

План ускорений и его свойства
Планом ускорений называется графическое построение, с помощью которого можно определить ускорение любой точки какого-либо звена механизма.
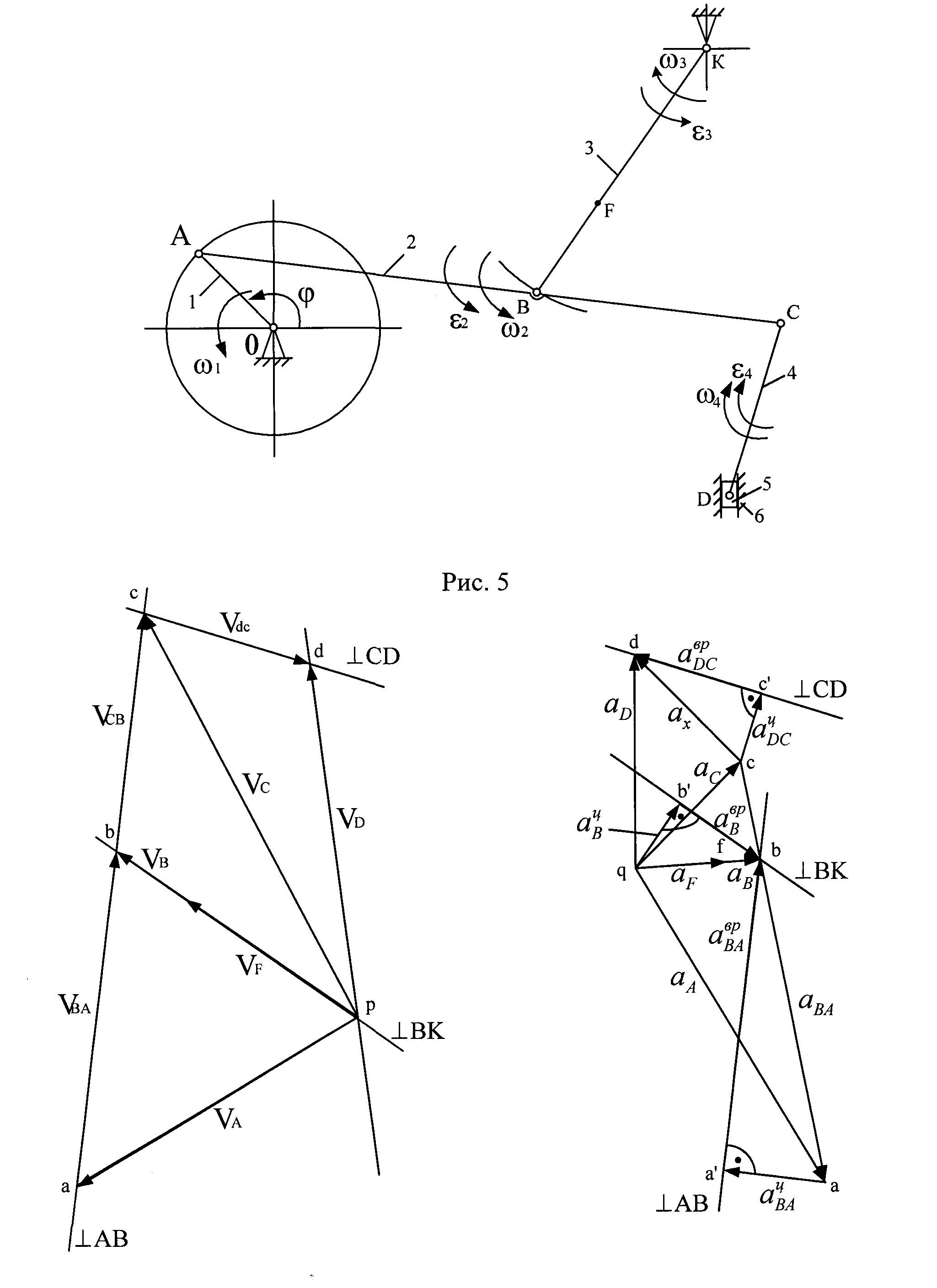
Рассмотрим построение плана ускорений и его свойства на примере звена механизма, которое совершает сложное плоское движение (Рис. 5).
Пусть
известно ускорение точки А
звена, его угловая скорость
![]() и
угловое ускорение
и
угловое ускорение
![]() .
.
Используя теорему сложения ускорений при плоском движении [I], можно получить следующие выражения для определения ускорений точек В и С;
![]()
![]()
Здесь
![]() и
и
![]() -
центростремительные составляющие
ускорения относительного вращательного
движения точек В
и С
вокруг точки А.
Они направлены всегда к центру вращения
и определяются из зависимостей:
-
центростремительные составляющие
ускорения относительного вращательного
движения точек В
и С
вокруг точки А.
Они направлены всегда к центру вращения
и определяются из зависимостей:
![]()
![]() (3)
(3)
Вращательные
составляющие относительных ускорений
![]() и
и
![]() перпендикулярны
центростремительным. Их направление
определяется в соответствии с угловым
ускорением звена, а величина подсчитывается
по формулам:
перпендикулярны
центростремительным. Их направление
определяется в соответствии с угловым
ускорением звена, а величина подсчитывается
по формулам:
![]()
![]() (4)
(4)
Построение плана ускорений (Рис. 6) производится аналогично построению плана скоростей путем графического сложения векторов согласно уравнениям (2).
Построив
план ускорений, можно убедиться, что
концы векторов
![]() ;
;![]() ;
;
![]() образуют
на плане ускорений треугольник аbс,
подобный и сходственно
расположенный
с треугольником АВС
звена механизма (Рис. 5).
образуют
на плане ускорений треугольник аbс,
подобный и сходственно
расположенный
с треугольником АВС
звена механизма (Рис. 5).
Действительно,
![]() (5)
(5)
![]() (6)
(6)
Поделив
выражение (5) на (6), устанавливаем, что
отрезки
![]() и
и
![]() на плане ускорений пропорциональны
отрезкам АВ
и АС
звена механизма.
на плане ускорений пропорциональны
отрезкам АВ
и АС
звена механизма.
Далее известно, что
т.е.
величина угла
![]() одинакова
для всех точек звена. Угол
одинакова
для всех точек звена. Угол
![]() между векторами
между векторами
![]() и
и
![]() равен углу между АВ
и А
С
(Рис. 5).
равен углу между АВ
и А
С
(Рис. 5).
Следовательно,
угол между векторами
![]() и
и
![]() тоже
равен
тоже
равен
![]() ,
так как эти вектора наклонены по отношению
к своим центростремительным составляющим
в одну сторону на один и тот же угол
,
так как эти вектора наклонены по отношению
к своим центростремительным составляющим
в одну сторону на один и тот же угол
![]() .
Таким образом, треугольник abc
на плане ускорений подобен треугольнику
АВС
звена механизма.
.
Таким образом, треугольник abc
на плане ускорений подобен треугольнику
АВС
звена механизма.
Отсюда
может быть отмечено главное свойство
плана ускорений (аналогично плану
скоростей) - способность образовывать
фигуры, подобные и сходственно
расположенные с фигурами на звене
механизма. При этом фигура на плане
ускорений
![]() повернута
на угол
повернута
на угол
![]() по
отношению к подобной фигуре звена
механизма
по
отношению к подобной фигуре звена
механизма
![]() в
направлении углового ускорения звена.
Все остальные свойства плана ускорений
также аналогичны соответствующим
свойствам плана скоростей. Они дают
возможность определить ускорения любой
точки звена, если известны ускорения
двух любых его точек. Построение
выполняется аналогично соответствующим
построениям на плане скоростей.
в
направлении углового ускорения звена.
Все остальные свойства плана ускорений
также аналогичны соответствующим
свойствам плана скоростей. Они дают
возможность определить ускорения любой
точки звена, если известны ускорения
двух любых его точек. Построение
выполняется аналогично соответствующим
построениям на плане скоростей.
План скоростей и ускорений для шестизвенного
рычажного механизма
Схема механизма показана на Рис. 7. Он образован присоединением к
начальному механизму (кривошип 1 и стойка 6) двух двухзвенных структурных
групп: шатун 2 - коромысло 3 и шатун 4 - ползун 5.
Ведущее
звено - кривошип 1, ведомое - ползун 5,
движущийся поступательно. Размеры
звеньев считаем известными. Положение
механизма определяется углом
![]() поворота
кривошипа. Задана величина и направление
угловой скорости
поворота
кривошипа. Задана величина и направление
угловой скорости
![]() кривошипа.
Для упрощения задачи считаем её
постоянной.
кривошипа.
Для упрощения задачи считаем её
постоянной.
Скорость точки А, принадлежащей звеньям 1 и 2, определим как окружную во вращательном движении
![]() Вектор
Вектор
![]() направлен
перпендикулярно OA
в сторону, соответствующую
направлен
перпендикулярно OA
в сторону, соответствующую
Для определения скорости точки В, принадлежащей 2 и 3 звеньям, разложим движение звена 2 на поступательное вместе с точкой А и относительное вращательное вокруг точки А. В соответствии с этим запишем для точки В векторное уравнение
![]() (7)
(7)
В
данном уравнении вектор
![]() является
известным по величине и
является
известным по величине и
направлению.
Линия
действия скорости
![]() относительного
вращательного движения точки В
вокруг точки А
перпендикулярна линии АВ
шатуна. Линия действия скорости
относительного
вращательного движения точки В
вокруг точки А
перпендикулярна линии АВ
шатуна. Линия действия скорости
![]() перпендикулярна линии ВК
коромысла, совершающему вращательное
движение вокруг точки К.
перпендикулярна линии ВК
коромысла, совершающему вращательное
движение вокруг точки К.
Решение векторного уравнения (7) производим графически путём построения плана скоростей (Рис. 6).
Из
полюса р
проводим отрезок ра
произвольной длины, изображающий вектор
![]() .
Масштаб плана скоростей
.
Масштаб плана скоростей
Далее
из полюса р
проводим линию действия
![]() перпендикулярно
линии
перпендикулярно
линии
коромысла
ВК.
Из точки а
конца вектора
![]() проводим
линию действия
проводим
линию действия
![]() перпендикулярно
АВ.
Точка b
пересечения этих линий определяет
величины скоростей
перпендикулярно
АВ.
Точка b
пересечения этих линий определяет
величины скоростей
![]()
Направление
векторов
![]() и
и
![]() должно
соответствовать уравнению (7).
должно
соответствовать уравнению (7).
Угловая скорость шатуна АВ
![]()
Схема механизма
Её
направление соответствует направлению
вектора
![]()
Угловая скорость коромысла ВК
![]()
Её
направление соответствует направлению
вектора
![]()
Для нахождения вектора скорости точки С шатуна воспользуемся
изображающими свойствами плана скоростей. В соответствии с ними три точки
одного звена на схеме механизма образуют треугольник, подобный и
сходственно расположенный с треугольником на плане скоростей, вершинами
которого являются концы векторов скоростей этих точек. В данном случае все
три точки А, В, С лежат на одной линии. Следовательно, изображающая точка
с на плане скоростей должна находиться на продолжении линии аb (за точкой
b). Её положение найдём из пропорции
![]()
Величина
скорости
![]()
Аналогично можно определить скорости точки Р коромысла ВК. При этом
следует учесть, что скорость коромысла 3 известна также в двух точках: в точке
В
и в точке К
![]() Изображающая
точка k
на плане скоростей совпадает с
Изображающая
точка k
на плане скоростей совпадает с
полюсом р. Изображающая точка f находится на отрезке bр. Отрезок fp
найдётся из пропорции
![]()
Величина
скорости
![]() .
Для
определения скорости точки D,
.
Для
определения скорости точки D,
принадлежащей 4 и 5 звеньям, раскладываем движение звена 4 на переносное с
точкой С и относительное вращательное вокруг точки С. В соответствии с этим
запишем для точки D векторное уравнение
![]() (8)
(8)
Линия
действия скорости
![]() относительного вращательного движения
относительного вращательного движения
точки D вокруг точки С перпендикулярна линии DС шатуна. Линия действия
скоростей
![]() направлена
вдоль хода ползуна. Для графического
решения
направлена
вдоль хода ползуна. Для графического
решения
уравнения
(8) из полюса р
проводим линию действия скорости
![]() параллельно
параллельно
линии
хода ползуна, а через точку с
-
линию действия скорости
![]()
перпендикулярно DС. Точка d пересечения этих линий определяет величины
скоростей.
![]()
Направление
векторов
![]() и
и
![]() должно
соответствовать уравнению (8).
должно
соответствовать уравнению (8).
Угловая скорость шатуна СD
![]()
Её направление соответствует направлению V ос .
Построение плана ускорений выполним для того же положения механизма
(Рис. 7). Ускорение точки А складывается из двух составляющих:
центростремительного
![]() и
вращательного
и
вращательного
![]()
![]()
![]()
Так
как
![]() угловое ускорение кривошипа
угловое ускорение кривошипа
![]() Следовательно,
Следовательно,
![]() .
Вектор
.
Вектор
![]() направлен
параллельно ОА
к центру вращения (точке О).
направлен
параллельно ОА
к центру вращения (точке О).
Определение ускорения точки В шатуна производится на основании
разложения движения звена 2, принятого ранее при построении плана
скоростей.
В соответствии с этим запишем для точки В векторные уравнения
![]() (9)
(9)
При
этом необходимо учесть, что ускорение
![]() точки
В
относительно
точки
В
относительно
точки
а
складывается из центростремительной
![]() и
вращательной
и
вращательной
![]()
составляющих. Рассматривая точку В, как принадлежащую коромыслу ВК,
раскладываем
её ускорение на центростремительное
![]() и
вращательное
и
вращательное
![]() .
.
Тогда уравнение (9) приобретает вид
![]() (10)
(10)
Решение данного уравнения производим графическим путём построения
плана ускорений (рис.7).
Из полюса q проводим отрезок qa произвольной длины, изображающий
вектор
![]() .
Масштаб
плана ускорений
.
Масштаб
плана ускорений
Из
точки а
проводим вектор
![]() параллельно
АВ
в направлении от точки
параллельно
АВ
в направлении от точки
В к точке А.
Величина этого ускорения
![]()
Длина соответствующего отрезка на плане ускорений
![]()
Из
полюса q
проводим
вектор
![]() параллельно
ВК
в направлении от точки
параллельно
ВК
в направлении от точки
В к точке К.
Величина
этого ускорения
![]()
Длина соответствующего отрезка на плане ускорений
![]()
Из точки
![]() проводим линию действия вектора
проводим линию действия вектора
![]() перпендикулярно АВ,
перпендикулярно АВ,
а из точки
![]() проводим линию действия вектора
проводим линию действия вектора
![]() перпендикулярно
ВК.
перпендикулярно
ВК.
Точка b пересечения этих линий определяет величины ускорений.
![]()
![]()
![]()
![]()
Направление векторов должно соответствовать уравнениям (14), (15).
Угловое ускорение шатуна АВ:
![]()
Его направление
соответствует направлению вектора
![]()
Угловое ускорение
коромысла ВК:
![]()
Его направление
соответствует направлению вектора
![]()
Для нахождения вектора ускорения точки C воспользуемся
изображающими свойствами плана ускорений, которые аналогичны свойствам
плана скоростей. Изображающая точка c на плане будет находиться на
продолжении отрезка ab за точкой b. Величина отрезка ас определяется из
пропорции:
![]()
Величина
ускорения
![]() Аналогично можно
определить
Аналогично можно
определить
ускорение точки F коромысла ВК. При этом следует учесть, что ускорение
коромысла 3 известно
также в двух точках: в точке В
и в точке К
![]() .
.
Изображающая точка k на плане ускорений совпадает с полюсом q.
Изображающая f будет находиться на отрезке bq. Отрезок fq находится из
пропорции:
![]()
Величина
ускорения
![]() .
.
Для определения ускорения D, принадлежащей 4 и 5-му звеньям,
раскладываем движения звена 4 на переносное с точкой С, ускорение которой
уже известно, и относительное вращательное вокруг точки С. В соответствии с
этим запишем для точки D векторное уравнение
![]() (16)
(16)
При
этом учитываем, что ускорение
![]() точки
D
относительно точки С
точки
D
относительно точки С
складывается
из центростремительного
![]() и
вращательного
и
вращательного
![]()
Тогда уравнение (11) принимает вид
![]() (12)
(12)
Решение данного уравнения производим графически на плане ускорений.
Из
конца вектора
![]() (точка с)
проводим вектор
(точка с)
проводим вектор
![]() параллельно
DC
в
параллельно
DC
в
направлении от точки D к С. Величина этого ускорения
![]()
Длина соответствующего отрезка на плане ускорений
![]()
Из полюса q проводим линию действия ускорения точки D, параллельно
линии
хода ползуна, а из точки
![]() линию
действия вектора
линию
действия вектора
![]()
перпендикулярно DC. Тогда точка d пересечения этих линий определяет
величину
ускорений
![]()
Направления векторов должно соответствовать уравнениям (11), (12).
Угловое
ускорение шатуна CD
![]()
Его
направление соответствует направлению
вектора
![]()