

Лазерное сканирование 2014 / Литература Лекции / Середович В.А., Комиссаров А.В., Комиссаров Д.В., Широкова Т.А. Наземное лазерное сканирование. 2009
.pdfВлияние таких характеристик объекта, как форма, цвет и структура, учитывать в реальных условиях сканирования очень сложно, поэтому трудно сделать однозначные выводы о точности получения данных сканирования того или иного объекта. Эту задачу можно решить, применяя методы математического моделирования процесса сканерной съемки конкретных объектов с использованием формулы (30).
1.5.5.Влияние параметров сканирования и характеристик сканеров на точность получения данных
При выполнении сканерной съемки необходимо выбирать инструмент, параметры и технологию сканирования, позволяющие в дальнейшем создать модель объекта местности и рельефа с заданной точностью и детальностью.
Определяющими характеристиками наземного лазерного сканера являются:
 максимальное вертикальное и горизонтальное разрешение сканирования;
максимальное вертикальное и горизонтальное разрешение сканирования;
длина волны лазерного излучателя; точность измерения расстояний, вертикальных и горизонтальных углов; расходимость лазерного луча.
В курсе физики используют два понятия расходимости лазерного луча. В первом случае имеют в виду плоский или телесный угол Q или Qs, определяющий ширину диаграммы направленности в дальней зоне по заданному уровню углового распределения энергии или мощности, отнесенному к его максимальному значению. Чаще всего значение уровня принимается равным 0,5 и 1/e2. Это понятие характеризует излучение одномодового лазера, т. е. распределение, близкое к гауссовому, применяемое в наземных сканерах.
Если проводить аналогию НЛС со съемочными системами, то первые три характеристики будут определять геометрическую точность построения скана, а последняя – разрешающую способность системы, так как эта величина показывает минимальный размер объекта при заданном удалении его от сканера для однозначного нахождения максимума функции входного сигнала. Разрешающая способность системы в меньшей степени зависит от разрешения сканирования, чем от расходимости лазерного луча, поскольку при уменьшении значения углового шага сканирования увеличивается зона перекрытия двух соседних лазерных лучей, как показано на рис. 26.
Разрешающая способность лазерных сканеров в основном зависит от расходимости лазерного луча. Из рис. 26 и прил. 1 можно сделать вывод, что угловое разрешение имеет меньшую величину, чем расходимость лазерного луча. Это означает, что при заданной расходимости лазерного луча в конкретном сканере нельзя получить на скане мелкие детали объекта только за счет повышения разрешения сканирования.

а |
б |
Рис. 26. Трактовка разрешающей способности НЛС: а – максимальное разрешение сканирования; б – минимальное разрешение сканирования
Как известно из курса физики, различные материалы по-разному отражают излучения той или иной длины волны. Поэтому будут индивидуальны регистрируемые сканером интенсивности отраженных сигналов определенной длины волны. Это свидетельствует о разных амплитудах и фронтах волн принимаемых сигналов. В свою очередь, от крутизны фронта волны зависит, насколько правильно можно установить моменты времени начала и окончания поступления лазерного импульса на приемник, что непосредственно влияет на ошибки измерения расстояний.
Поскольку по результатам наземного лазерного сканирования в дальнейшем восстанавливается трехмерная или двумерная модель местности, то для правильного ее описания необходимо, чтобы от каждого объекта съемки отразилось как можно больше лазерных импульсов, количество которых зависит от разрешения сканирования.
2.ТЕХНОЛОГИЯ И ТОЧНОСТЬ НАЗЕМНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ
2.1.Технологические схемы наземного лазерного сканирования
Внастоящее время нет запатентованной технологии выполнения работ по наземной лазерной съемке с целью построения трехмерных моделей местности и создания топографических планов и двумерных чертежей участков сканирования. Авторами были выполнены производственные работы по наземной лазерной съемке различных объектов и территорий общей площадью в несколько тысяч гектаров, на основе чего разработана технология выполнения съемки и создания цифровых моделей объектов и рельефа, представленная на рис. 27.
Рассмотрим сущность и особенности выполнения каждого процесса наземной лазерной съемки.
Составление технического проекта. На этапе составления технического проекта регламентируются требуемая точность построения трехмерной модели местности (объекта) или цифрового плана, содержание и детализация их, необходимый формат (расширение) готовой продукции, используемое оборудование, стоимость проведения работ. При необходимости уточняются вопросы о дополнительной семантической информации на каждый объект.
Рекогносцировка местности. С учетом конкретных условий местности выбирается рациональный способ создания и сгущения съемочного обоснования. Также во время рекогносцировки намечаются точки расположения сканера, места размещения специальных марок, уточняются сроки проведения работ и т. п.
Количество и расположение сканерных станций проектируется, исходя из требований обеспечения необходимой точности создания продукции по сканам, производительности и экономичности работ.

Рис. 27. Технология построения трехмерных моделей местности и создания цифровых топографических планов по данным наземного лазерного сканирования
Выбор сканерных станций должен обеспечивать отображение на одном скане максимальной площади снимаемой территории. В связи с этим сканер необходимо располагать примерно на высоте 30 м относительно снимаемой территории, но такое размещение прибора требует дополнительных дорогостоящих устройств. Из рис. 28 видно, что величина линейного шага сканирования по вертикали (lверт) будет меньше с увеличением высоты стояния сканера относительно снимаемой поверхности. Таким образом, увеличение превышения сканера над объектом съемки позволяет увеличить обзор области сканирования и плотность расположения точек на скане, что значительно повышает информативность точечной модели. На графике (рис. 29) показаны значения lверт в зависимости от высоты стояния сканера h, полученные по формуле
lверт |
h tg arctg |
S |
S , |
(31) |
|
h |
|||||
|
|
|
|
где S – расстояние от сканера до объекта съемки; Δθ – угловой шаг сканирования по вертикали.

Рис. 28. Зависимость линейного шага сканирования по вертикали от высоты сканера относительно снимаемого объекта
Величина линейного шага сканирования по горизонтали (lгор) практически не зависит от высоты стояния сканера, а зависит только от углового шага сканирования по горизонтали и отстояния объекта съемки от НЛС, о чем свидетельствует формула
lг ор 2 S 2 h2 sin |
|
. |
(32) |
|
2 |
||||
|
|
|
Рис. 29. Изменение lверт в зависимости от h при S = 50 м и |
= 0,1º |
Отстояние сканерных станций друг от друга при съемке объектов с целью создания трехмерных моделей, как правило, составляет 20–30 м, а в некоторых случаях и меньше в зависимости от сложности объекта.
По завершении рекогносцировки составляются абрисы на снимаемую территорию, фрагмент которых показан на рис. 30. От полноты абрисов зависит достоверность дальнейшего распознавания объектов съемки при дешифрировании точечной модели в камеральных условиях.
При съемке малозастроенных территорий абрисы лучше составлять по точечной модели объекта (полученной после наземного лазерного сканирования), распечатанной на бумаге в ортогональной проекции, аналогично тому, как выполняется полевое дешифрирование объектов по фотопланам. Такой подход позволяет упростить процесс составления абрисов, так как на скане будут отображены все объекты в едином масштабе, и его необходимо дополнить только семантической информацией.

Рис. 30. Фрагмент абриса
Подготовка планово-высотного обоснования сканерной съѐмки.
Определение координат точек планово-высотного обоснования необходимо для создания трехмерных моделей и крупномасштабных планов местности в заданной системе координат и включает следующие процессы:
 составление проекта сети основного и рабочего планово-высотного обоснования;
составление проекта сети основного и рабочего планово-высотного обоснования;
закрепление точек основного планово-высотного обоснования; полевые измерения по планово-высотной привязке точек основного
обоснования;
 камеральная обработка, включающая следующие этапы: уравнивание результатов полевых измерений и составление каталога координат точек основного планово-высотного обоснования;
камеральная обработка, включающая следующие этапы: уравнивание результатов полевых измерений и составление каталога координат точек основного планово-высотного обоснования;
оценка точности создания основного съемочного обоснования; создание рабочего планово-высотного обоснования.
С учетом конкретных условий местности выбирается рациональный способ создания основного и рабочего съемочного обоснования. Практический опыт показал, что при наземной лазерной съемке координаты точек основной опорной сети следует определять с помощью спутниковых геодезических технологий и геодезических построений (проложением теодолитных или полигонометрических ходов, прямой или обратной засечкой). В случае геодезических построений отметки точек основной высотной сети определяются тригонометрическим или геометрическим нивелированием.
Вычисление координат точек основного съемочного обоснования и оценка точности его создания осуществляются в зависимости от выбранного способа координатной привязки и программного обеспечения.
При использовании RTK-режимов (real time kinematic) спутниковой геодезии для определения координат точек основного планово-высотного обоснования процесс камеральной обработки измерений сводится к минимуму, что позволяет в процессе выполнения полевых работ получать

пространственные координаты точек, которые записываются в контроллер приемника. Описание RTK-режима подробно описано в работе [6].
Оценка точности создания основного планово-высотного обоснования выполняется по невязкам. В случае применения GPS-технологий для определения координат точек основной опорной сети апостериорная оценка точности выполняется с использованием алгоритмов, заложенных в программном обеспечении, с помощью которого производилась обработка спутниковых геодезических измерений.
С пунктов основной опорной сети определяются координаты точек рабочего съемочного обоснования, которые проектируются на расстоянии от 2 до 50 м вокруг точек стояния сканера. В качестве точек рабочего съемочного обоснования используются специальные марки, координаты которых рекомендуется определять электронным тахеометром в безотражательном режиме.
При создании рабочего съемочного обоснования сканерной съемки специальные марки следует располагать по схеме, показанной на рис. 31, обоснование которой приведено в разделе 2.6. Специальные марки рекомендуется размещать парами по окружности через 90 . Как показал практический опыт, использование такой геометрии расположения и количества марок (см. рис. 31) позволяет сократить затраты времени на их расстановку, подготовку рабочего планово-высотного обоснования сканерной съемки и непосредственно сканирование.
Рис. 31. Схема расположения специальных марок относительно сканера
В случае, если наземный лазерный сканер снабжен устройствами центрирования и горизонтирования, необходимость создания рабочего съемочного обоснования сканерной съемки отпадает. При этом точки основного съемочного обоснования будут одновременно являться сканерными станциями и проектируются аналогичным образом, как и при тахеометрической съемке.
Трехмерное наземное лазерное сканирование. Порядок работы на сканерной станции состоит из следующих этапов:
1)установка сканера на запроектированной точке на штатив, высота которого задается такой, чтобы обеспечить максимальный охват интересующей территории (объекта) на одном скане;
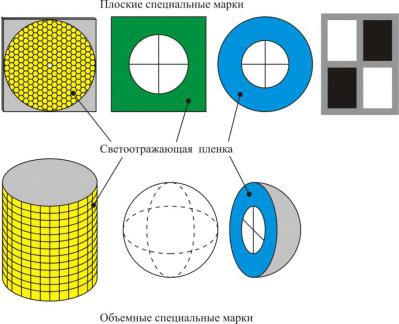
2)расстановка вокруг сканера специальных марок, которые являются точками рабочего съемочного обоснования. Виды специальных марок представлены на рис. 32. Плоские марки обычно используются для ориентирования сканов относительно внешней системы координат, объемные марки – для взаимного ориентирования (подсоединения) сканов;
Рис. 32. Виды специальных марок
3)определение координат центров специальных марок с точек основной опорной сети. Оценку точности создания рабочего обоснования можно выполнить путем многократного измерения центров специальных марок или определением координат одних и тех же марок с различных пунктов основного съемочного обоснования (аналогичным образом, как и при оценке точности тахеометрической съемки);
4)сканирование местности и объектов вокруг точки стояния сканера. Если сканер снабжен цифровой камерой, то выполняется также цифровая съемка;
5)идентификация и определение приближенных координат центров специальных марок с целью дальнейшего быстрого определения области их положения на скане. В зависимости от модели сканера, эти операции выполняются либо по полученному скану, либо по цифровому снимку, если сканер оснащен цифровой камерой;
6)сканирование специальных марок с максимальным разрешением, что позволяет с предельно возможной точностью для данной модели сканера определять их координаты в системе координат скана;
7)перемещение сканера на следующую точку сканирования и повторение этапов 1–6.

Для съемки инженерных объектов с целью создания трехмерных моделей разрешение сканирования следует задавать в соответствии с формулой:
|
|
180d |
, |
(33) |
|
|
|
||
|
1,41 S |
|
||
где |
φ, θ – разрешение сканирования по горизонтали и вертикали; |
|||
d – |
минимальный размер детали объекта, которая должна быть отображена |
|||
на трехмерной модели;
S – расстояние от точки стояния сканера до объекта съемки.
Угловое разрешение при наземной лазерной съемке с целью создания крупномасштабных планов задается одинаковое на каждой станции и определяется следующими факторами:
техническими характеристиками сканера; сложностью объектов;
детальностью окончательной продукции, которая должна удовлетворять заданным требованиям;
 производительностью (снимаемой площадью за рабочий день) и оперативностью работ (временем работы на одной станции).
производительностью (снимаемой площадью за рабочий день) и оперативностью работ (временем работы на одной станции).
Из практического опыта выполнения работ по наземной лазерной съемке с целью создания крупномасштабных топографических планов рекомендуется выбирать следующие параметры при сканировании:
 для инженерных сооружений сканерные станции следует располагать на расстоянии 50–60 м друг от друга. Если съемка производится путем проложения сканерного хода (раздел 2.7), то станции рекомендуется размещать на расстоянии примерно 30 м. Разрешение сканирования следует задавать 0,1 ± 0,02º по горизонтали и вертикали;
для инженерных сооружений сканерные станции следует располагать на расстоянии 50–60 м друг от друга. Если съемка производится путем проложения сканерного хода (раздел 2.7), то станции рекомендуется размещать на расстоянии примерно 30 м. Разрешение сканирования следует задавать 0,1 ± 0,02º по горизонтали и вертикали;
 для открытой местности (без сооружений и коммуникаций) сканерные станции предпочтительнее устанавливать на расстоянии 150–200 м, если дальность действия сканера составляет 200 м и более. В противном случае станции следует располагать на отстоянии друг от друга, на превышающем величины, определяемой по формуле
для открытой местности (без сооружений и коммуникаций) сканерные станции предпочтительнее устанавливать на расстоянии 150–200 м, если дальность действия сканера составляет 200 м и более. В противном случае станции следует располагать на отстоянии друг от друга, на превышающем величины, определяемой по формуле
Dmax 0,636Rmax , |
(34) |
где Rmax – максимальная дальность действия НЛС при отражающей способности объектов от 4 до 20 %.
Геометрическая сущность зависимости Dmax от Rmax показана на рис. 33.
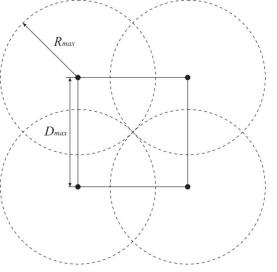
Рис. 33. Зависимость отстояния сканерных станций от дальности действия НЛС:
 – места расположения сканерных станций;
– места расположения сканерных станций;
 – область действия сканера Разрешение при сканировании открытых территорий следует задавать от
– область действия сканера Разрешение при сканировании открытых территорий следует задавать от
0,08 до 0,09º по горизонтали и вертикали. Если в сканере реализован непрерывный режим сканирования (например, в НЛС фирмы Riegl, Zoller+Fröhlich и др.), то разрешение сканирования по вертикали можно увеличить до 0,06–0,07º. При этом сканер надо устанавливать не ниже, чем на 2 м от поверхности земли. Указанные параметры сканирования рекомендуется задавать и при съемке с целью создания цифровой модели рельефа.
Камеральные работы. Камеральная обработка данных наземного лазерного сканирования с целью создания трехмерной векторной модели объектов ситуации выполняется по одной из технологий, представленных на рис. 34, 35.