

Контрольные вопросы к защите
Что такое передаточная функция
нули и полюса передаточной функции
импульсная характеристика (весовая функция)
переходная функция
частотная характеристика
модель в пространстве состояний
модель вида «нули-полюса»
коэффициент усиления в статическом режиме
полоса пропускания системы
время переходного процесса
частота среза системы
собственная частота колебательного звена
коэффициент демпфирования колебательного звена
В каких единицах измеряются
коэффициент усиления в статическом режиме
полоса пропускания системы
время переходного процесса
частота среза системы
собственная частота колебательного звена
коэффициент демпфирования колебательного звена
Как связана собственная частота с постоянной времени колебательного звена?
Может ли четверка матриц
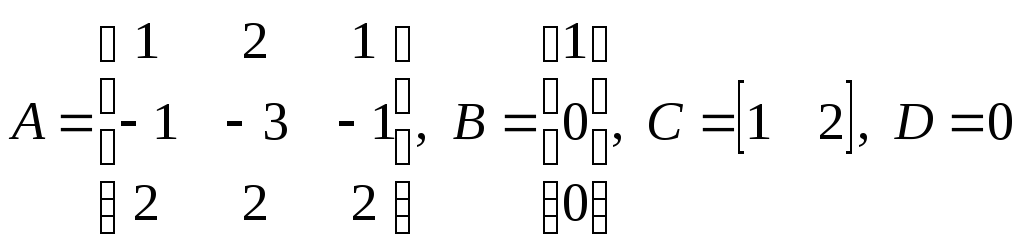
быть моделью системы в пространстве состояний? Почему? Какие соотношения между матрицами должны выполняться в общем случае?
Как получить краткую справку по какой-либо команде Matlab?
В чем разница между командами Matlab
who и whos clear all и clc
Как ввести передаточную функцию
![]() ?
?
Как влияет изменение коэффициента
прямой передачи (матрицы
![]() в модели в пространстве состояний) на
статический коэффициент усиления?
в модели в пространстве состояний) на
статический коэффициент усиления?
Какие возможности предоставляет модуль LTIViewer?
Что можно сказать об импульсной характеристике системы f_ss? Почему она не была построена верно?
Как найти
коэффициент усиления в установившемся режиме по АЧХ
полосу пропускания системы по АЧХ
Как скопировать график из окна Matlabв другую программу?
Как построить массив из 200 значений в
интервале от
![]() до
до![]() с равномерным распределением на
логарифмической шкале?
с равномерным распределением на
логарифмической шкале?
Какие величины откладываются по осям на графике АЧХ?
Проектирование регулятора для линейной системы
Цели работы
Освоение методов проектирования регулятора для одномерной линейной непрерывной системы с помощью среды Matlab.
Задачи работы
научиться строить модели соединений линейных звеньев
научиться использовать модуль SISOTool для проектирования простейших регуляторов
Краткие теоретические сведения
Модели соединений систем
Для построения моделей соединений систем в Matlab используются знаки арифметических действий. Эти операции перегружены, то есть, переопределены специальным образом для объектов классов tf,ssиzpk. Введем исходные модели, с которыми будем выполнять все операции:
____________________________________________________________________________
>> f = tf(1, [1 1]);
>> g = tf(1, [2 1]);
____________________________________________________________________________
параллельное соединение

![]()
____________________________________________________________________________
>> w = f + g
Transfer function:
3 s + 2
---------------
2 s^2 + 3 s + 1
____________________________________________________________________________
последовательное соединение
![]()
![]()
____________________________________________________________________________
>> w = f * g
Transfer function:
1
---------------
2 s^2 + 3 s + 1
____________________________________________________________________________
контур с отрицательной обратной связью

![]()
____________________________________________________________________________
>> w = feedback(f, g)
Transfer function:
2 s + 1
---------------
2 s^2 + 3 s + 2
____________________________________________________________________________
Можно вычислить эту передаточную функцию и так:
____________________________________________________________________________
>> w = f / (1 + g*f)
Transfer function:
2 s^2 + 3 s + 1
-----------------------
2 s^3 + 5 s^2 + 5 s + 2
____________________________________________________________________________
Этот результат может показаться неожиданным. Дело в том, что обе передаточных функции имеют первый порядок, то есть, описываются дифференциальным уравнением (ДУ) первого порядка. Поэтому вся система должны описываться второго порядка, а мы получили третий. Чтобы разобраться в этом, преобразуем модель к форме «нули-полюса»:
____________________________________________________________________________
>> w_zpk = zpk( w )
Zero/pole/gain:
(s+1) (s+0.5)
-----------------------
(s+1) (s^2 + 1.5s + 1)
____________________________________________________________________________
Видно, что числитель и знаменатель передаточной функции содержат общий множитель s+1, который можно сократить, и остается система второго порядка. Для этого надо построитьминимальную реализацию, сократив общие множители:
____________________________________________________________________________
>> w = minreal ( w )
Transfer function:
s + 0.5
---------------
s^2 + 1.5 s + 1
____________________________________________________________________________
Эта передаточная функция совпадает с той, что выдает функция feedback.
контур с положительной обратной связью

![]()
____________________________________________________________________________
>> w = feedback(f, -g) или
>> w = feedback(f, g, 1) или
>> w = minreal ( f/(1 - g*f))
Transfer function:
2 s + 1
-----------
2 s^2 + 3 s
____________________________________________________________________________