

Метода_ТУ
.pdfТема 4 Импеданс динамической системы
Тема 4 Импеданс динамической системы
Анализ различных элементов динамических систем показывает, что разнообразные элементы, отличающиеся назначением, конструкцией, принципом действия и физическими процессами, описываются подобными уравнениями и являются сходными по динамическим свойствам. Рассмотрим понятие импеданса системы как величины, применяющейся для исследования ее динамических свойств.
Электрические системы
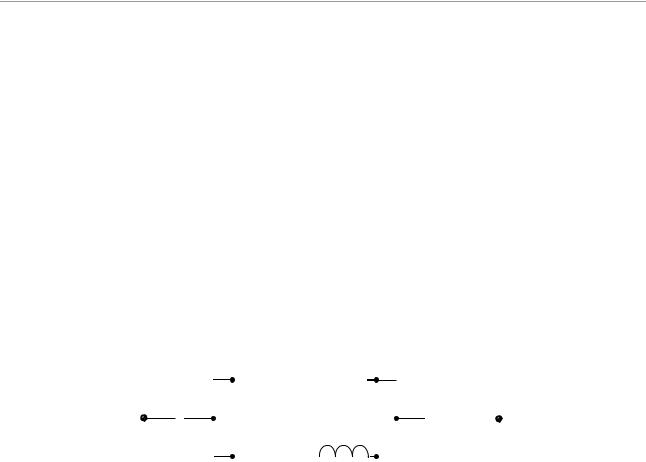
На рис. 4.1 представлены схемы простейших электрических систем: активное сопротивление (резистор), индуктивность (катушка индуктивности),
емкость (конденсатор). Здесь i |
– сила тока в цепи, U – напряжение на концах |
||||||||||||||||||||
цепи, R – сопротивление, L – индуктивность, C – емкость элемента цепи. |
|||||||||||||||||||||
|
|
|
i |
|
|
|
|
|
i |
|
|
|
|
i |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
C |
||||||||||||
|
|
|
R |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
U |
|
U |
|
|
U |
|||||||||||||
|
|
|
а) |
|
б) |
|
|
в) |
|||||||||||||
Рис. 4.1 – Простейшие электрические системы: а) сопротивление; |
|||||||||||||||||||||
|
|
|
|
|
|
б) индуктивность; в) емкость |
|||||||||||||||
Определение. Импеданс |
электрической |
системы равен отношению |
|||||||||||||||||||
Z (p) = U (p ) , где U (p ) = L[u(t )], I (p) = L[i(t )]. I (p )
Рассмотрим нахождение импеданса представленных электрических систем в соответствии с законами электродинамики.
Как известно из курса физики, система «сопротивление» (рис. 4.1, а)
характеризуется |
законом Ома: U (t ) = R i(t ); тогда, взяв преобразование |
||||
Лапласа, получим: |
U (p) = R I ( p) . Таким образом, импеданс сопротивления |
||||
(т. н. операторное сопротивление) равен: |
|||||
Z (p ) = |
U (p) |
|
= |
R I (p ) |
= R . |
I (p ) |
|
||||
|
|
I (p ) |
|||
Для системы |
«индуктивность» (рис. 4.1, б) выполняется соотношение: |
||||
U (t ) = L di (t ), тогда, при нулевых начальных условиях (н. у.), U (p) = LpI (p). dt
20

Тема 4 Импеданс динамической системы
Импеданс индуктивности (операторное сопротивление индуктивности) равен:
Z (p) = |
U (p ) |
|
= |
L p I (p ) |
|
= L p . |
|
||
I (p) |
I (p) |
|
|||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
1 |
t |
|
Для системы |
«емкость» (рис. 4.1, в) справедлив закон: U (t ) = |
∫i(t )dt , |
|||||||
C |
|||||||||
|
|
|
|
|
|
|
0 |
||
тогда U (p) = 1 I (p ). Импеданс емкости (операторное сопротивление емкости)
Cp
равен:
Z (p ) = |
U (p ) |
|
= |
I (p ) |
|
= |
1 |
. |
I (p ) |
Cp I (p) |
|
||||||
|
|
|
Cp |
|||||
Механические системы перемещения
На рис. 4.2 представлены схемы простейших механических систем
перемещения: масса, трение, упругость. Введем обозначения: |
f (t ) – |
прилагаемая сила, x(t ) – перемещение центра масс механической |
системы, |
v(t ) – скорость перемещения, a(t ) – ускорение перемещения, m – масса тела, B – коэффициент демпфирования, k – коэффициент упругости пружины. Будем обозначать преобразования Лапласа указанных функций F (p) = L[ f (t )],
= L[x(t )], V (p) = L[v(t )] и так далее по аналогии.
|
|
|
|
|
x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
f(t) |
|
|
|
|
|
|
k |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) |
|
x(t) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f(t) |
f(t) |
|||||||
|
|
|
|
|
а) |
|
|
|
|
б) |
в) |
|||||||||||
Рис. 4.2 – Простейшие механические системы перемещения: а) масса; |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
б) трение; в) упругость |
|
|
|
|||||||||
Определение. Механический импеданс перемещения – это одно из двух |
||||||||||||||||||||||
отношений Z (p ) = |
F (p ) |
|
(если выходом системы считается скорость v(t )) или |
|||||||||||||||||||
V (p ) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Z (p ) = |
F (p) |
|
(если выходом системы считается перемещение x(t )). |
|||||||||||||||||||
X (p) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Для механической системы «масса» (рис. 4.2 а)) в силу второго закона
21
Тема 4 Импеданс динамической системы
Ньютона при нулевых н. у. имеем: f (t ) = m a(t ) = m |
dv |
= m |
d 2 x |
. |
|||||||||||||
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
dt 2 |
||
Следовательно, F (p ) = mpV ( p) = mp 2 X ( p) . |
|
|
|
|
|
|
|||||||||||
Механический импеданс массы равен: |
|
|
|
|
|
|
|||||||||||
Z (p) = |
F (p) |
|
= mp или Z (p) = |
F (p) |
|
= mp 2 . |
|
|
|
|
|
|
|||||
V (p ) |
X (p) |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для механической системы |
«трение» |
(рис. 4.2 б)) справедливо |
|||||||||||||||
соотношение: |
f (t ) = B |
dx |
= B v(t ) . |
Отсюда |
|
F (p) = B p X (p) = BV (p). |
|||||||||||
|
|
||||||||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|||||
Механический импеданс сопротивления равен: |
|
|
|
|
|
|
|||||||||||
Z (p) = |
F (p) |
|
= B или Z (p) = |
F (p ) |
= B p . |
|
|
|
|
|
|
||||||
V (p ) |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
X (p) |
|
|
|
|
|
|
|
||||||
Для механической системы «упругость» (рис. 4.2 в)) |
в силу закона Гука |
||||||||||||||||
|
|
|
t |
|
|
|
k |
|
|||
имеем: f (t ) = k x(t ) = k ∫ v(τ )dτ . Отсюда F (p) = k X (p) = |
V (p). |
||||||||||
|
|||||||||||
|
|
|
0 |
|
|
|
|
|
p |
||
|
|
|
|
|
|
|
|
|
|
||
Механический импеданс упругости равен: |
|||||||||||
Z (p ) = |
F (p) |
|
= k или Z (p ) = |
F (p ) |
|
= |
k |
. |
|||
X (p ) |
V (p) |
|
|||||||||
|
|
|
p |
||||||||
Между механическими и электрическими системами существует аналогия, определяемая таблицей 4.1.
Таблица 4.1 – Таблица импедансов различных систем
Электрический импеданс |
Механический импеданс перемещения |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Элемент |
Z (p) |
Элемент |
Z (p) = |
F (p) |
|
Z (p) = |
F (p ) |
|
||||
|
|
|
|
X (p ) |
||||||||
системы |
|
|
|
системы |
|
|
V (p) |
|
||||
|
|
|
|
|
|
|
|
|
||||
Индуктивность |
|
Lp |
Масса |
mp |
mp 2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
Конденсатор |
1 |
|
Пружина |
|
k |
k |
||||||
|
|
|
|
|
|
|
|
|||||
|
Cp |
|
p |
|||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
Сопротивление |
|
R |
Демпфер |
|
B |
Bp |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
На основании законов распределения напряжений в цепи при параллельном и последовательном соединениях элементов можно показать, что для электрических сетей при последовательном соединении импедансы
22

Тема 4 Импеданс динамической системы
складываются, |
то есть |
Z = Z1 + K+ Z n , а при |
параллельном соединении |
|||||||
суммируются |
величины, |
обратные импедансам, |
то есть |
1 |
= |
1 |
+ K+ |
1 |
|
|
Z |
Z1 |
Zn |
||||||||
|
|
|
|
|
|
|||||
( Z – импеданс системы, Z1 , …, Zn – импедансы составляющих ее элементов). Кроме того, при решении задач используют законы Кирхгофа:
1)сумма токов (или операторных токов) в каком-либо узле электрической цепи равна нулю;
2)сумма падений напряжений (или операторных напряжений) вдоль любого замкнутого контура равна нулю.
Для решения задачи нахождения выходной величины тока для динамической системы электрической цепи, в которой в качестве входной переменной рассматривается напряжение, необходимо найти импеданс этой цепи (подробнее этот вопрос будет рассмотрен в темах 5 и 6). Для механических систем применяется аналогичный подход (входной переменной является прилагаемая сила, выходной – перемещение или скорость).
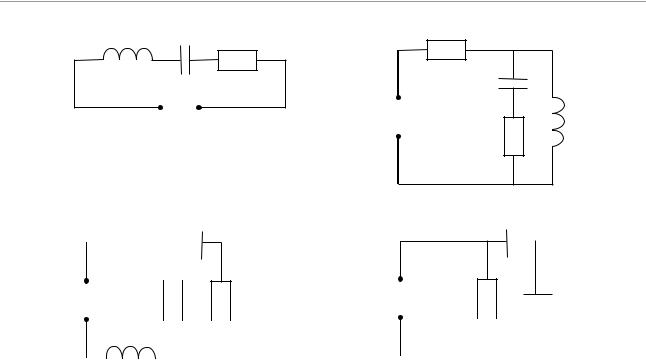
Пример 4.1. Найти импеданс электрической системы (рис. 4.3).
R L C
Рис. 4.3 – Схема динамической системы для примера 4.1
Решение. В данной системе присутствуют 3 элемента (резистор, катушка индуктивности, конденсатор), соединенные последовательно, значит, импеданс системы равен:
Z (p ) = R + Lp + |
1 |
= |
LCp 2 + RCp +1 |
. |
|
|
|||
|
Cp |
|
Cp |
|
Пример 4.2. Найти импеданс механической системы (рис. 4.4).
k
|
m |
f (t ) |
|
||
|
|
|
x(t ), v(t )
Рис. 4.4 – Схема динамической системы для примера 4.2
Решение. В данной системе присутствуют 2 элемента (пружина и масса), соединенные последовательно. Пусть выходом данной системы считается перемещение x(t ), тогда импеданс равен: Z ( p) = mp2 + k + Bp . Если выходом
23

Тема 4 Импеданс динамической системы
считается скорость v(t ), то Z (p) = mp + k + B = mp 2 + Bp + k . p p
Пример 4.3. Найти импеданс электрической системы (рис. 4.5).
R
L
C
Рис. 4.5 – Схема динамической системы для примера 4.3
Решение. В системе присутствуют 3 элемента, соединенные параллельно, значит, импеданс системы Z (p) определяется по формуле:
1 |
|
|
|
1 |
1 |
|
|
|
||
|
|
|
= |
|
|
+ Cp + |
|
; |
|
|
Z (p) |
|
R |
Lp |
|||||||
1 |
|
|
= |
|
Lp + RLCp2 + R |
|||||
|
|
|
|
|
|
|
; |
|||
Z (p) |
|
|
RLp |
|
|
|||||
Z (p) = |
|
|
RLp |
|
. |
|||||
|
|
|
|
|
||||||
|
|
|
|
|
||||||
|
|
|
|
RLCp 2 + Lp + R |
||||||
Пример 4.4. Найти импеданс электрической системы (рис. 4.6).
R C L 4R
Рис. 4.6 – Схема динамической системы для примера 4.4
Решение. В данной системе присутствуют 4 элемента, соединенных последовательно, значит импеданс системы равен:
Z (p) = R + |
1 |
+ Lp + 4R = 5R + |
1 |
+ Lp = |
LCp 2 + 5RCp +1 |
. |
|
|
|
||||
|
Cp |
|
Cp |
|
Cp |
|
Пример 4.5. Найти импеданс электрической системы (рис. 4.7).
|
L |
R |
2C |
1 |
2 |
|
C |
Рис. 4.7 – Схема динамической системы для примера 4.5
24
Тема 4 Импеданс динамической системы
Решение. Найдем |
|
сначала |
|
|
импеданс |
|
на |
участке 1–2, содержащем |
||||||||||||||||||||||||||||||||||||||||||
2 элемента, соединенные параллельно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
1 |
|
= |
|
1 |
+ Cp = |
1 + LCp 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Z12 (p) |
Lp |
|
|
Lp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
Z12 (p) |
= |
|
|
|
Lp |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
1 + LCp 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Так как участок 1–2 последовательно соединен с остальными элементами – |
||||||||||||||||||||||||||||||||||||||||||||||||||
резистором и конденсатором, то импеданс всей цепи будет равен: |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Z (p) = R + Z (p) + |
1 |
= R + |
|
|
|
|
Lp |
|
|
|
+ |
1 |
|
. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
2Cp |
|
|
|
|
|
|
|
|
1 + LCp 2 |
|
|
2Cp |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Пример 4.6. Найти импеданс электрической системы (рис. 4.8). |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
1 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
2 |
|
|
5R |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3R |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Рис. 4.8 – Схема динамической системы для примера 4.6 |
|
||||||||||||||||||||||||||||||||||||||||||||
Решение. Найдем импедансы на участках 3–4 и 5–6: |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Z |
|
(p ) |
= |
|
1 |
+ R = |
1 + RCp |
, |
|
Z |
|
|
(p) = 3R + Lp . |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
34 |
|
|
|
|
|
|
|
56 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
Cp |
|
|
|
|
|
|
|
Cp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Так как участки 3–4 и 5–6 соединены параллельно, то импеданс участка |
||||||||||||||||||||||||||||||||||||||||||||||||||
1–2 найдем по формуле: |
1 |
|
|
|
|
= |
|
|
|
1 |
|
|
+ |
|
|
|
|
1 |
. |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Z |
(p) |
Z |
34 |
(p) |
Z |
56 |
(p) |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
|
= |
|
|
|
1 |
+ |
|
|
1 |
|
= |
|
|
|
Cp |
|
+ |
|
|
|
|
1 |
|
= |
3RCp + CLp 2 + RCp + 1 |
. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
Z12 (p) |
|
Z34 (p) |
|
Z56 (p) |
1 + RCp |
3R + Lp |
|
|
(1 + RCp)(3R + Lp) |
||||||||||||||||||||||||||||||||||||||||
Тогда импеданс всей цепи равен: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
Z (p) = |
1 |
|
+ Z (p) + 5R = |
1 |
|
+ |
(1 + RCp)(3R + Lp) |
+ 5R . |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
Cp |
12 |
|
|
|
|
|
|
|
|
|
|
|
Cp |
|
|
|
CLp 2 + 4RCp + 1 |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Задачи для самостоятельного решения к теме 4
Задача 4.1. Найти импедансы следующих систем:
25
Тема 4 Импеданс динамической системы
а) |
C |
б) |
R |
3L |
2R |
|
|
|
|
|
3C |
|
U |
U |
L |
|
|
||
|
|
|
3R |
|
|
|
|
3C |
3C |
||||
в) |
|
|
г) |
|
|
||||
|
|
|
|||||||
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
R |
|
|
3R |
U |
|
|
|
|
|
|
|
С |
||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
4R |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.9 – Схемы динамических систем для задачи 4.1
Контрольные вопросы к теме 4
Основной уровень
1.Дайте определение импеданса электрической системы; импеданса механической системы.
2.Как рассчитать импедансы простейших электрических и механических элементов систем?
3.Сформулируйте правило расчета импедансов при последовательном и параллельном соединении элементов системы.
Углубленный уровень
1.Как рассчитывается импеданс системы, содержащей последовательно и параллельно соединенные элементы?
2.Какая аналогия существует между элементами электрических и механических систем?
26

|
|
|
Тема 5 Передаточная функция |
Тема 5 Передаточная функция динамической системы |
|||
Рассмотрим линейную стационарную одномерную динамическую систему |
|||
(ДС) с входной переменной |
(входом) y(t ) и выходной переменной |
||
(выходом) x(t ) (рис. 5.1) |
|
|
|
|
|
|
|
|
|
ДС |
|
y(t) |
|
|
x(t ) |
|
|
||
Рис. 5.1 – Обобщенная схема динамической системы
Определение. Передаточная функция W (p ) динамической системы – это отношение преобразованной по Лапласу выходной переменной к преобразованной по Лапласу входной переменной этой системы при нулевых
начальных условиях (н. у.): W (p ) = X ( p) , где X (p) = L [x(t )], Y (p) = L [y(t)].
Y ( p)
Передаточная функция является одним из способов математического описания динамической системы и может быть рассмотрена как дифференциальный оператор, выражающий связь между входом и выходом линейной стационарной системы. При нулевых н. у. дифференциальное уравнение описания ДС и передаточная функция связаны взаимно-однозначно. Зная входной сигнал системы и передаточную функцию, можно восстановить выходной сигнал.
Пример 5.1. Задана динамическая система в виде электрической цепи, причем вход системы – напряжение U1 (t ), выход – напряжение U 2 (t ) (рис. 5.2). Найти передаточную функцию системы и восстановить дифференциальное уравнение описания функционирования системы во времени.
|
|
|
|
i(t ) |
R |
1 |
|
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
U 2(t) |
|||
|
|
|
|
|
|
|
|
|||
|
|
|
U1 (t) |
|
C |
|
||||
|
|
|
|
|
||||||
|
|
|
|
|
||||||
|
|
|
вход |
|
|
выход |
||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Рис. 5.2 – Схема динамической системы для примера 5.1 |
||||||||
Решение. Передаточная функция данной ДС определяется выражением |
||||||||||
W (p) = |
U 2 |
( p) |
при нулевых начальных |
условиях, где U1 (p) = L[U1 (t )], |
||||||
U1 ( p) |
||||||||||
|
|
|
|
|
|
|
|
|||
U 2 (p) = L[U 2 (t )]. Для нахождения передаточной функции будем использовать импеданс системы.
27
Тема 5 Передаточная функция
Рассмотрим импеданс всей системы: Z (p ) = R + 1 = RCp + 1 .
Cp Cp
С другой стороны, по определению импеданса электрических систем,
Z (p) = U1 ( p) , где i ( p)
Выражаем U1
i(p) = L[i(t )], i(t ) – ток в цепи.
( p) : U1 ( p) = Z ( p) i ( p) = RCp + 1 i ( p) .
Cp
Рассмотрим отдельно |
участок |
1–2: |
Z |
|
(p ) |
= |
1 |
. По определению |
||
12 |
Cp |
|||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
импеданса для участка 1–2, |
Z12 (p) = |
U 2 ( p) |
Ток в выражениях для Z ( p) и |
|||||||
|
. |
|||||||||
|
||||||||||
|
|
i ( p) |
|
|
|
|
|
|
||
Z12 (p) один и тот же, так как цепь представляет собой последовательное
соединение. Выражаем U |
|
( p) : U |
|
|
( p) = Z ( p) |
|
|
i ( p) = |
1 |
i ( p) . |
|||||||||
2 |
2 |
12 |
Cp |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
i( p) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||
Таким образом, W (p) |
= |
|
Cp |
|
|
|
= |
|
|
. |
|
|
|
||||||
|
|
|
|
|
|
||||||||||||||
RCp + 1 |
|
RCp + 1 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
i( p) |
|
|
|
|
|
|
|
||||
|
|
|
|
Cp |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Обозначим T = RC , T > 0 . Тогда |
W (p) = |
|
1 |
|
. |
|
|
||||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|||||||||||||||
Tp + 1
Восстановим дифференциальное уравнение данной системы по передаточной функции. Для этого воспользуемся найденным значение W (p) и определением передаточной функции.
W (p) = |
U |
2 |
( p) |
= |
1 |
; |
|
|
|
|
|||
|
U1 |
( p) |
|
Tp + 1 |
||
U1 (p) = (Tp + 1)U 2 ( p) .
Последнее равенство является операторным уравнением системы. Взяв обратное преобразование Лапласа от операторного уравнения при нулевых начальных условиях, получим искомое дифференциальное уравнение:
L−1 [U |
(p)] = L−1 [TpU |
2 |
(p )+ U |
2 |
( p)]; |
|||||
|
|
1 |
|
|
|
|
|
|
||
U |
1 |
(t ) = TU ′ |
(t ) + U |
2 |
(t) . |
|
|
|||
|
|
2 |
|
|
|
|
|
|
||
Пример 5.2. Для заданной динамической системы (рис. 5.3) найти передаточную функцию и восстановить дифференциальное уравнение описания функционирования системы во времени.
28

Тема 5 Передаточная функция
|
i(t ) |
|
|
L |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
U1 (t) |
|
|
|
|
|
|
R |
|
|
U |
2(t) |
|
||
|
|
|
|
|
|
|
|
|
||||||
вход |
|
|
|
|
|
|
|
|
выход |
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Рис. 5.3 – Схема динамической системы для примера 5.2 |
||||||||||||||
Решение. Импеданс всей цепи |
Z (p) = Lp + R . |
С |
другой стороны, по |
|||||||||||
определению импеданса, |
Z (p) = |
U1 |
( p) |
|
Выражаем |
напряжение U1 ( p) : |
||||||||
|
|
|
. |
|
||||||||||
|
|
|
|
|||||||||||
|
|
|
|
i ( p) |
|
|
|
|
|
|
|
|||
U1 ( p) = Z ( p) i ( p) = (Lp + R) i ( p) .
|
Рассмотрим отдельно участок 1-2: Z12 (p) = R . По определению импеданса |
||||||||||||
|
(p) = |
U 2 |
( p) |
|
|
|
|
|
|
|
|
|
|
Z12 |
|
|
. Выражаем U 2 |
( p) : U 2 |
( p) = Z12 ( p) i ( p) = R i ( p) . |
|
|||||||
|
|
|
|||||||||||
|
|
i ( p) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
U 2 (p) |
|
R i(p) |
R |
|
||||
|
Таким |
образом, W (p) = |
|
|
= |
|
= |
|
. |
Для удобства |
|||
|
U1(p) |
(Lp + R)i(p) |
Lp + R |
||||||||||
передаточную функцию приведем к стандартному виду – в числителе и знаменателе свободный коэффициент должен равняться 1:
W (p) = |
R |
1 |
|
|
|
||||
|
= |
|
|
|
. |
|
|
||
Lp + R |
Lp |
+ 1 |
|
|
|||||
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обозначим T = |
L |
, T > 0 ; тогда W (p) = |
1 |
. |
|||||
|
|
|
|||||||
|
|
|
R |
|
|
Tp + 1 |
|||
Дифференциальное уравнение системы имеет вид:
U |
(t ) = TU ′ |
(t ) + U |
2 |
(t) . |
1 |
2 |
|
|
Пример 5.3. Для заданной динамической системы (рис. 5.4) найти передаточную функцию и восстановить дифференциальное уравнение описания функционирования системы во времени.
i(t ) |
R1 |
C |
|
|
1 |
||
|
|
||
|
|
|
|
U1 (t) |
|
R2 |
U 2(t) |
вход |
|
выход |
|
|
|
||
|
|
|
2 |
Рис. 5.4 – Схема динамической системы для примера 5.3
29