

ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ ОПТИЧЕСКИХ ПРИБОРОВ СО ВСТРОЕННОЙ СИСТЕМОЙ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ
А.В. Демин, Н.С. Копорский, А.В. Сорокин
Изложены вопросы, связанные с имитационным моделированием на ЭВМ оптических систем с управляемой линией визирования в двух плоскостях и со встроенной системой стабилизацией изображения. Приведена математическая модель оптического прибора со встроенной системой стабилизации изображения. Приведены результаты эксперимента.
Моделирование объектов технического проектирования является важным этапом в процессе создания новой техники, так как на этом этапе осуществляется выбор проектного решения, а также возможно принятие решения о стратегии и оптимизации функционирования и верификации выбранного решения или алгоритма функционирования проектируемого технического объекта (ТО). Известны [1] три метода моделирования – физическое, математическое и моделирование с реальной аппаратурой. Не умаляя достоинств первого и третьего методов, заметим, что второй метод, тем не менее, обладает явными преимуществами, хотя бы в плане ресурсных и временных затрат.
Основными требованиями при математическом моделировании является адекватность реальных и моделируемых процессов, обеспечение которой определяется как уровнем ЭВМ, так и уровнем алгоритмизации моделируемого процесса. Известно, что построение математической модели осуществляется на основе физических законов, заложенных в основу функционирования проектируемой системы, а цель математического моделирования – заменить реальный ТО совокупностью более простых устройств, в которых причинно-следственные связи представимы в математической форме, доступной для теоретического исследования. Создание полной математической модели в силу теоремы Тьюринга нецелесообразно, тем самым ТО всегда сложнее его математической модели. Однако следует заметить, что когда ТО настолько сложен и многообразен, то математическая модель его становится слишком сложна и практически не реализуема на ЭВМ без потерь как по точности, так и по достоверности, т.е. с точки зрения отражения ТО в реальном масштабе времени эта модель становится грубым приближением к реальной ситуации. Особенно это характерно для объектов, в состав которого входят устройства, в основе функционирования которых лежат разные физические принципы, но объединенные общей функциональной задачей. В этой связи целесообразно применять имитационное моделирование ТО, суть которого сводится к описанию ТО набором моделей как на функциональном, так и на элементном уровнях. При этом методология и алгоритм построения математической модели ТО для имитационного математического моделирования на ЭВМ включает в себя:
1.анализ функционального состава и структуры моделируемого ТО, типовых режимов функционирования и их взаимосвязи в ТО, влияния внешней среды на функционирование ТО;
2.построение модельных модулей отдельных устройств ТО на основе их поведения; модуля, генерирующего проигрываемую в модели ситуацию; модуля, производящего оценку качества функционирования ТО в моделируемой ситуации.
Рассмотрим всё сказанное применительно к оптическим комплексам, проектирование которых с точки зрения выбора оптимального схемотехнического решения является проблемой.
В данной работе изложены вопросы, связанные с имитационным моделированием на ЭВМ оптических систем с управляемой линией визирования в двух плоскостях и со встроенной системой стабилизацией изображения (ОССИ).
138
На рис.1 представлена принципиальная схема макета ОССИ, включающая в себя пару подвижных оптических элементов (зеркало и четырехгранная зеркальная призма – ПОЭ) пара оптических каналов (ОС) и пара согласующих неподвижных зеркал, электропривод (ЭП1 и ЭП2), гироскопическое информационно измерительное устройство (ИУ) возмущающих систему внешних воздействий и система управления (СУ). Направления вращения ПОЭ указано стрелками.
ЭП1
ПОЭ1
ИУ
и
СУ
ПОЭ2
ОС2
ОС1 ЭП2 
Рис. 1. Принципиальная схема макета ОССИ
Математическая модель ОССИ как сложной системы, включающей в себя как оптическую, так и электромеханическую части, может быть представлена в следующем виде (модель построена на основе работ [2–4]):
|
|
|
• |
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
0 |
|
|
ξ |
|
|
||
|
|
|
ξ |
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
0 |
|
|
|
|||||
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
||
|
|
|
x |
|
= |
|
|
|
|
|
0 |
|
|
|
|
|
A |
0 |
• |
x |
+ |
|
||||
|
|
I / |
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
I |
|
|
||||
|
|
|
|
|
|
|
|
M C1 + MC1 A |
M C2 + MC2 A1 |
0 |
|
|
|
(1) |
||||||||||||
|
OO |
/ |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OO |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
B1 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||
|
+ |
|
|
|
B |
2 |
|
|
|
|
•ξ+ |
|
B |
|
|
•U |
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
) + B |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|||||
|
|
|
M (C |
B |
|
|
|
MC |
B |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
2 |
|
2 |
|
1 |
|
|
|
|
2 |
3 |
|
|
|
|
|
|
|
|
||
где |
|
|
I / |
|
|
= M |
I |
|
|
– |
|
матричное уравнение, |
описывающее |
действие сложной |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
/ |
|
|
|
||||||||||||||||||||
|
OO |
|
|
|
|
|
|
OO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
−−
оптической системы; OO и OO ' – орты направления оптической оси в пространстве
139
предметов и изображений; I и I/ – лучи в пространстве изображений и предметов,
соответственно, |
I = [y , V ]T , |
y – высота, а V – направляющий косинус луча I; |
|
MC |
0 |
– матрица, |
представляющая собой оператор действия сложной |
M = |
|
||
0 |
MЗ‚ |
|
|
оптической системы, состоящей из зеркальных и линзовых элементов; Мс – ABCD- матрица действия центрированной системы линз, а Мз - матрица действия системы
зеркальных |
элементов; |
|
I |
=C •ξ+C • x |
– |
матрица, |
учитывающая движение |
||||
|
|
|
|||||||||
|
|
|
1 |
2 |
|
|
|
|
|
||
|
|
OO |
|
|
|
|
|
|
|
||
объекта наблюдения |
и |
основания |
системы |
C 1 , C 2 |
– |
матрицы |
постоянных |
||||
коэффициентов; χ – вектор перемещения ОССИ в пространстве; ξ – шум; U – вектор |
|||||||||||
управления |
оптическими |
элементами; |
A1 , |
B 2 , B 3 |
– |
матрицы |
постоянных |
||||
коэффициентов. |
|
|
|
|
|
|
|
|
|
|
|
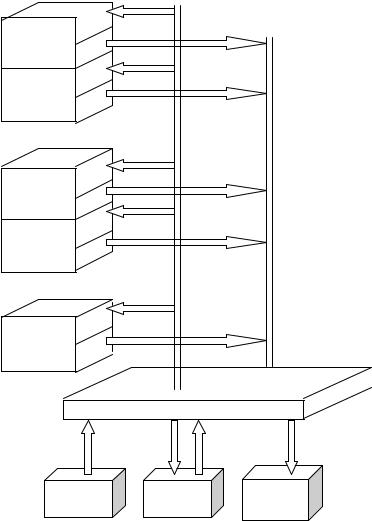
имитатор
ОС
имитатор
ПОЭ
имитатор
ЭП
имитатор
ИУ
имитатор вн. возмущ.
Управляющая программа моделирования
ПП начала |
ПП сбора |
ПП окон- |
|
имитации |
статистики |
чания |
|
имитации |
|||
|
|
Рис. 2. Имитационная модель ОССИ. (АЛ – алгоритм имитации события; Мt – временной фактор)
Рассматривая ОССИ как объект имитационного моделирования (в соответствии с методикой, предложенной в [1]), можно выделить следующие основные узлы, представленные на рис. 2: ОС – оптическая система; ПОЭ – подвижной оптический элемент; ЭП – электропривод; ИУ – гироскопическое информационно измерительное устройство.
140
Математически имитационная модель есть не что иное, как совокупность алгоритмов функционирования этих блоков. При этом следует отметить, что для полноты этой модели внешние возмущения (ВВ) тоже должны быть представлены в виде математического блока. Понятно, что одним из переменных факторов при моделировании является временной фактор, который не действует только на параметры телескопической системы. В нашем случае понятие активности [1] следует трактовать как реакция на внешнее возмущение, выражаемое в форме парирования (отработки) ПОЭ этих возмущений, но с отставанием по времени и с амплитудночастотной характеристикой (АЧХ) максимально приближенной к АЧХ внешних возмущений.
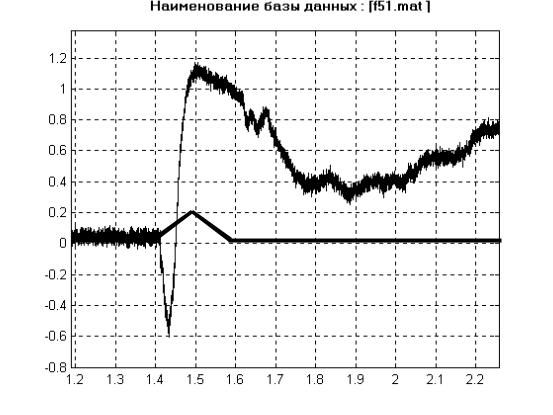
В результате имитационного моделирования на ЭВМ (моделирование проводилось с помощью пакета программ Mat Cad) было установлено, что наиболее "слабое звено" – это ПОЭ. На рис.3 представлен график реальной реакции головного зеркала ОССИ на внешнее возмущение (по оси ординат – мрад; по оси абсцис – мсек) относительно расчетной (сплошная линия). Реальное текущее положение головного зеркала определялось регистрирующим автоколлимационным устройством (на рис. кривая).
Рис. 3. График реальной реакции головного зеркала ОССИ на внешнее
возмущение относительно расчетной реакции (по иси ординат – мрад; по оси абсцис – мсек)
В качестве исходных параметров динамического режима для моделирования было принято: амплитуда качки ПОЭ ОССИ ±2°; частота качки 10 Гц. В результате моделирования на ЭВМ и эксперимента были выявлены конструкторскотехнологические недостатки макета и определены пути их устранения.
Таким образом, можно сделать следующие выводы:
•предложена математическая модель оптической системы с управляемой линией визирования в двух плоскостях и со встроенной системой стабилизацией изображения, которая может быть положена в основу имитационного моделирования на ЭВМ;
141
•приведены результаты физического и имитационного моделирования, что говорит о правомерности применения для проектирования технических объектов, в состав которого входят устройства, в основе функционирования которых лежат разные физические принципы, но объединенные общей функциональной задачей.
Литература
1.Максимей И.В. Имитационное моделирование на ЭВМ. М.: Радио и связь, 1988.
232с.
2.Демин А.В. и др. Серия биноклей со встроенной системой стабилизации изображения. // Оптико-электронные приборы и системы. Сб. научных статей. Выпуск 97 / Под редакцией проф. Э.Д. Панкова и проф. А.В.Демина. СПб., 1997 .С.
8– 15.
3.Демин А.В. Лапшина И.А. Модель пеленгационного устройства лазерноинформационной системы. // Известия ВУЗов. Приборостроение. 1989. Т. XXIX, №
8..С.79–84.
4.Демин А.В., Петров И.В. Матричные методы описания действия оптических приборов. // Известия ВУЗов. Приборостроение. 1986. Т. XXIX. № 6. С. 59–66.
5.Демин А.В., Гордеев Д.М. Оптимизация конструкции подвижного зеркала на торсионном подвесе. // Оптико-электронные приборы и системы. Сб. научных статей. Выпуск 97 / Под редакцией проф. Э.Д. Панкова и проф. А.В. Демина СПб., 1997. С. 45 – 49.
6.Демин А.В., Утенков Б.И. Повышение качества изображения в оптических системах со стабилизацией визирной линии. // Оптический журнал. 2001. Т. 68. № 8. С. 21–24.
142