. Началом системы координат - точка о’, получаемая в результате пересечения оси х с линией, проведенной через координатные метки 3 и 4. Ось y лежит в плоскости снимка Р и перпендикулярна оси х, а ось z дополняет систему до правой
В цифровых съемочных камерах система координат o’xyz задается светоприемной матрицей. Оси х и у системы координат o’xyz, в этом случае, параллельны соответственно строкам и столбцам светоприемной матрицы, а ее начало совмещают с левым нижним углом матрицы, центром ее левого нижнего пикселя или центром матрицы.
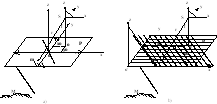
Любая точка снимка, например m, имеет в системе координат съемочной системы координаты m(х, у, z =0). Центр проекции S в этой системе имеет координаты S ( x=xо, y=yо, z=f ).
f-фокусное расстояние съемочной системы, а хо и уо – координаты главной точки снимка - о.
Для
восстановления связки проектирующих
лучей, сформировавших снимок в системе
координат o’xyz,
необходимо для каждой точки снимка
определить координаты вектора
 в
этой системе координат по измеренным
на снимке координатам точкиm.
в
этой системе координат по измеренным
на снимке координатам точкиm.
 (1.2.1)
(1.2.1)
Наиболее часто в практике фотограмметрии используют систему координат съемочной системы Sxyz, началом системы координат которой является центр проекции S, а оси координат параллельны соответствующим осям системы координат o’xyz.
Так
как система координат Sxyz
параллельна системе координат o’xyz
координаты векторов в обеих системах
координат равны, т.е. координаты вектора
 в системе координатSxyz
определяется выражением (1.2.1).
в системе координатSxyz
определяется выражением (1.2.1).
Из выражения (1.2.1) следует, что для восстановления связки проектирующих лучей, необходимо измерить координаты точки и знать значения координат центра проекции S в системе координат o’xyz - f , хо и yо, которые называются элементами внутреннего ориентирования съемочной системы.
К элементам внутреннего ориентирования также относятся параметры радиальной и тангенциальной фотограмметрической дисторсии объектива съемочной камеры.
Для определения поправок в координаты х и у изображений точек, исключающих влияние фотограмметрической дисторсии, часто используются уравнения
 ,
(1.2.2)
,
(1.2.2)
в которых:
 ,
,
k1, k2, k3 – коэффициенты радиальной дисторсии,
P1, P2 - коэффициенты тангенциальной дисторсии .
При
наличии дисторсии объектива координаты
вектора
 определяют по формуле
определяют по формуле
 (1.2.3)
(1.2.3)
Значения элементов внутреннего ориентирования съемочной системы и коэффициенты фотограмметрической дисторсии определяют в процессе проведения фотограмметрической калибровки съемочных камер.
Необходимо отметить, что в фотограмметрической литературе наряду с терминами - элементы внутреннего и внешнего ориентирования съемочной системы широко используются термины - элементы внутреннего и внешнего ориентирования снимка. Использование этих терминов сложилось исторически, хотя с точки зрения строгой теории целесообразно пользоваться терминами - элементы внутреннего и внешнего ориентирования съемочной системы.
Системы координат объекта. Элементы внешнего ориентирования съемочной системы (снимка).
При решении фотограмметрических задач по снимкам положение точек объекта (местности) и съемочной системы в момент получения снимка определяют в прямоугольной пространственной системе координат объекта OXYZ.
В качестве этой системы координат при выполнении фотограмметрических работ по созданию карт и других документов о местности обычно используют геоцентрическую или топоцентрическую системы координат. Так как топографические карты и другие документы о местности создаются в государственных картографических системах координат (В России в системах координат СК 42, СК 95 и Балтийской системе высот), в процессе фотограмметрической обработки снимков её результаты преобразуют в государственные системы координат и высот.
При фотограмметрической обработке снимков используют также прямоугольные системы координат связанные с характерными точками снимаемого объекта. Таких системы применяют в тех случаях когда нет необходимости отображать объекты в государственных системах координат, например при съемке архитектурных сооружений и документации дорожных происшествий.
Положение и ориентацию системы координат съёмочной системы в системе координат объекта OXYZ определяют элементы внешнего ориентирования съемочной системы .
Положение центра проекции S в системе координат объекта определяют его координаты Xs,Ys,Zs.
Угловая ориентация системы координат съемочной системы относительно системы координат объекта определяется ортогональной матрицей:
 (1.3.1)
(1.3.1)
В матрице А элементы (направляющие косинусы) аij являются косинусами пространственных углов между осями системы координат объекта OXYZ и снимка Sxyz.
Направляющие косинусы являются координатами единичных векторов (ортов), совпадающих с осями координат съемочной системы в системе координат объекта.
Вследствие особых характеристик ортогональной матрицы:
А-1=Ат,
а Ат
A
= Е = .
.
В матрице направляющих косинусов независимы только 3 элемента, следовательно, элементы этой матрицы являются функцией 3 параметров.
В качестве этих параметров в фотограмметрии наиболее часто используют углы - , и , которые называют угловыми элементами внешнего ориентирования съемочной системы.
Последовательно поворачивая систему координат объекта OXYZ вокруг ее осей на эти углы, можно ориентировать ее параллельно осям системы координат съемочной системы. При этом последовательность и направление вращений могут быть произвольными. Поэтому в фотограмметрии используют различные системы угловых элементов ориентирования съемочной системы.
Рассмотрим
наиболее широко используемую систему
угловых элементов ориентирования
съемочной системы,
в которой система координат объекта
OXYZ
поворачивается последовательно против
часовой стрелки (правые углы) вокруг
осей X,Y и
Z соответственно
на углы ,
и .
Геометрическая интерпретация угловых элементов внешнего ориентирования показана на рис.1.3.1.
-поперечный угол наклона. Угол в координатной плоскости YZ между осью Z и проекцией оси z на плоскость YZ;
- продольный угол наклона. Угол между проекцией оси z на плоскость YZ и осью z;
- угол разворота снимка. Угол в плоскости снимка Р между следом сечения этой плоскости плоскостью Xz и осью х снимка.
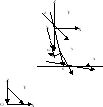
Рис.1.3.1
Значение элементов aij матрицы А можно получить путем последовательного перемножения матриц составленных для последовательных поворотов системы координат объекта ОХYZ на углы , и .
В результате поворота системы координат ОХYZ или что тоже самое системы координат SXYZ на угол эта система преобразуется в систему координат SX’Y’Z’ (рис.1.3.2)
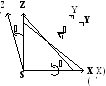
Рис.1.3.2
В соответствии с выражением 1.3.1 матрица

В результате поворота на угол система координат SX’Y’Z’ преобразуется в систему координат SX”Y”Z” (рис.1.3.3).

Рис.1.2.3
В соответствии с выражением 1.3.1 матрица

В результате поворота системы координат SX”Y”Z” на угол эта система преобразуется в систему координат съемочной системы Sxyz (рис.1.3.4).

Рис.1.3.4
В соответствии с выражением 1.3.1 матрица

В результате перемножения матриц
 ,
,
получим значения элементов aij , как функции углов , и
 (1.3.2)
(1.3.2)
Если известны значения направляющих косинусов aij, то из выражений (1.3.2) можно получить значения углов ,,.
 (1.3.3)
(1.3.3)