

Лазерное сканирование 2014 / Литература Лекции / Середович В.А., Комиссаров А.В., Комиссаров Д.В., Широкова Т.А. Наземное лазерное сканирование. 2009
.pdfI Ai , TAi – ионосферная и тропосферная задержки;
d A , d i – задержка сигналов в аппаратуре приемника и спутника; dmiA – влияние многопутности на измеряемые расстояния;
eiA – случайная ошибка измерений (шум); i – порядковый номер спутника.
В формуле (38) нижний индекс показывает, к какому пользовательскому приемнику относятся измерения.
Рассмотрим каждый вид поправок подробнее.
Поправки часов для приемника и спутника. Моменты времени выхода сигнала со спутника и поступления на приемник должны принадлежать единой системе отсчета. Ввиду того, что на спутнике используется один генератор времени (более высокоточный), а в приемнике – другой, единство системы времени не обеспечивается. Поэтому в измеренную дальность вносят поправки за сдвиги шкал часов для приемника и спутника. При этом, если учитывать, что скорость распространения электромагнитных излучений составляет порядка 3 108 м/с, а точность определения расстояний необходимо обеспечить на уровне 1 см, то погрешность отсчета времени не должна превышать 30 пикосекунд.
Ионосферная задержка. Слой ионосферы расположен на высотах примерно от 50 до 1 000 км над Землей и является областью ионизированных газов (свободных электронов и ионов). Ионизация вызвана солнечной радиацией, вследствие чего плотность заряженных частиц изменяется в течение суток и всего года в больших пределах, а также в течение 11-летнего цикла солнечной активности. Пик плотности заряженных частиц в течение суток обычно достигается в 2 часа истинного времени по полудню. Ионосфера является диспергирующей средой, т. е. влияние ее зависит от длины волны излучения. Величина ионосферной задержки может достигать нескольких десятков метров [133, 135]. Исключение ошибок, вызванных ионосферой, выполняется либо при помощи программного обеспечения, предназначенного для обработки спутниковых измерений, либо при помощи специальных методов наблюдений. Для учета ионосферной задержки разработано большое количество математических моделей, основные из которых приведены в работах [5, 14].
Тропосферная задержка. Этот вид ошибки вызван влиянием тропосферы, тропопаузы и стратосферы. Эти слои носят название нейтральной атмосферы. Природа возникновения тропосферной задержки для световых и радиоволн одинакова. Воздействие нейтральной атмосферы на электромагнитные волны оптического диапазона и радиоволны описано в разделе 1.5.3. Величина тропосферной задержки может составлять несколько десятков метров [5, 14] и зависит от высоты спутника над горизонтом, а также от плотности воздуха по трассе распространения сигнала.
Влияние ионосферы и тропосферы при GPS-измерениях увеличивает геометрическую дальность в большую сторону.
Задержка сигналов в аппаратуре приемника и спутника. Ошибки в измеренных псевдодальностях вызваны задержкой прохождения радиосигнала
через электронные блоки спутника и приемника, вследствие чего увеличивается время распространения электромагнитного излучения по трассе, следовательно, измеренное расстояние будет больше действительного. Ошибки, связанные с задержкой сигналов, являются постоянными для конкретного спутника и приемника.
Многопутность. Данный фактор является главным источником погрешностей спутниковых измерений, также его называют многолучевостью [133]. Эти погрешности возникают вследствие переотражения сигнала от различных объектов. Поэтому один и тот же сигнал, вышедший со спутника, пройдет разную дистанцию до пользовательского приемника, следовательно, будет различна модуляция пришедших сигналов. Существуют два способа исключения влияния многопутности [5, 14, 124]:
 программный, использующий различные математические фильтры в процессе обработки спутниковых геодезических измерений;
программный, использующий различные математические фильтры в процессе обработки спутниковых геодезических измерений;
 инструментальный, предусматривающий применение специальных типов антенн и приборных фильтров, которые блокируют поступление сигналов
инструментальный, предусматривающий применение специальных типов антенн и приборных фильтров, которые блокируют поступление сигналов
содинаковым кодом и временем испускания со спутника, кроме первого сигнала.
Случайные ошибки спутниковых геодезических измерений вызваны флуктуационными изменениями напряжения в цепи спутникового оборудования и приемника, параметров ионосферы и нейтральной атмосферы.
Кроме того, на точность определения линейных элементов внешнего ориентирования сканов с использованием спутниковых геодезических технологий влияют погрешности координат самих спутников.
Геодезическое спутниковое сообщение содержит координаты местоположения спутника в момент испускания с него радиосигнала, известные
сошибкой порядка 3–5 м. Более точные координаты можно получить после постобработки данных о движении спутников на станциях управления, располагающихся по всему земному шару, однако точные координаты спутников не являются общедоступными [5, 123, 124].
Для исключения всех перечисленных ошибок были разработаны относительный и дифференциальный методы спутниковых геодезических измерений. Эти методы предполагают наличие базового приемника (станции), установленного на точке с известными координатами, и роверного (передвижного) приемника. Сущность этих методов заключается в следующем. На базовой станции выполняют измерения псевдодальностей и определяют все поправки, входящие в уравнение (38), а также поправки в координаты местоположения спутника для каждого сеанса наблюдений. Эти поправки передаются на роверный приемник и используются при вычислении координат определяемой точки. В момент измерений роверный и базовый приемники должны «видеть» одни и те же спутники, количество их должно быть не менее четырех, а число сеансов – не менее трех. Расстояние между роверным и базовым приемниками зависит от их типа (одночастотные или двухчастотные) и длительности наблюдений на пунктах.

2.5.Методы прямого определения угловых элементов внешнего ориентирования сканов
Для определения угловых элементов внешнего ориентирования сканов инструментальными методами могут применяться инклинометры и инерциальные геодезические системы (ИГС).
Инклинометры подробно описаны в отечественной литературе [93], поэтому в данной работе рассмотрим только принцип действия инерциальных геодезических систем. Так как ИГС являются дорогостоящими, то они не используются, когда сканер производит измерения в статическом положении, а применяются, когда сканерная съемка выполняется подвижными сканирующими комплексами, к которым можно отнести воздушные лидарные системы, подробно описанные в книге [20], и подвижные наземные сканирующие системы.
Системы, позволяющие определять пространственное положение объектов в движении, возникли в результате объединения трех инструментальных средств: инерциальной геодезической, спутниковой геодезической и сканирующей систем. Предвестником инерциальной геодезической системы (ИГС) является инерциальная навигационная система, первые элементы которой стали применяться на морских судах во время Второй мировой войны. Толчком развития ИГС явилась необходимость решения проблемы управления ракетами, морскими судами, самолетами в послевоенные годы. Эти системы выполняли задачи навигации носителя (судна, ракеты, самолета и т. д.). Дальнейшее развитие они получили благодаря совершенствованию космической техники. В этот период значительно увеличились точностные характеристики инерциальных систем и уменьшилась их масса [17, 48].
Первые попытки объединения данных, полученных инерциальной и спутниковой геодезическими системами, были произведены в конце 1980-х годов. Примерно в это же время и возникла идея создания подвижных сканирующих систем, которые устанавливаются на носитель, при этом съемка объекта выполняется в движении.
Инерциальная геодезическая система включает в себя следующие подсистемы [17, 104]:
 блок из трех акселерометров, которые позволяют определить скорость движения по трем взаимно перпендикулярным осям координат;
блок из трех акселерометров, которые позволяют определить скорость движения по трем взаимно перпендикулярным осям координат;
 систему ориентации осей блока акселерометров по отношению к отсчетной системе координат;
систему ориентации осей блока акселерометров по отношению к отсчетной системе координат;
систему измерения времени; вычислительный блок.
Рассмотрим работу каждой системы более подробно.
Блок из трех акселерометров. В основу работы акселерометров положен второй закон Ньютона, согласно которому векторная производная от количества
движения материальной точки v , имеющей массу m, равна вектору внешней
силы f , действующей на точку, что можно записать в виде формулы

|
|
|
|
|
|
mv |
|
|
|||
f |
, |
(39) |
|||
t |
|||||
|
|
|
|||
или |
|
|
|
|
|
|
|
, |
|
(40) |
|
f |
mw |
|
|||
где |
|
|
– линейное ускорение, приобретаемое точкой под |
||
w |
|
v t |
|||
воздействием внешней силы.
Законы динамики справедливы для движения тела в инерциальном пространстве, задаваемом системой координат.
Из формулы (39) видно, что для непрерывного определения линейного ускорения нужно знать в каждый момент времени величину силы, действующей на единицу массы тела. Устройства, при помощи которых выполняют измерение линейного ускорения, называют акселерометрами или ньтонометрами.
Принцип действия акселерометра, кинематическая схема которого представлена на рис. 39, заключается в следующем. Под воздействием внешней
|
тело массой m приобретает ускорение |
|
силы f |
w , в результате чего оно |
перемещается относительно начальной точки е0 вдоль линии ll1. Возникающее линейное смещение δ измеряется при помощи потенциометра, как показано на рис. 39, в виде напряжения U. Тело m подвешивается на упругие пружины,
благодаря сжатию (натяжению) которых можно определить силу f . Связь между измеренным значением смещения тела потенциометром и силой натяжения пружины устанавливается в результате метрологической аттестации акселерометра [16].
Рис. 39. Кинематическая схема акселерометра
Таким образом, величиной, измеряемой акселерометром, является значение линейного смещения δ, следовательно, он позволяет непрерывно определять
|
или линейное ускорение |
|
силу f |
w . Если на основании носителя наземного |
сканера жестко закрепить три акселерометра во взаимно перпендикулярных направлениях, то можно вычислить величины линейных перемещений сканера вдоль каждой оси координат на момент времени t по формулам:

t |
t |
|
|
|
|
|
|
|
|
|
|
x |
WX d 2t vX |
0 |
t t0 |
x0 |
|
|
|||||
t 0 t 0 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
t |
t |
|
|
|
|
|
|
|
|
|
|
y |
W d 2t |
v |
|
t |
t |
0 |
y |
0 |
, |
(41) |
|
|
Y |
|
Y0 |
|
|
|
|
|
|
||
t 0 t 0 |
|
|
|
|
|
|
|
|
|
|
|
t |
t |
|
|
|
|
|
|
|
|
|
|
z |
W d 2t |
v |
Z 0 |
t |
t |
0 |
z |
0 |
|
|
|
|
Z |
|
|
|
|
|
|
||||
t 0 t 0 |
|
|
|
|
|
|
|
|
|
|
|
где WX, WY, WZ – ускорения точки вдоль осей X, Y, Z;
v X 0 , vY0 , vZ 0 – начальная скорость движения носителя на момент времени t0
соответственно по осям X, Y, Z;
x0 , y0 , z0 – начальные значения перемещений носителя вдоль каждой оси
координат на момент времени t0.
Линейные акселерометры, принципиальная схема которых приведена на рис. 39, можно классифицировать следующим образом [48, 101, 119, 150]:
а) по характеру перемещения инерциальной массы:
споступательным перемещением инерциальной массы;
свращательным движением инерциальной массы;
б) по числу степеней свободы перемещения инерциальной массы относительно корпуса:
одноосные; двухосные; трехосные;
в) по способу подвеса инерциальной системы:
спружинным подвесом подвижной системы;
смеханическим подвесом подвижной системы в жестких опорах (на подшипниках качания, призмах и т. д.);
 с гидравлическим (гидростатическим или гидродинамическим) подвесом;
с гидравлическим (гидростатическим или гидродинамическим) подвесом;
саэродинамическим подвесом;
сэлектромагнитным подвесом;
г) по физической природе сил реакции подвеса:
смеханическими силами реакции;
сэлектромагнитными силами реакции;
сгидродинамическими силами реакции;
саэродинамическими силами реакции.
Ошибки измерения линейных перемещений подвижной сканирующей системы при помощи акселерометров в основном зависят от времени работы инерциальной системы (погрешности возрастают пропорционально времени в третей степени) и характера траектории движения (чем прямолинейнее трасса движения, тем меньше величины ошибок) [48, 101, 119, 150].
Для определения величин x , y , z необходимо знать ориентацию осей акселерометров в инерциальной системе координат, для чего на носителе сканера устанавливается система гироскопов.

Система гироскопов. Главное свойство гироскопа заключается в том, что его ось устойчиво сохраняет приданное ей первоначальное положение. Если на ось гироскопа начинает действовать сила, то ось будет отклоняться не в сторону действия силы, а по направлению, которое имеет вектор момента этой силы относительно неподвижной точки.
Термин «гироскоп» в переводе на русский язык означает «наблюдающий вращение», но в настоящее время под ним понимается любое техническое устройство, позволяющее выявить и измерить его углы поворота в пространстве. Существуют следующие типы гироскопов [16]:
роторные; оптические;
лазерные оптико-волоконные; вибрационные и др.
Сейчас в инерциальных геодезических системах широко применяются оптические гироскопы [20, 104]. Поэтому рассмотрим принцип действия именно этих гироскопов.
Принцип действия оптического гироскопа основан на эффекте Саньяка. По круговому оптическому пути, как показано на рис. 40, благодаря расщепителю луча свет распространяется в двух противоположных направлениях. Если при этом система находится в покое относительно инерциального пространства, оба световых луча распространяются навстречу друг другу по оптическому пути одинаковой длины. В этом случае при сложении лучей в расщепителе по завершении пути нет фазового сдвига. Однако, если оптическая система вращается в инерциальном пространстве с угловой скоростью , между световыми волнами возникает разность фаз. Это явление и называется эффектом Саньяка.
Рис. 40. Принцип возникновения эффекта Саньяка
Пусть коэффициент преломления на оптическом пути n = 1. При радиусе оптического пути r время достижения расщепителя лучей светом, движущимся по часовой стрелке, выражается формулой
t1 (2 r r t1 ) / c , |
(42) |
а светом, движущимся в противоположном направлении, – формулой
t2 (2 r r t2 ) / c. |
(43) |

На основании формул (42) и (43) можно получить разность времени распространения двух световых лучей
t t1 |
t2 |
4 r 2 |
|
|
4S |
, |
(44) |
c2 r 2 2 |
|
c2 |
r 2 2 |
||||
|
|
|
|
|
где S – площадь круга, ограниченного оптическим путем. С учетом того, что c >> r , выражение (44) будет иметь вид
t t1 |
t2 |
4 r 2 |
|
4S |
. |
(45) |
c2 |
|
c2 |
||||
|
|
|
|
|
Из формулы (45) видно, что в данном виде гироскопов из-за вращения оптической системы появляется разность длины круговых оптических путей, равная
L |
4S |
, |
(46) |
||
|
|
|
|||
|
c |
||||
|
|
|
|
||
или разность фаз |
|
||||
|
|
4kS |
, |
(47) |
|
|
|
|
|
||
|
|
c |
|||
|
|
|
|
||
где k – волновое число.
Формула (46) вытекает из формулы (45) при допущении, что n = 1, и оптический путь имеет круговую форму, но возможно доказать, что величина L не зависит от коэффициента преломления, формы оптического пути, положения центра вращения гироскопа О (см. рис. 40), и выражение (46)
является основной формулой, описывающей эффект Саньяка.
Таким образом, в процессе работы оптического гироскопа, установленного на подвижной сканирующей системе, непрерывно будет определяться разность фаз двух лазерных лучей, и тем самым углы поворота инерциальной геодезической системы относительно начального положения.
Работу оптических гироскопов дополняет и уточняет система из акселерометров, которые позволяют определить углы крена и тангажа носителя сканеров. Предположим, что ускорение носителя равно нулю, тогда из рис. 41 вытекает формула для нахождения угла тангажа [20]:
|
|
|
|
|
|
|
|
|
W |
|
|
P |
|
arcsin |
X |
, |
(48) |
|
|
|
g |
|
|
|
|
|
|
|
|
где |
WX – измеренное значение ускорения; |
||||
|
– вектор ускорения силы тяжести. |
||||
g |
|||||
Аналогичным образом вычисляется угол крена носителя сканера.

Рис. 41. Измерение углов крена и тангажа при помощи акселерометров
Гироскопы, принцип действия которых основан на эффекте Саньяка, относятся к гироскопам статического типа и обладают рядом достоинств:
высокая точность; отсутствие подвижных деталей; простота конструкции; короткое время запуска; высокая чувствительность;
высокая линейность характеристик; низкая потребляемая мощность; высокая надежность.
Основной недостаток инерциальных геодезических систем заключается в том, что с течением времени их работы происходит дрейф нулевого отсчета, который тем больше, чем продолжительнее время работы инерциальной системы [96, 132, 149, 152]. В работе [16] предлагается для уменьшения ошибок определения координат ИГС производить кратковременные остановки носителя сканера, в течение которых следует выполнять обнуление сигналов акселерометров и уточнять текущую ориентацию гироскопов, т. е. производить их калибровку. Объединение инерциальной геодезической системы и спутниковой геодезической аппаратуры позволяет выполнять калибровку ИГС прямо в процессе движения носителя [114, 116]. В то же время инерциальная система позволяет определить координаты носителя сканера при проведении спутниковых измерений, когда сигнал теряется или блокируется
[5, 6].
Для синхронизации работы оборудования, включающего: наземный лазерный сканер, системы акселерометров и гироскопов, а также спутниковую геодезическую аппаратуру, – необходимо устанавливать на подвижную сканирующую систему службу времени (или систему времени).
С помощью инерциальной геодезической системы и спутниковой геодезической аппаратуры необходимо определить траекторию движения носителя, что выполняется либо в процессе постобработки результатов измерений, либо в момент сканерной съемки (в реальном времени). В том и другом случаях задача решается с использованием программного обеспечения, поставляемого с подвижными наземными сканирующими системами.
Постобработка геодезических данных заключается в моделировании траектории движения носителя сканера. Для построения модели трассы используются данные с инерциальной системы, которые корректируются в пределах замкнутого контура обмена данными со спутниковыми измерениями. Для этих целей используется фильтр Калмана, реализованный в программах обработки результатов измерений, полученных ИГС и GPS-приемником, а также программный контроллер ошибок инерциальной геодезической системы. Схема совместной постобработки результатов измерений с помощью ИГС и GPS с целью определения траектории движения носителя сканера представлена на рис. 42 [20, 115]. Аналогичный алгоритм используется для построения
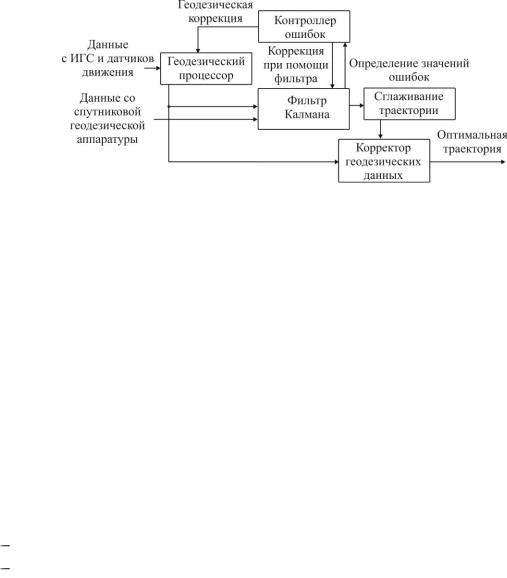
модели трассы движения носителя в реальном времени, однако в этом случае качество решения будет хуже, чем при постобработке измерений [6, 20, 48, 105].
Рис. 42. Схема постобработки данных при совместном использовании инерциальной и спутниковой геодезических систем
Точность измерения пространственных координат инерциальными геодезическими системами и спутниковой геодезической аппаратурой практически одинакова. При этом в основу измерений положены различные физические принципы, что свидетельствует об отсутствии корреляции между результатами измерений обеими системами. Это обстоятельство является преимуществом при совместной обработке данных, полученных ИГС и GPSприемниками [115].
Конечным результатом работы всех блоков подвижной наземной сканирующей системы являются координаты точек объектов в единой заданной системе координат, на качество определения которых влияют следующие факторы [156]:
 точность инерциальной системы, спутниковой аппаратуры и сканирующей системы;
точность инерциальной системы, спутниковой аппаратуры и сканирующей системы;
внешние условия окружающей среды; качество нахождения оптимальной траектории движения носителя
сканера (строгость математического решения, заложенного в программном обеспечении) [116];
 скорость, с которой перемещается носитель, и характер поверхности, по которой он передвигается;
скорость, с которой перемещается носитель, и характер поверхности, по которой он передвигается;
 точность определения элементов редукции сканирующей системы относительно спутниковой аппаратуры и инерциальной системы.
точность определения элементов редукции сканирующей системы относительно спутниковой аппаратуры и инерциальной системы.
На первые три фактора пользователь подвижной наземной сканирующей системы практически повлиять не может. В то же время, точность выполнения такого важного процесса, как определение параметров редукции, зависит непосредственно от качества проведения работ исполнителем.
Определение параметров редукции. Для получения качественных результатов при определении пространственных координат точек объекта при помощи подвижной наземной сканирующей системы необходимо точно знать параметры редукции (в литературе также встречается термин «выставочные параметры») всех блоков (сканера, ИГС и GPS-аппаратуры) относительно друг друга. К таким параметрам относятся следующие [156]:

 ориентация осей системы координат сканера относительно инерциальной системы, которая определяется матрицей направляющих косинусов АINS/ск;
ориентация осей системы координат сканера относительно инерциальной системы, которая определяется матрицей направляющих косинусов АINS/ск;
положение начала системы координат сканера относительно фазового
центра GPS-антенны, что определяется вектором bGPS / ск .
В настоящее время подвижные сканирующие системы выпускают несколько фирм (Leica, Riegl и др.). В комплект этих систем входят сканер, спутниковое геодезическое оборудование и инерциальная система. Все блоки на этих системах устанавливаются в строго отведенные места, вследствие чего проблемы определения параметров редукции для пользователя не возникает. В исключительных случаях может производиться перемещение антенны спутникового геодезического оборудования, тогда необходимо определить положение начала системы координат сканера относительно фазового центра антенны.
Рассмотрим общий случай, когда необходимо определить матрицу АINS/ск и
вектор bGPS / ск , который показан на рис. 43.
На рис. 43: OвнENH – геодезическая система координат; OXYZ – система координат сканера; Xпр – проекция оси X на плоскость ONE; Yпр – проекция оси
Y на плоскость ONE; |
, |
, |
– углы тангажа, крена и разворота НЛС |
|||
относительно ИГС |
соответственно; |
|
– |
вектор, |
||
bGPS EGPS , NGPS , H GPS |
||||||
характеризующий положение фазового центра GPS-антенны OGPS относительно |
||||||
внешней системы координат; |
|
|
– вектор, определяющий положение |
|||
bск |
X ,Y , Z |
|||||
|
|
|
|
|
|
|
точки сканируемого объекта в системе координат сканера; S – вектор, |
||||||
характеризующий пространственное положение точки объекта |
в |
системе |
||||
OвнENH. |
|
|
|
|
|
|
Рис. 43. Определение параметров редукции
Для вывода математической зависимости между величинами, измеренными инерциальной системой (α, ω, κ), GPS-приемником (EGPS, NGPS, HGPS) и лазерным сканером (X, Y, Z), воспользуемся формулой (35) и рис. 43, на основе которых можно записать следующее выражение в векторном виде:
|
|
|
|
|
S |
bGPS |
bGPS / cк A |
AINS / ск bск , |
(49) |
или в координатной форме