

3.1 Выбор регулятора
К выбору типа регулятора следует подойти очень внимательно, так как от него зависит надежность устойчивой работы АСР. Кроме правильного выбора следует также и правильно настроить регулятор, только тогда мы добьемся требуемое качество регулирования.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
 И
– регулятор со статическим ОР – при
медленных изменениях возмущений и малом
времени запаздывания (τ/То<0,2);
И
– регулятор со статическим ОР – при
медленных изменениях возмущений и малом
времени запаздывания (τ/То<0,2);
П – регулятор со статическим и астатическим ОР – при любой инерционности и времени запаздывания, определяемом соотношением τ/То<0,2;
ПИ – регулятор – при любой инерционности и времени запаздывания ОР, определяемом соотношением τ/То<1;
ПИД – регуляторы при условии τ/То<1 и малой колебательности исходных процессов.
В нашем случае подходящим является ПИ-регулятор, т.к. по условиям задачи на объект действуют возмущения, вызывающие отклонения уровня, соответствующие 20% при перестановке регулирующего органа и по виду переходного процесса и передаточной функции. Если при дальнейших расчетах окажется, что ПИ-регулятор не удовлетворяет заданным условиям, нам необходимо выбрать более сложный (и, следовательно, более дорогой) ПИД-регулятор, который имеет лучшие показатели регулирования.
За критерий оптимальности регулирования для нашего случая примем процесс с 20% перерегулированием, обеспечивающий малое время регулирования переходного процесса и имеющий динамическую ошибку меньшую, чем при критерии с минимальным временем регулирования, тем более, что объект допускает 20% перерегулирование.
 Для
определения параметров настройки
типовых регуляторов в АСР с объектом
первого порядка с запаздыванием при
различных критериях оптимальности
можно воспользоваться следующими
формулами:
Для
определения параметров настройки
типовых регуляторов в АСР с объектом
первого порядка с запаздыванием при
различных критериях оптимальности
можно воспользоваться следующими
формулами:
kp=0.7/(k0 τ/T0)=0.7/(3.3*0.32)=0.66
Tu = 0.7*T0 =0.7*500 = 350
Ku = Tu = 350
Для того чтобы построить и проанализировать переходную и частотные характеристики, необходимо в программе Matlab – Simulink собрать схему. Но для того, чтобы построить схему, сначала необходимо построить структурно-функциональную блок-схему САР (Рис.4), а потом на основе этой схемы построить математическую схему САР (Рис.5).

Рис.4 Структурно-функциональная блок-схема системы автоматического регулирования температуры
ЗО – задающий орган; Р – регулятор; ИМ – исполнительный механизм; ОУ – объект управления.

Рис.5 Математическая схема системы автоматического
регулирования температуры.
Wp – передаточная функция ПИ-регулятора;
Wим – передаточная функция исполнительного механизма;
Wоу – передаточная функция объекта управления.
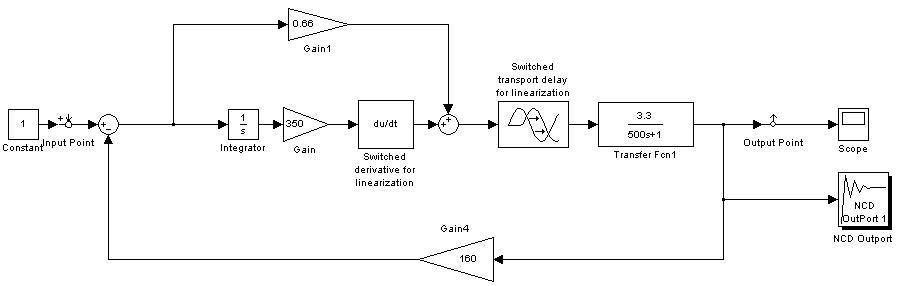
Рис.6 Система автоматического регулирования температуры сушки кирпича-сырца
3.2 Анализ динамических характеристик аср с регулятором
По виду переходной характеристики можно определить показатели качества переходного процесса:

Рис.7 Переходная характеристика САР с ПИ-регулятором.
Время регулирования: 7.4 с;
Время нарастания: 1.22 с;
Статическая ошибка: 0;
Перерегулирование: 20.1 %
Чтобы получить логарифмические амплитудные и фазовые характеристики, по которым можно определить запасы устойчивости по амплитуде и фазе необходимо разомкнуть систему.

 Рис.8
Графики ЛАХ и ЛФХ системы регулирования
температуры с регулятором.
Рис.8
Графики ЛАХ и ЛФХ системы регулирования
температуры с регулятором.

Рис.9 График АФЧХ системы регулирования температуры с регулятором.
Из рис.9 видно, что система является устойчивой, т.к. годограф не охватывает точку (0,-1) (критерий устойчивости Найквиста).