

Основные характеристики пакета имитационного моделированияeM-Plant
История продукта
В 1986 году немецкая научно-исследовательская организация им. Фраунгофера IPAразрабатывает объектно-ориентированную, иерархическую программу имитационного моделирования с применением языка программированияC++ дляAppleMacintoshпод названиемSIMPLEMacforAppleMacintosh. В 1990 г. была основана компания AIS (нем.AngewandeInformationsSysteme), которой был создан продуктSIMPLE++ ((нем.SimulationinProduktionLogistikundEngineering— симуляция в производственной логистике и проектировании). В 1991 г. КомпанияAISполучила названиеAESOP(AngewandeEDV-SystemezuroptimiertenPlanung). 21 октября 1997 году AESOP была куплена компанией Tecnomatix Technologies Ltd. В 2000 году продукт SIMPLE++ был переименован в eM-Plant в рамках корпоративного ребрендинга. В начале 2005 года компания TECNOMATIX была поглощена компанией UGS_Corp., и получила статус отдельного подразделения. Год спустя продукт eM-Plant был переименован и стал называться Tecnomatix Plant Simulation Tool. В январе 2007 году компания UGS была приобретена концерном Siemens AG. C этого момента поставки и поддержка решений Tecnomatix осуществляются компанией Siemens PLM Software, которая вошла в состав подразделенияSiemensIndustryAutomationDivision.
Сегодня пакет eM-Plantактивно используют несколько сотен предприятий, расположенных преимущественно на европейском континенте. В частности, работы с использованием пакетаeM-Plantпостоянно выполняются во всех автомобилестроительных концернах Германии.
Описание продукта
Пакет eM-Plantявляется стандартным программным обеспечением для решения задач моделирования, имитации, анимации и оптимизации физических (материальных) процессов в самых различных производственных и логистических системах, а также бизнес-процессов в таких системах. При его разработке в полной мере была реализована концепция объектной ориентации, включающая в себя иерархичность, наследование и полиморфизм. На этой базе был создан удобный графический интерфейс разработчика моделей, эффективный внутренний язык программирования, а также средства для интеграции пакета в информационных системах, предназначенных для планирования и управления производственными и логистическими процессами.
Метод создания моделей
Графической формой представления модели является сетевая структура, создаваемая, как правило, разработчиком модели на базе стандартных объектов, содержащихся в библиотеке классов симулятора (ClassLibrary). Замечание «как правило» сделано в связи с тем, что в составе внутренного языка программирования SimTalk имеются средства для автоматической генерации моделей путём проведения диалога с пользователем или на базе текста готовой спецификации модели. В обычном же случае разработчик модели выполняет следующие действия:
разрабатывает концептуальную модель системы и эскиз её сетевой структуры «на бумаге»
выбирает статические объекты (блоки) eM-Plantв библиотеке классов и составляет из них структуру реальной модели на экране компьютера
путём использования объектов типа Connectorсвязывает между собой блоки модели, предназначенные для обработки подвижных объектов, которые вeM-Plantназываюся Moving Units (MUs)
открывает диалоговое окно каждого блока модели, при необходимости расширяет список атрибутов блока и вводит численные значения его параметров и атрибутов (диалог может не проводиться для тех блоков, которые являются копиями уже предварительно «настроенных» блоков)
назначает форматы данных для информационных блоков модели (глобальных переменных, таблиц и списков) и при необходимости вводит в них исходные данные
с использованием языка SimTalk создаёт объекты типа Method, т.е. пишет тексты собственных управляющих программ и программ сбора статистических данных
с использованием языка SimTalk пишет тексты программ для методов reset,initиendsim, которые автоматически вызываются на соответствующих стадиях прогона модели
вводит в состав модели блок EventController и при необходимости задаёт в нём параметры прогона модели (например, скорость моделирования и длительность прогона)
с помощью диалогового окна блока EventController управляет прогонами модели

Рис. 1: Библиотека объектов eM-Plant
На Рис. 1 показана библиотека объектов (классов) eM-Plant(версия 4.6), которая состоит из трёх разделов:
раздел MaterialFlow
объекты, используемые для создания модели как целостной структуры: Connector, EventController,Frame,Interface
статические объекты (блоки), предназначенные для обработки подвижных объектов: Source, Drain, SingleProc, ParallelProc, Assembly, DismantleStation, Store, Buffer, Sorter, Line, Track, FlowControl, Broker, Exporter
подвижные объекты: Entity, Container, Transporter
раздел InformationFlow
объекты для поддержки программ разработчика модели: Method,Variable,Comment
списки и таблицы: TableFile, CardFile, StackFile, QueueFile, TimeSequence
средства программирования регулярных событий: Trigger,Generator
средства обмена данными с другими программами: FileInterface,FileLink
раздел UserInterface
объекты для графического отображения текущих данных и результатов моделирования: Gauge,Plotter,Chart
объекты для конструирования диалогов пользователя: Dialog,IDMInterface
Краткое описание подвижных объектов и почти всех статических объектов (блоков), предназначенных для обработки подвижных объектов, можно найти в Таблице 1. Самые простые сетевые модели могут быть созданы без программирования на языке SimTalk, т.е. без применения объектов типа Method, однако такие модели никогда не встречаются в практике моделирования реальных систем. Примеры сетевых моделей, созданных наeM-Plant, показаны на Рис. 3 и 4.
Принципы появления и обработки событий в сетевой модели
Событие в сетевой модели чаще всего происходит тогда, когда какой-то подвижный объект пытается покинуть блок, в котором он находился до данного момента времени, или он уже входит в следующий блок. Если разработчик модели не принял меры для специального управления процессом перехода объекта из блока в блок, то действует основной принцип под названием «передача-блокировка»:
предшественник пытается передать готовый к выходу объект своему последователю
если у последователя есть возможность принять объект, то он принимает его
если у последователя такой возможности нет, предшественник продолжает попытки передать объект во все последующие моменты модельного времени до тех пор, пока ему не удастся передать объект
Часто у разработчика модели появляется необходимость «перехватывать» события определённого типа, чтобы выполнять действия по управлению моделью или фиксировать статистические данные. Для этого он должен связать каждое интересующее его событие с собственной программой, присутствующей в модели в виде объекта типа Method. Симулятор eM-Plant позволяет сделать это в диалоговом окне того блока, в котором появляется соответствующее событие. В разделе Controls этого окна разработчик модели может указать имя программы, которая должна вызываться при любом из показанных на Рис. 2 типе события. Важнейшим является событие, при котором объект пытается покинуть блок. Только при обработке этого типа события (например, с помощью программы Exit_Front на Рис. 2) у разработчика модели появляется возможность назначить новый блок, к которому должен быть направлен объект, вызвавший данное событие. Во всех других случаях сохраняется возможность лишь зафиксировать информацию о событии или предпринять любые другие действия при предположении, что блок, принявший данный объект, точно известен. Такая возможность обработки событий имеет особое значение в случаях, когда выполняется моделирование, «ориентированное на длину». При таком моделировании может точно учитываться позиция Front и позиция Rear каждого объекта, который находится внутри блока типа Line или Track (см. Таблицу 1), одним из параметров которых является длина. Длина задаётся также в качестве параметра динамических объектов, проходящих через блоки типа Line или Track.

Рис. 2: Четыре типа событий в сетевой модели eM-Plant
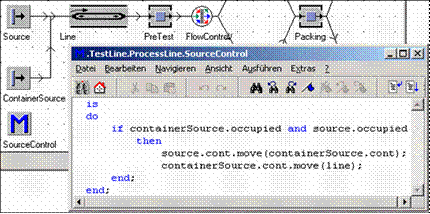
Рис. 3: Фрагмент модели, содержащий объект типа Method
На Рис. 3 показан пример модели, в которой программа SourceControl вызывается каждым объектом, который появляется на выходе источника Source или источника ContainerSource. При этом она работает как программа Exit_Front на Рис. 2 и управляет движением объектов из обоих источников. Если при вызове программы SourceControl в одном из источников находится вызвавший её объект, а в другом источнике объект отсутствует, то никаких действий выполнено не будет и объект останется в своём источнике ожидать появления «парного» объекта. Если при вызове программы SourceControl «парный» объект обнаруживается в другом источнике, то производится «загрузка» объекта, поступившего из блока ContainerSource, и этот загруженный объект-контейнер направляется к блоку Line.
Особенности пакета eM-Plant как программного продукта для имитационного моделирования
Пакет eM-Plantотносится к классу так называемых «индустриальных симуляторов». Отмеченные ниже особенности пакета характеризуют его именно с этой стороны. Именно в условиях производства возникает необходимость создавать в сравнительно короткие сроки большие и сложные модели, которые должны работать в режиме реального времени и взаимодействовать с другими программными продуктами.
Поддержка иерархического принципа создания моделей и возможность расширения библиотеки объектов
Любой связанный фрагмент некой исходной сетевой модели может рассматриваться как
«подмодель», т.е. как модель более низкого уровня иерархии. Этот фрагмент может быть заменён на один новый объект в структуре исходной сетевой модели. У нового объекта должны быть сохранены все входные и выходные связи, которые соединяли заменяемый фрагмент с остальными блоками исходной модели. Новый объект создаётся на базе библиотечного объекта типа Frame, который является графическим окном, предназначенным для создания сетевой модели. В этом смысле любая размещённая в пределах одного графического окна сетевая модель симулятораeM-Plantявляется объектом типаFrame. Таким образом, путём выполнения обычных операций Copy&Paste фрагмент исходной модели может быть размещён в новом (пустом) окне типаFrame, которому даётся при этом произвольное имя. Этот новый объект автоматически появляется в составе библиотеки объектов симулятора. В первую очередь одну его реализацию помещают, конечно, в структуру исходной модели, удаляя при этом заменяемый фрагмент. Начиная с этого момента структура исходной модели становится иерархической, так как в ней находится объект типаFrame, представляющий из себя самостоятельную структуру. Количество уровней иерархии не ограничено, т.е. любой объект типаFrameможет иметь в своей структуре другие объекты типаFrame.
В описанном примере новый библиотечный объект возникает в результате укрупнения некой исходной структуры модели. Конечно, такие объекты разработчик модели может конструировать ещё и до существования общей структуры модели, которую впоследствии можно будет создать именно на базе заранее подготовленных библиотечных объектов типа Frame. Собственную библиотеку объектов типаFrameразработчик модели может развивать так, как он считает нужным. Он может создавать копии или новые поколения объектов, расширять или модифицировать эти объекты с ориентацией на применение в новых моделях.
Последнее высказывание относится также к библиотекам и объектам, которые попадают в руки разработчика модели как «чужие продукты». Таковыми могут быть, например, демонстрационные модели, поставляемые вместе с симулятором, или специализированные библиотеки, предлагаемые фирмой Tecnomatix (см. ниже). Данное свойство симулятора eM-Plantхарактеризует его как открытый продукт, на базе которого пользователи могут создавать собственные библиотеки и специализированные симуляторы.
На Рис. 4 можно видеть три объекта типа Frame, представляющие собой локальные модели. Объекты Strom_LKW и Strom_Schleppzug(слева внизу рисунка) используются как модели источников входных потоков грузовых автомашин. В каждом таком источнике реализуется сложное расписание прибытия автомашин от разных поставщиков и рассчитываются подробные модели для определения состава и объёма груза. ОбъектGMDсодержит полную модель логистических процессов на предприятии, которое является получателем грузов, отправляемых из моделируемого логистического центра. По размеру его сетевая модель сравнима с моделью верхнего уровня, показанной на Рис. 4.
Интерфейс пользователя и программные интерфейсы пакета
С помощью объектов типа Dialog разработчик модели может создавать специальные диалоговые окна, предназначенные для ввода исходных данных, управления процессом моделирования или анализа результатов моделирования. Чаще всего это делается в случаях, когда с моделью должен работать пользователь, не знакомый с базовым интерфейсомeM-Plant. Весь интерфейс пользователяeM-Plantявляется многоязычным. В настоящее время стандартные диалоги поддерживаются на английском, немецком и японском языке. Для создания собственного диалога пользователя на любом другом языке должна быть заполнена текстовыми блоками только одна таблица.
Специальный интерфейс позволяет пользователю автоматически создавать документацию для модели в формате HTML, в состав которой он может включать также материалы, относящиеся к результатам моделирования и ссылки на страницы в Интернете. Полное документирование самой модели и результатов моделирования в формате HTML может производиться также автоматически в любой момент времени при обработке модели.
К интерфейсу пользователя относятся методы визуализации моделируемых процессов. Уже упомянуты были объекты типа Gauge,PlotterиChart.
Анимация процессов в eM-Plantможет быть выполнена на трёх качественно различных уровнях:
отображение дискретных позиций подвижных объектов на фоне сетевой структуры модели (стандартная 2D-анимация, которая не требует никаких усилий от разработчика модели)
отображение напрерывного движения объектов на фоне произвольного графического двумерного изображения модели (2D-анимация, которая может быть создана средствами встроенного графического редактора eM-Plant)
реалистическое отображение движения объектов модели в трёхмерном пространстве (3D-анимация, которая может быть создана с помощью библиотеки трёхмерных объектов, предлагаемой 3D-компонентом самого пакета eM-Plant, или с помощью библиотек типа OpenGL Optimizer)
В последних версиях eM-Plantэффективно могут использоваться специальные объекты (группа Tools), разработанные для поддержки работ по анализу процессов:
BottleneckAnalyzer: поиск «узких мест» в системах обработки материальных потоков на базе визуализации стандартной статистики о загрузке блоков модели
Sankey-Chart: визуализация плотности потоков подвижных объектов, проходящих через выбранные пользователем блоки модели
Для пакета eM-PlantфирмаTecnomatixпоставляет специальные компоненты, расширяющие его функциональные возможности и возможности для программной интеграции с другими продуктами:
eM-PlantActiveX: использованние компонентовActiveXв моделях наeM-Plant
eM-PlantAris: связь с пакетом для моделирования бизнес-процессов фирмы IDS Scheer AG
eM-PlantC: создание программ на языкеCдля вызова из моделей внешних программ в формеDLL
eM-PlantDDE: взаимодействие моделей с другими программами, работающими под Windows
eM-PlantGantt: интерактивная работа с процессами в моделях, изображёнными с помощью диаграмм Ганта
eM-PlantGA: применение генетических алгоритмов для оптимизации процессов, воспроизводимых моделями
eM-PlantODBC: двухстороннее взаимодействие с серверамиODBC, работающими под Windows
eM-PlantSocket: взаимодействие с другими программами в реальном времени на базе протокола TCP/IP
eM-PlantSQL: двухстороннее взаимодействие с банками данных, реализованными с помощью ORACLE
Специализированные наборы объектов
Специализированные наборы (библиотеки) объектов были разработаны с целью ускорить процесс разработки моделей в тех отраслях производства и логистики, где достаточно регулярно возникает необходимость создавать аналогичные по своим функциям модели. Кроме того, как отмечалось выше, такие библиотеки могут использоваться как исходный материал при разработке пользователями собственных специализированных библиотек.
На сегодняшний день фирма Tecnomatixпредлагает следующие специализированные наборы объектовeM-Plant:
eM-Plant AGVS: (Automated Giuded Vehicle System) моделирование мобильных средств перемещения грузов, в особенности, систем робокаров
eM-Plant Airport: моделирование потоков пассажиров на территории аэропорта
eM-Plant Assembly: моделирование, анимация и анализ сборочных процессов
eM-Plant Carbody: моделирование, анимация и анализ процессов на предприятиях автомобилестроительной промышленности (до этапа «покраска кузова»)
eM-Plant Conveyor: моделирование стационарных средств перемещения грузов (конвейерных систем)
eM-Plant EOM: (Electrical Overhead Monorail) моделирование подвесной монорельсовой системы перемещения грузов
eM-Plant HBW: (High Bay Warehouse) моделирование буферных зон и высотных автоматизированных складов
eM-Plant Paintshop: моделирование, анимация и анализ установок для выполнения работ по покраске изделий
eM-Sequencer: решение задач типа «job shop scheduling» на базе применения генетических алгоритмов
eM-Plant Shop: моделирование процессов, протекающих в условиях «мануфактурного» производства

Рис. 4: Фрагмент имитационной модели логистического центра
Таблица 1: Классы объектов для моделирования логистических систем
|
Название класса |
Примеры объектов реального мира или примеры использования в моделях |
|
Динамические объекты | |
|
Entity |
Единица груза, деталь, пассажир. |
|
Container |
Коробка, ящик, поддон, контейнер. |
|
Transporter |
Транспортное средство или мобильное средство перемещения грузов. |
|
Статические объекты | |
|
Source |
Входной поток грузов, товаров, пассажиров или транспортных средств. Поток заявок на выпонение транспортных операций. |
|
Drain |
Граничный объект в структуре, через который динамические объекты покидают модель. |
|
SingleProc |
Ресурс системы, предназначенный для одновременной обработки лишь одного динамического объекта: подъёмный кран, лифтовый подъёмник, робот-манипулятор, станок, рабочее место. |
|
ParallelProc |
Ресурс системы, предназначенный для одновременной обработки нескольких динамических объектов: участок пути с возможностью обгона, параллельно работающие билетные кассы. |
|
Buffer |
Очередь, в которой динамические объекты находятся в состоянии ожидания и из которой они могут выйти самостоятельно при наличии возможности перейти в следующий блок. |
|
Store |
Место хранения динамических объектов, покидать которое они могут только в ответ на поступление соответствующих команд. |
|
Line |
Участок конвейерной системы транспортировки грузов, транспортёр. |
|
Track |
Участок пути, по которому премещаются объекты класса Transporter. Используется как элемент транспортной системы с автоматическим поиском маршрутов. |
|
Assembly |
Рабочее место, на котором происходит объединение нескольких динамических объектов: место сборки изделий, пункт загрузки транспортных средств. |
|
DismantleStation |
Рабочее место, на котором происходит разделение динамических объектов: место разборки изделий, пункт разгрузки транспортных средств. |