

Лазерное сканирование 2014 / Литература Лекции / Середович В.А., Комиссаров А.В., Комиссаров Д.В., Широкова Т.А. Наземное лазерное сканирование. 2009
.pdfРис. 34. Технологическая схема № 1 построения трехмерной векторной модели объектов по данным наземного лазерного сканирования
Предварительная обработка данных наземного лазерного сканирования.
Управление наземным лазерным сканером и предварительная обработка результатов сканирования обычно осуществляются с использованием программного продукта фирмы-изготовителя сканера. Предварительная обработка данных начинается с фильтрации данных. На данном этапе удаляются точки, не принадлежащие моделируемому объекту съемки. Для этой цели используются различные фильтры, например, для удаления шумов, осреднения данных, высокочастотной и низкочастотной фильтрации и т. д.
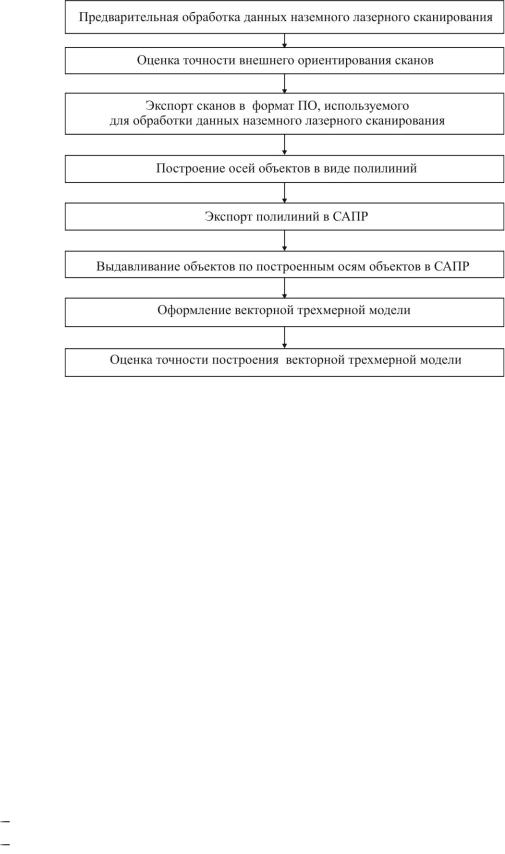
Рис. 35. Технологическая схема № 2 обработки данных наземного лазерного сканирования с целью построения векторной трехмерной модели объектов ситуации
Затем выполняется внешнее ориентирование одиночных точечных моделей (сканов) с целью приведения их в заданную систему координат.
Описание внешнего ориентирования сканов и оценки точности выполнения этого процесса приведено в разделе 2.6.
Оценка точности внешнего ориентирования сканов производится по средней квадратической ошибке единицы веса, вычисляемой при помощи алгоритмов, реализованных в программном обеспечении.
Экспорт внешне ориентированных сканов. Поскольку некоторые программные продукты, предназначенные для обработки сканов, используют внутренний формат (расширение), то возникает необходимость экспорта в них данных из программы, управляющей сканером. Результатом этого процесса является файл с единой точечной моделью.
В технологических схемах, изображенных на рис. 34 и 35, процесс построения трехмерной векторной модели объектов на основе результатов предварительной обработки данных наземного лазерного сканирования включает следующие этапы:
построение трехмерной векторной модели ситуации; построение цифровой модели рельефа.
Построение векторных моделей объектов ситуации по технологической схеме № 1 (см. рис. 34). Основная часть камеральных работ в технологии построения трехмерных моделей местности по данным наземного лазерного сканирования приходится на создание векторных моделей объектов ситуации.

Для построения трехмерных векторных моделей объектов ситуации используются следующие режимы:
автоматический; полуавтоматический; интерактивный.
Выбор режима векторизации точечной модели зависит от формы элементов объектов ситуации, если они имеют правильную форму, то используется автоматический режим создания модели. Полуавтоматический и интерактивный режимы применяются для моделирования объектов неправильной, сложной геометрической формы и маленьких размеров.
В процессе векторизации, с целью как создания цифровых топографических планов, так и построения трехмерной векторной модели целесообразно разделять объекты по слоям. При этом их следует называть по типам объектов, например «забор металлический ниже одного метра», «забор металлический выше одного метра», «забор бетонный», «сетка рабица», «изгородь» и т. д. Такой подход позволяет при оформлении, например топографического плана в геоинформационной системе, быстро изменить стили линий.
Построение векторных моделей ситуации по технологической схеме № 2 (см. рис. 35). При использовании этой технологии оси элементов конструкций показываются в виде полилиний. Также вычерчивается поперечный профиль конструкции на одном из концов оси. Затем эта модель в виде полилиний экспортируется в программу САПР, где выполняется «выдавливание» конструкций по созданным осям [73].
Применение той или иной технологической схемы построения векторной модели зависит от характера элементов ситуации. Для моделирования таких элементов, как уголки, швеллера, двутавровые балки, электрические кабели и провода, целесообразнее применять вторую схему. Для создания моделей зданий, трубопроводов, сферических объектов и т. д. следует использовать первую схему.
Для построения цифровой модели рельефа (ЦМР) по данным НЛС разработана следующая методика [58]:
1)удаление из данных наземного лазерного сканирования в интерактивном режиме точек, принадлежащих деревьям и высотным конструкциям, таким как опоры ЛЭП, здания, трубы, цистерны и т. д. Это необходимо с целью «облегчения» точечной модели для дальнейшей обработки ее при помощи автоматических фильтров;
2)удаление точек, не принадлежащих поверхности земли, с помощью топографического фильтра. Для достижения удовлетворительного результата необходимо несколько раз воспользоваться данным фильтром, при этом каждый раз увеличивая размер анализируемого участка;
3)построение регулярной сетки высот методом Kriging в ПО Surfer для разрежения точечной модели и создания регулярной матрицы высот;
4)построение ЦМР в виде TIN-поверхности (поверхности, представленной нерегулярной сетью треугольников).

Приведем пример построения цифровой модели рельефа (площадью 10 га) с плотностью 1 точка на 0,25 м2 с точностью не ниже 5 см. Сначала из точечной модели удаляются точки, не принадлежащие земле, в интерактивном режиме, а затем при помощи топографического фильтра исключаются точки, не принадлежащие земной поверхности. При этом размер обрабатываемого участка массива точек следует задавать в такой последовательности: 5 5 см, 10 10 см, 20 20 см, 40 40 см, 80 80 см. При каждом изменении размера участка надо следить за тем, чтобы оставшееся после фильтрации количество точек в точечной модели обеспечивало возможность построения ЦМР, адекватную поверхности земли. При образовании «пустот» в точечной модели следует отдельно выполнять фильтрацию точек на данных участках, впоследствии объединяя их с общей точечной моделью. После завершения фильтрации точечная модель передается в программный продукт Surfer, где строится регулярная матрица высот плотностью одна точка на 0,25 м2. На последнем этапе создается ЦМР в виде TIN-поверхности.
Редактирование трехмерной векторной модели местности. Данный процесс осуществляется с целью обеспечения целостности получаемой трехмерной модели. Обычно редактирование выполняется в системах автоматизированного проектирования, например, AutoCAD.
Создание базы данных. Для решения практических задач с использованием трехмерной модели местности она интегрируется или «связывается» с базой данных, в которой содержится различная семантическая информация. Для удобства работы с базой данных и моделью они разделяются по слоям [76].
Оценка точности построения трехмерной модели местности. Оценка точности построения трехмерной модели местности по данным наземного лазерного сканирования может выполняться двумя способами:
 по средним квадратическим ошибкам координат характерных точек местности, полученным по векторной модели и в полевых условиях одним из известных геодезических способов, например с помощью электронного тахеометра;
по средним квадратическим ошибкам координат характерных точек местности, полученным по векторной модели и в полевых условиях одним из известных геодезических способов, например с помощью электронного тахеометра;
 по разностям длин линий, полученным в полевых условиях и по созданной векторной модели.
по разностям длин линий, полученным в полевых условиях и по созданной векторной модели.
 В качестве контрольных используются точки, которые не должны изменять свое пространственное положение за время между моментами сканирования и контрольными геодезическими измерениями.
В качестве контрольных используются точки, которые не должны изменять свое пространственное положение за время между моментами сканирования и контрольными геодезическими измерениями.
С целью создания по данным наземного лазерного сканирования крупномасштабных планов и чертежей камеральные работы выполняются с использованием технологической схемы, показанной на рис. 36.

Рис. 36. Технологическая схема камеральных работ с целью создания цифровых топографических планов и чертежей по данным наземного лазерного сканирования
Отличие технологических схем, представленных на рис. 34, 35 и 36, заключается в разных подходах к обработке данных наземного лазерного сканирования.
Векторизация точечной модели для создания цифровых топографических планов и чертежей выполняется в следующей последовательности:
а) рисовка сооружений и крупных объектов. На начальном этапе рекомендуется на плане отобразить крупные площадные объекты, такие как здания, сооружения и т. д., которые надежно дешифрируются по точечной модели без применения абрисов;
б) векторизация линейных объектов, например трубопроводов, кабельных каналов, ЛЭП и т. д. Для надежного дешифрирования таких объектов необходимо использовать абрисы, составленные на этапе проведения полевых работ, а также другие документы, например, ранее созданные топографические планы на данную территорию, технологические схемы объектов и др.;
в) нанесение точечных объектов, таких как канализационные люки, колодцы связи, пожарные гидранты и др. Как правило, пространственное положение объектов, выступающих над землей менее чем на 1 см, рекомендуется определять геодезическими методами, например, с помощью электронного тахеометра;
г) отображение рельефа. Способ построения рельефа зависит от загруженности топографического плана. Если топографический план имеет большую плотность контуров, то рельеф отображается в виде точек с отметками, во всех остальных случаях – горизонталями и другими условными знаками.

Оформление цифрового топографического плана и создание базы данных.
Для окончательного оформления топографического плана целесообразнее использовать программы САПР или ГИС.
Оценка точности создания топографического плана по данным наземного лазерного сканирования осуществляется аналогично, как и оценка точности создания цифровых моделей местности.
2.2. Сущность внешнего ориентирования сканов
Одним из важных этапов в технологии наземного лазерного сканирования является внешнее ориентирование сканов. От точности выполнения этого процесса зависят окончательная точность построения цифровой модели ситуации и рельефа [47], качество дешифрирования точечной модели и возможность автоматизации процесса построения ЦММ. На рис. 37 показаны точечные модели дымоходной трубы (вид сверху), полученные по 6 сканам, внешнее ориентирование которых выполнено с различной точностью.
Рис. 37. Влияние точности внешнего ориентирования сканов на дешифровочные свойства массива точек: а – средняя СКО единицы веса 4 мм; б
–средняя СКО единицы веса 7 см
Вобщем случае задача преобразования координат точек из одной системы координат в другую выполняется при помощи известной в математике формулы
[126–128]:
X вн |
X 0 |
X |
|
Yвн |
Y 0 |
A Y , |
(35) |
Zвн |
Z0 |
Z |
|
где Xвн, Yвн, Zвн – координаты точек скана во внешней системе координат, которая может быть геодезической или условно заданной в зависимости от решаемой задачи;
X, Y, Z – координаты точек скана в системе координат сканера;
X0, Y0, Z0 – координаты начала системы координат ОXYZ скана во внешней
системе ОXвнYвнZвн;
A – матрица направляющих косинусов, определяющих ориентацию системы координат ОXYZ относительно ОXвнYвнZвн, которая в общем случае имеет следующий вид:

a1 |
a2 |
a3 |
|
|
A b1 |
b2 |
b3 |
, |
(36) |
c1 |
c2 |
c3 |
|
|
где a1, a2, a3, …, c3 – направляющие косинусы, являющиеся функциями углов Эйлера ε, η, ξ.
Из выражений (35) и (36) видно, что для преобразования координат точек сканов из одной системы в другую необходимо знать параметры X0, Y0, Z0, ε, η, ξ. В практике выполнения топографо-геодезических работ существует два метода определения величин X0, Y0, Z0, ε, η, ξ , которые условно можно назвать следующим образом:
прямой (инструментальный); аналитический (см. раздел 2.6).
2.3.Методы внешнего ориентирования сканов
Всистемах наземного лазерного сканирования в настоящее время реализуются оба метода внешнего ориентирования сканов: прямой и аналитический.
Прямой метод определения элементов внешнего ориентирования сканов предусматривает использование дополнительных устройств и приборов и может быть реализован в двух вариантах.
Впервом варианте линейные элементы внешнего ориентирования сканов
X0, Y0, Z0 определяются в результате центрирования сканера с помощью отвеса над точкой, координаты которой известны во внешней системе координат после предварительного горизонтирования прибора и измерения его высоты. В современных аппаратных средствах для центрирования обычно применяется лазерный отвес. Средняя погрешность центрирования, а, следовательно, и
определения элементов X0, Y0 при помощи лазерного отвеса составляет от 1,5 до 2 мм [92], а средняя ошибка определения величины Z0 – от 3 до 5 мм.
Координаты точек стояния сканера могут быть определены в процессе работ по наземному лазерному сканированию на основе геодезических построений или с помощью спутниковой геодезической аппаратуры. Точность определения пространственных координат точек местности спутниковыми методами приведена в табл. 2.
Угловые элементы внешнего ориентирования скана можно задать в процессе горизонтирования сканера, когда вертикальная ось прибора устанавливается в отвесное положение (параллельно оси Z внешней системы координат). Вследствие этого продольный ε и поперечный η углы наклона скана будут равны нулю. Угол разворота ξ скана вокруг оси Z относительно внешней системы координат определяется при ориентировании лазерного сканера по заданному направлению.
Вназемных лазерных сканерах также, как и в современных геодезических приборах, например электронных тахеометрах, для точного горизонтирования используются двухосевые компенсаторы, точность работы которых в настоящее время колеблется от 1 до 5″. Ориентирование прибора по начальному

направлению выполняется с погрешностью такой же, как измерения горизонтальных углов. Для НЛС эта величина варьируется от 3 до 10″.
Таблица 2. Погрешности определения пространственных координат точек спутниковыми методами [122]
Наименование |
Погрешности координат |
||
метода |
Фазовые измерения |
Кодовые измерения |
|
|
|
|
|
|
|
- PPS 2–18 м; |
|
|
- решение с точными |
- SPS без режима SA |
|
Абсолютный метод |
4–40 м; |
||
|
эфемеридами 0,6–4 см |
- SPS с режимом SA |
|
|
|
12–100 м |
|
|
|
|
|
|
- статика |
|
|
|
(фиксированное |
|
|
Дифференциальный |
решение) (0,1 – 1) + |
- DGPS по коду, |
|
(относительный) |
D 10-7 см; |
сглаженному фазой |
|
- статика (плавающее |
0,2–1 м; |
||
метод |
|||
решение) 7–50 см; |
- DGPS 0,6–5 м |
||
|
|||
|
- кинематика RTK, |
|
|
|
VRS 0,6–5 см |
|
|
Втом случае, если сканеры не имеют устройств для горизонтирования, то угловые элементы внешнего ориентирования сканов можно определить при помощи инклинометров и инерциальных геодезических систем, описание принципа действия и точностных характеристик которых представлено в разделе 2.5.
Второй вариант прямого метода внешнего ориентирования сканов основан
на определении элементов X0, Y0, Z0, ε, η, ξ непосредственно в процессе сканирования объекта с помощью подвижной наземной сканирующей системы, включающей носитель, на котором размещены и жестко связаны между собой лазерный сканер, спутниковая и инерциальные системы и служба времени.
Втабл. 3 приведены преимущества и недостатки инструментального и аналитического методов внешнего ориентирования сканов.
Таблица 3. Достоинства и недостатки методов внешнего ориентирования сканов
Наименование |
Преимущества |
Недостатки |
|
- возможность наклона |
- необходимо наличие электронного |
|
вертикальной оси вращения |
тахеометра или других инструментов для |
|
сканера в диапазоне от 0 до |
определения координат центров |
|
180º, что позволяет |
специальных марок; |
|
оптимизировать процесс |
- более сложное программное обеспечение |
|
организации лазерного |
для определения элементов внешнего |
Аналитический |
сканирования; |
ориентирования сканов; |
|
- менее жесткие требования к |
- значительно тяжелее вес комплекта |
|
размещению соседних |
оборудования для сканерной съемки (НЛС, |
|
сканерных станций, что |
аккумулятор, комплект специальных марок, |
|
позволяет более просто |
электронный тахеометр, два штатива и при |
|
исключить «мертвые зоны» при |
необходимости ноутбук). В среднем |
|
съемке объекта; |
комплект оборудования тяжелее на 13–18 |
|
- проще выполняется |
кг, чем при прямом методе внешнего |
|
проектирование сканерных |
ориентирования сканов |
|
станций (нет необходимости |
|
|
обеспечения оптимального |
|
|
расстояния и видимости между |
|
|
соседними станциями) |
|
|
- сокращение времени работы |
|
|
на сканерной станции; |
|
|
- нет необходимости |
|
|
использования |
|
|
вспомогательного |
- трудности размещения НЛС при съемке |
|
оборудования и |
сложных технологических и высотных |
Инструмен- |
дополнительных геодезических |
конструкций; |
тальный |
инструментов (электронного |
- невозможна оценка точности определения |
|
тахеометра и специальных |
элементов внешнего ориентирования |
|
марок); |
сканов |
|
- легче комплект оборудования |
|
|
для сканерной съемки (НЛС, |
|
|
аккумулятор, штатив и при |
|
|
необходимости ноутбук) |
|
Вопросы оценки точности определения элементов внешнего ориентирования сканов обоими методами рассмотрены в разделе 2.6.
Анализ данных, приведенных в табл. 3, позволяет сделать вывод, что для определения элементов внешнего ориентирования сканов в сканерных системах должны быть реализованы оба метода, что дает возможность оптимальнее проводить сканерную съемку.
2.4.Методы прямого определения линейных элементов внешнего ориентирования сканов
Первый вариант прямого метода определения линейных элементов внешнего ориентирования сканов хорошо известен и описан в большом количестве источников, например [8, 29, 46, 68, 91 и др.], поэтому в данной работе не приводится.
Использование спутниковых геодезических технологий для определения линейных элементов внешнего ориентирования сканов в момент съемки сокращает время выполнения работ по сканированию объекта, а также позволяет отказаться от процесса создания рабочего съемочного обоснования.
В данной работе будут использоваться термины «спутниковые геодезические системы» и «инерциальные геодезические системы» вместо часто употребляемых в литературе терминов «спутниковые навигационные системы» и «инерциальные навигационные системы» соответственно. Такая замена связана с понятием «навигация», которая представляет собой науку о способах выбора пути и методах вождения судов, летательных аппаратов и т. д. Задачей навигации является нахождение оптимального маршрута, направления и значения скорости и других параметров движения объекта [48], позволяющих определить его местоположение с погрешностью в несколько метров и более. Инерциальные геодезические и спутниковые геодезические системы должны обеспечивать точность нахождения элементов внешнего ориентирования

сканов, гарантирующую определение пространственных координат точек местности, с ошибкой не более одного метра. Для получения линейных элементов внешнего ориентирования сканов с такой точностью следует применять спутниковые геодезические приборы, в которых реализованы фазовые методы измерения. Этот тип инструментов и будет рассмотрен в данной работе.
В основу идеи общедоступных спутниковых технологий заложена глобальная трилатерация, в которой для измерения расстояний используется радиодиапазон (рис. 38). В настоящее время полноценно функционирует спутниковая геодезическая система NAVSTAR GPS (США) и вводится система ГЛОНАСС (Россия) [122, 123].
Рис. 38. Принципиальная схема спутникового метода измерения расстояний
В основе работы односторонних спутниковых дальномерных систем, в которых реализован фазовый метод определения расстояний от спутников до пользовательского приемника , положена формула [5, 14, 123]:
|
|
|
f |
N f |
, |
(37) |
|
|
|
|
|||
|
|
|
v |
|||
|
|
|
|
|
|
|
где |
Ф – измеряемое значение разности фаз; |
|||||
f |
– номинальное значение масштабной (несущей) частоты; |
|||||
v |
– |
скорость |
прохождения |
радиосигналом дистанции от спутника до |
||
приемника;
N – целое число периодов изменения фазы за время прохождения радиосигналом пути от спутника до приемника;
 – поправка, обусловленная несинхронностью хода часов на спутнике и
– поправка, обусловленная несинхронностью хода часов на спутнике и
приемнике. |
|
|
|
|
|
|
|
|
|
|
|
|
|
В общем виде уравнение для измеряемых псевдодальностей Ri |
можно |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
записать следующим образом [122, 159]: |
|
|
|
||||||||||
Ri |
i |
vdt |
A |
vdti |
I i |
T i |
d |
A |
d i |
dmi |
ei , |
(38) |
|
A |
A |
|
|
A |
A |
|
|
A |
A |
|
|
||
где |
i – геометрическая дальность; |
|
|
|
|||||||||
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
dt A , |
dt i |
– |
сдвиги |
шкал |
часов |
(поправки |
часов), соответственно, для |
||||||
приемника и для спутника;