

3.3 Содержание отчета
3.3.1 Цель и программа работы
3.3.2 Расчеты необходимых параметров.
3.3.3 Схемы моделирования.
3.3.4 Осциллограммы.
3.3.5 Анализ полученных результатов, выводы.
4 Лабораторная работа. Построение и исследование модели регулируемого полупроводникового электропривода постоянного тока.
Цель работы: на основе виртуальных моделей трехфазного мостового управляемого выпрямителя и электродвигателя постоянного тока с независимым возбуждением исследовать электропривод постоянного тока с регулированием скорости по цепи якоря.
4.1 Основные положения к выполнению работы
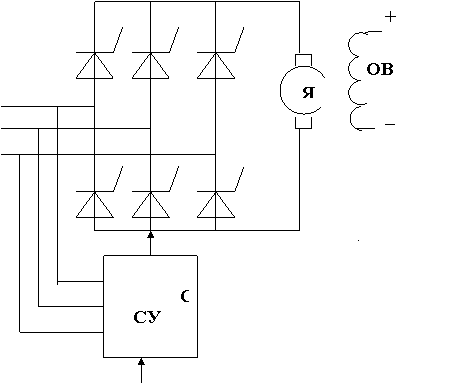
Одним из основных способов регулирования скорости электродвигателей постоянного тока является регулирование напряжением по цепи якоря двигателя, что следует из уравнения электромеханической характеристики двигателя (см. уравнение 2.4). Получить регулируемое напряжение постоянного тока можно с помощью управляемого тиристорного выпрямителя. Подключив к тиристорному выпрямителю якорь электродвигателя мы получаем регулируемый электропривод постоянного тока (см. рисунок 4.1). Плавное изменение угла управления α выпрямителем, обеспечивает регулирование скорости электродвигателя от нулевой до номинальной (см. уравнение 4.1). Модель электропривода, реализующая такой принцип регулирования представлена на рисунке 4.2.
![]() (
4.1)
(
4.1)
Vs1 – vs6
|
|
|
|
|
|
UЗ ( угол управления -α)
Рисунок 4.1 - VS1- VS6 – тиристоры; Я – якорь электродвигателя;
ОВ- обмотка возбуждения; СУ- система управления
4.2 Программа работы
4.2.1 По заданному преподавателем варианту (Приложение А)
выписать необходимые для моделирования параметры электродвигателя.
4.2.2 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель (см. рисунок 4.2). Установить параметры блоков и элементов модели в соответствии параметрами заданного двигателя. Угол управления α = 0. Произвести настройку параметров моделирования и осциллографов.
4.2.3 Осуществить пуск модели, дождаться окончания переходного процесса и при работающей модели электропривода произвести наброс нагрузки. Зарисовать полученные осциллограммы напряжения на двигателе, процесса изменения скорости и тока.
4.2.4 Повторить проведенные испытания при угле управления α = 300,600, 750. Сравнить полученные осциллограммы, сделать выводы.
4.2.5 На основании полученных данных построить зависимость ω = f (α)
4.3 Содержание отчета
4.3.1 Цель и программа работы
4.3.2 Схемы моделирования, осциллограммы, графики.
4.3.3 Анализ полученных результатов, выводы.
5 Лабораторная работа. Метод структурного моделирования в исследовании динамики электропривода с системой подчиненного регулирования
Цель работы: в среде программного обеспечения Matlab Simulink произвести моделирование динамической системы тиристорный преобразователь – электродвигатель постоянного тока с системой автоматического управления, построенной по принципу подчиненного регулирования.