

Н азвание
фильтра обусловлено тем, что импульсная
характеристика апериодического звена
описывается экспоненциальной функцией.
азвание
фильтра обусловлено тем, что импульсная
характеристика апериодического звена
описывается экспоненциальной функцией.
циальный фильтр представляет собой апериодическое звено и описывается дифференциальным уравнением
![]()
где у и &ф — параметры настройки фильтра. Уравнению (3.28) соответствует АФХ
![]()
где Гф=1./7 — постоянная времени фильтра.
Из условия (3.22) для статического режима определяют оптимальное значение параметра k& (коэффициента усиления):
![]()
Определение оптимального значения параметра у производится из условия (3.23), для чего предварительно рассчитывают спектральную плотность погрешности экспоненциального фильтра по формуле (3.25) с учетом (3.29) и (3.30):
![]()
Дисперсия погрешности экспоненциального фильтра, согласно (3.24) —(3.25) с учетом (3.29), равна
![]()
При вычислении этого интеграла оба слагаемых подынтегрального выражения раскладывают на простые дроби, каждая из которых сводится к табличному интегралу вида

После выполнения соответствующих преобразований получают следующее выражение для дисперсии погрешности фильтрации:
![]()
■Оптимальное значение параметра настройки у получают из необходимого условия экстремума функции Aj>(y):
![]()
откуда

Таким образом, функция Оф(у) имеет единственную точку стационарности, тип которой зависит от знака второй производной при v=Y°- Можно показать, что при выполнении условия
![]()
особая точка является минимумом функции Aj>(y)> а при выполнении условия km<C\ в точке y=Y° функция D&(y) достигает максимума. Таким образом, если сочетание характеристик полезного сигнала и помехи соответствует случаю (3.32а),то оптимальное значение параметра настройки определяется по формуле (3.32). Если это условие не выполняется, то оптимальным является наибольшее допустимое значение параметра у.
При программной реализации экспоненциального фильтра дифференциальное уравнение (3.28) заменяют разностным уравнением вида
![]()
где / — номер цикла расчета.
Отсюда получают следующее рекуррентное соотношение для вычисления сглаженного значения г/ф(/) в очередном /-том цикле
ПЯГЦЙТЯ1
![]()
К достоинствам алгоритма экспоненциальной фильтрации относятся малая трудоемкость расчетов и малый объем памяти УВМ, в которой должна храниться величина у и обновляемая в каждом цикле расчета величина г/ф(/—1).
Фильтр скользящего среднего в аналоговом варианте реализует вычисление среднего значения функции g(t)
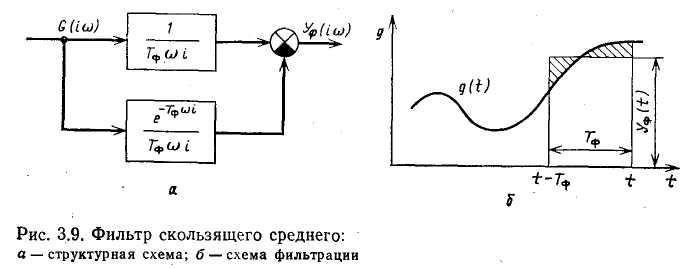
на интервале времени от t—Гф до t (рис. 3.9,6):

где Гф — параметр настройки фильтра (время усреднения).
Преобразуем правую часть выражения (3.34), представив
РГП R RH7ie%
Отсюда видно, что фильтр скользящего среднего представляет собой параллельное соединение двух интегрирующих звеньев, одно из которых последовательно соединено со звеном запаздывания (рис. 3.9а). Поэтому амплитудно-фазовая характеристика фильтра описывается выражением
![]()
которое аналогично по структуре выражению (3.12) и может быть преобразовано к виду
![]()
Решая совместно (3.24) — (3.27) и (3.35), можно получить выражение для дисперсии погрешности А}> фильтра скользящего среднего и определить оптимальное значение Г°ф параметра настройки из необходимого условия минимума функции />ф(Гф). Получаемое при этом выражение очень громоздко, неудобно для практического использования. На его основе рассчитаны номограммы [24], по которым для заданных значений а, т, k можно определить 7"оф.
При программной реализации фильтра скользящего среднего расчет сглаженного значения #ф(/) в очередном /-том цикле проводится по формуле
А7
![]()
где N=T<blh — параметр настройки фильтра.
Для расчета по формуле (3.36) требуется хранить в памяти УВМ (N-\-l) значение функции g(jt0).
Статистические фильтры. Статистическими называют фильтры, которые в аналоговом варианте представляют собой параллельное соединение (я+1) цепочек, состоящих из усилительного зве-
на и звена чистого запаздывания. Передаточная функция такого фильтра

Статистический фильтр нулевого порядка. Это простейший среди фильтров данной группы. Его передаточная функция получается из формулы (3.37) при N=0, т. е. это просто усилительное звено, выходной сигнал которого
![]()
При непосредственном использовании формулы (3.38) сглаженная функция г/о (t) будет являться смещенной оценкой полезного сигнала у (t), т. е. ее математическое ожидание не будет равно mg. Действительно, усредняя левую и правую части (3.38) с учетом (3.3) и те = 0, получим:
![]()
Для получения несмещенной оценки к правой части (3.38) необходимо прибавить постоянный член а, удовлетворяющий условию
![]()
![]()
![]()
где 6о — параметр настройки фильтра.
Погрешность! фильтрации, согласно (3.22) и (3.39) с учетом (3.3), равна
![]()
о
где y(t)=y(t) —tn(y) —центрированная функция y(t).
Возводя левую и правую части формулы (3.40) в квадрат и усредняя, получим следующее выражение для среднего квадрата погрешности фильтрации:
![]()
Оптимальное значение параметра настройки Ьо, полученное из необходимого условия минимума функции Бф (Ьо), равно
![]()
Ему соответствует минимальная среднеквадратичная погрешность гЬи.ттьтпягтии-
![]()
Как видно из (3.42), статистический фильтр нулевого порядка
при оптимальной настройке снижает случайную погрешность сигнала измерительной информации в (1+&) раз.
При программной реализации статистического фильтра нулевого порядка расчёт сглаженных значений производится по формуле:
![]()
Статистический фильтр первого порядка. Его передаточную функцию получают из (3.37) при JV = 1:
![]()
Во временной области уравнение этого фильтра имеет следующий вид:
![]()
Усредняя левую и правую части этого выражения и учитывая (3.3), получим: М[уф(1)]= (bo-\-bi)my.
Для выполнения условия несмещенности оценки y$(t), т. е. условия M[y<t,(t)] — my, коэффициенты Ьо и Ьи очевидно, должны удовлетворять соотношению Ь\ = \—Ьо, с учетом которого формула (3.43) приводится к виду:
![]()
где Ьо и х — параметры настройки статистического фильтра первого порядка.
Погрешность фильтрации e$(t), согласно (3.3), (3.21) и (3.44), равна
![]()
а дисперсия погрешности
![]()
Оптимальное значение параметра настройки Ьо получаем из ус-
ловия -*г=0;
![]()
В большинстве случаев статистические фильтры реализуются программно, поэтому второй параметр настройки т совпадает с периодом /о квантования по времени функции g(t).
Сравнительный анализ фильтров по совокупности показателей (точности, трудоемкости, потребному объему памяти УВМ и др.) показал [24], что для аналогового варианта целесообразно использовать экспоненциальный фильтр, а для программной реализации — экспоненциальный или статистический фильтр первого порядка.
3.4. АНАЛИТИЧЕСКАЯ ГРАДУИРОВКА ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ И КОРРЕКЦИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
В метрологии градуировкой называют операцию, с помощью которой делениям шкалы измерительного прибора придают определенные численные значения, выраженные в единицах измерения определяемой величины [27]. Аналогичный смысл вкладывают в понятие аналитической градуировки ИП: это операция определения (восстановления) значения х измеряемой величины по сигналу у измерительной информации на выходе ИГГ (см. рис. 3.1). Операцию аналитической градуировки выполняют с использованием градуировочной характеристики ИП, представляющей собой функцию, обратную его номинальной статической характеристике (3.2):
![]()
где кт — значение измеряемой величины, соответствующее по градуировочной характеристике ИП значению у сигнала измерительной информации.
Градуировочная характеристика или номинальная статическая характеристика приводится в паспорте ИП в виде аналитической функции или таблицы соответствия значений хт; и у,-.
Рассмотрим несколько примеров ИП, для которых известно аналитическое выражение характеристики /0 или /о"1. Гидростатический уровнемер жидкости преобразует значение измеряемого уровня L в перепад давлений ДР между точками отбора импульсов (в самой нижней _ точке аппарата и над уровнем жидкости):
![]()
где р — плотность жидкости, кг/м3; L — уровень жидкости, м; &i—масштабный коэффициент, зависящий от выбора единиц измерения величины ДР (например, если АР выражено в МПа, то £i = 10-5).
Перепад ДР линейно преобразуется дифманометром в стандартный электрический сигнал у (например, 0—10 В на весь диапазон измерения). Таким образом, статическая характеристика данного ИП описывается уравнением
![]()
где kz=y*l&P* — коэффициент усиления дифманометра; у*—значение выходного сигнала дифманометра, соответствующее верхнему пределу измерения ДР* (для упрощения выкладок предполагается, что нижним пределом измерений является нуль).
Ей
соответствует градуировочная
характеристика:
![]()
![]()
Для комплекта рН-метра, состоящего из чувствительного элемента и преобразователя э. д. с. чувствительного элемента в стандартный электрический сигнал, статическая характеристика описывается уравнением [2]
![]()
тде £и, рНи, So и а — константы, значения которых зависят от типа электродов чувствительного элемента; 9 — температура анализируемого раствора, "С; й3=</*/рН*—коэффициент усиления комплекта рН-метра; у*—значение выходного сигнала преобразователя, соответствующее верхнему пределу измерения рН*.
Ей
соответствует градуировочная
характеристика
Номинальная
статическая характеристика расходомера
переменного перепада давления
описывается следующей нелинейной
функцией:
![]()
![]()
![]()
где у — стандартный выходной сигнал дифманометра (который рассматривается как линейный преобразователь перепада давления на сужающем устройстве в выходной сигнал у); k — коэффициент, зависящий от условий измерения; Q — измеряемая величина, т. е. объемный расход потока через сечение трубопровода.
Ей соответствует градуировочная характеристика
![]()
где ko —■ градуировочное значение коэффициента k.
Если градуировочная характеристика ИП задана аналитически, то операция аналитической градуировки сводится к выполнению расчета по формуле (3.47).
![]()
коэффициенты av которого определяют по методу наименьших квадратов, т. е. из условия
Для многих ИП с нелинейной градуировочной характеристикой последнюю определяют экспериментально и вносят в паспортные данные в виде графика или таблицы соответствия значений хт и г//. В частности, в виде таблицы задают градуировоч-ные характеристики наиболее массовых ИП, применяемых в АСУТП химических производств — термопреобразователей сопротивления (ТС) и термоэлектрических преобразователей температуры (ТПТ). При табличном представлении градуировочной характеристики применяют способ аналитической градуировки, заключающийся в аппроксимации табулированной градуировочной характеристики аналитическим выражением, которое в дальнейшем используют для вычисления значений хг. Чаще всего в качестве аппроксимирующей функции используют многочлен m-й степени:
Например, слабо нелинейные градуировочные характеристики ТС и ТПГ с достаточно высокой точностью аппроксимируются полиномами не выше третьей степени. В частности, градуировочная характеристика хромель-копе-левого ТПТ в диапазоне температур 0—600 СС аппроксимируется следующим полиномом второй степени [45]:
![]()
где хс — значение температуры, °С; у — э. д. с. ТПТ, мВ. Максимальная относительная погрешность аппроксимации табличных данных не превышает 0,5%.
Вычисления по формуле (3.53) целесообразно выполнять по так называемой схеме Горнера:
![]()
Блок-схема алгоритма, реализующего вычисление по схеме Горнера, представлена на рис. 3.10.
Операция аналитической градуировки ИП позволяет определить действительное значение х измеряемой величины по сигналу у измерительной информации только в том случае, если х преобразовано в у в соответствии с номинальной статической характеристикой ИП (3.2), т. е. при выполнении условия
![]()
Действительно, в этом случае
![]()
Однако в производственных условиях невозможно стабилизировать значения всех влияющих величин на номинальном уровне, что приводит к нарушению условия (3.54). При этом
![]()
где Д£—■ вектор отклонений влияющих величин от номинальных значений.
Возникает так называемая дополнительная погрешность измерения, которая, очевидно, равна:
![]()
Если известна полная статическая характеристика ИП (3.1) и вектор Az, можно рассчитать погрешность Ахг и внести соответствующую поправку к расчетному значению хг, полученному по градуировочной характеристике.
Истинное значение х при нарушении условия (3.54) находят при расчете по функции, обратной полной статической характеристике ИП:
![]()
Его можно найти, умножая значение хт, полученное по формуле (3.47), на некоторый поправочный коэффициент kn:
![]()
Откуда с учетом (3.56) и (3.47) получим:
![]()
![]()
В качестве примера найдем выражение для расчета поправочного коэффициента для гидростатического уровнемера. Статическую характеристику (3.49) гидростатического уровнемера преобразуем так, чтобы сделать явной ее зависимость от температуры жидкости, которая является главной влияющей величиной. Для этого заменим плотность р соотношением, описывающим ее зависимость от температуры 6 при небольших отклонениях от номинального значения 6о:
![]()
![]()
где р — температурный коэффициент объемного расширения жидкости. После подстановки (3.59) в (3.49) получим полную статическую характеристику в виде
![]()
Обратная ей функция:
Поправочный коэффициент найдем, согласно (3.58), делением этого выражения на градуировочную характеристику (3.50):
![]()
Особенно часто в АСУТП корректируют результаты измерения расходов, поскольку обычно их используют для расчета
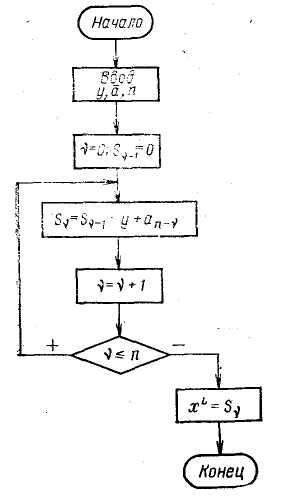
Рис. 3.10. Блок-схема алгоритма вычис лення полинома по схеме Горнера
fexHHKO-экономических показателен производства. В подавляющем большинстве случаев расход газов, пара и жидкости, транспортируемых пс трубопроводам, измеряют с помощью расходомеров переменногс перепада давления [27]. При ис пользовании стандартных сужающих устройств расходомеры этогс типа градуируют расчетным путем т. е. для определенных номинальны? условий измерения (температура давление и т. д.) рассчитывают гра дуировочную характеристику расхо домера. Коррекцию измеренных зна чений расхода производят при от клонении условий измерения от но минальных, а также с целью приве дения результатов к единым услови
ям (обычно температура 20 °С, давление 105 Па), чтобы сделать их сопоставимыми.
. Для коррекции применяют общие соотношения (3.57) и (3.58). Формулы для расчета поправочных коэффициентов для разных возможных на практике случаев измерения расхода получают подстановкой в (3.58) выражения (3.52), конкретизированного для каждого случая.
Для примера рассмотрим коррекцию результатов измерения массового расхода насыщенного пара на изменение давления в трубопроводе. В этом случае функция, обратная полной статической характеристике расходомера, описывается выражением [27].
![]()
где k — коэффициент, практически не зависящий от давления; р — плотность измеряемой среды.
Таким образом,
£п=Ур/ро- В частности, для диапазона
давлений 0,25— 0,85 МПа зависимость р от
давления насыщенного пара аппроксимируется
полиномом второй степени [45]:
![]()
![]()
Задав номинальное значение Яо, можно по этой формуле рассчитать ро, а затем в процессе измерения рассчитывать фактическую плотность, соответствующую текущему значению Р, и вносить поправку на изменение условий.
3.5. КОНТРОЛЬ И ПОВЫШЕНИЕ ДОСТОВЕРНОСТИ ИСХОДНОЙ ИНФОРМАЦИИ
Исходная информация о текущем состоянии объекта управления поступает в УВМ по многим десяткам, а иногда и сотням ИИК. С увеличением их числа возрастает риск попадания в систему недостоверной информации, поэтому одной из важнейших функций первичной обработки информации в АСУТП является контроль ее достоверности.
Недостоверная исходная информация появляется при отказах ИИК, которые делятся на полные и частичные (метрологические). Полный отказ наступает при выходе из строя ИП или повреждении линии связи ИП с УВМ. При частичном отказе технические средства сохраняют работоспособность, однако погрешность измерения соответствующего параметра превышает допустимое значение.
Обнаружение полных отказов ИИК является гораздо более простой задачей, чем выявление частичных отказов. Поэтому сначала рассмотрим алгоритмы контроля достоверности исходной информации, позволяющие обнаружить только полный отказ ИИК. При этом недостоверное значение параметра должно быть заменено достоверной оценкой, в качестве которой может
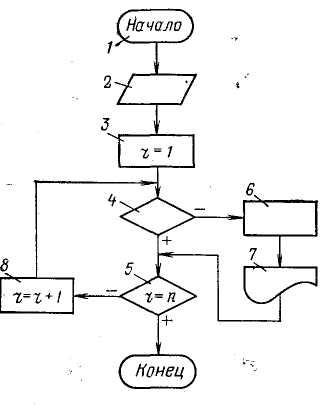
Рис. 3.11. Блок-схема алгоритма допус-кового контроля достоверности исходной информации
быть использовано предыдущее достоверное значение этого параметра или его значение, усредненное за некоторый интервал времени, предшествующий моменту обнаружения отказа ИИК. Последний способ применяют для наиболее ответственных параметров, например, расходов, значения которых используют при расчете ТЭП.
Алгоритм допускового контроля параметра. Он основан на том, что при работе объекта значения
каждого из контролируемых технологических параметров дс,- не могут выходить за определенные границы:
Соответственно при исправном ИИК должен быть ограничен и сигнал измерительной информации г/,, поступающий в УВМ по этому каналу:
Контроль достоверности по этому алгоритму заключается в проверке выполнения условия (3.61) для каждого значения сигнала измерительной информации, поступившего при очередном опросе ИИК. Блок-схема алгоритма представлена на рис. 3.11. Он работает следующим образом.
После инициации работы алгоритма (блок /) и ввода исходных данных (блок 2) организуется цикл проверки ИИК, каждому из которых присвоен свой номер г (блок 3); в блоке 4 проверяется условие (3.61), при выполнении которого проверяется условие окончания работы алгоритма (блок 5). Выполнение условия г = п (где п — число контролируемых ИИК) останавливает работу алгоритма. Если это условие не выполняется, счетчик номера ИИК увеличивается на 1 (блок 8), и цикл повторяется. Если при проверке в блоке 4 условие (3.61) не выполняется, то в блоке 6 недостоверное значение yr (jt0) заменяется достоверным значением yj[(j—1)^0] того же сигнала, полученным в предыдущем цикле опроса ИИК. Затем на печать выводится сообщение о том, что обнаружен отказ t-того ИИК (блок 7), и работу алгоритма продолжает блок 5.
Этот алгоритм применим не только для стационарных процессов, но и для нестационарных, например периодических. В этом случае граничные значения у,* и у,* в условии (3.61) являются не константами, а функциями времени, отсчитываемого от начала процесса. Алгоритм допускового контроля скорости изменения сигнала
измерительной информации основан на том, что скорость изменения любого технологического параметра хг ограничена условием
![]()
где о)с—частота среза функции xr(t)\ x, — среднее значение этой функции.
Соответственно должна быть ограничена и скорость изменения сигнала измерительной информации yr(t)
![]()
![]()
Контроль достоверности по данному алгоритму заключается в проверке выполнения условия (3.63), причем оценку производной dyijdt рассчитывают по формуле
![]()
Контроль достоверности исходной информации по условиям (3.61) и (3.63) часто совмещается. Тогда в блок-схему алгоритма на рис. 3.11 между блоками 4 и 5 вводится еще один блок, осуществляющий проверку выполнения условия (3.63). При нарушении этого условия инициируется блок 6.
Алгоритмы контроля достоверности исходной информации, е помощью которых выявляются частичные отказы ИИК, основаны на использовании информационной избыточности, которая всегда имеется в АСУТП. Избыточность прежде всего может быть создана искусственно при проектировании АСУТП за счет ап-' паратурной избыточности, например резервирования ИИК для контроля наиболее важных технологических параметров.
Другой вид информационной избыточности в АСУТП обусг ловлен тем, что информация о действительном значении некоторого технологического параметра содержится не только в измеренном значении этого параметра, но и в измеренных значениях других параметров, связанных с ним устойчивыми зависимостями, например, уравнениями материального баланса.
При разработке алгоритмов контроля достоверности исходной информации на основе информационной избыточности принимают следующие допущения: