

§ 1.6. Механические колебания
Колебательные процессы весьма часто встречаются в окружающей нас природе и технике. Значительная часть механических движений – движение машин, работающих циклически; почти все акустические явления; переменный ток, применяющийся в быту и в разнообразных технических устройствах; радиотехника и часть электроники; вся волновая оптика; волновые свойства частиц – вот далеко не полный перечень явлений и технических приложений, описываемых на языке колебательных и волновых процессов. В конце концов, наши сердца бьются; наши легкие колеблются при дыхании; мы дрожим, когда нам холодно; мы можем слышать и разговаривать благодаря колебаниям барабанных перепонок и голосовых связок. Световые волны, которые позволяют нам видеть, имеют колебательную природу. Когда мы ходим, наши ноги совершают колебания. Колеблются даже атомы, из которых мы состоим. Если расширенно толковать термин «колебания», то сразу становится очевидным, что многие события повседневной жизни обладают необычайной цикличностью. Мир, в котором мы живем, удивительно склонен к колебаниям. Именно поэтому колебательному движению уделяется особое внимание в физике и технике.
Кроме того, периодическое негармоническое движение можно свести к сумме гармонических движений, причем эти составные движения доступны непосредственному наблюдению при помощи современной аппаратуры. Более того, существует аппаратура, позволяющая складывать заданные гармонические движения и получать, таким образом, периодические движения сложного характера.
В процессе развития науки создан мощный и удобный математический аппарат для описания и исследования периодических движений различной физической природы.
Колебаниями называются движения, процессы, изменения состояния, которые характеризуются определенной повторяемостью во времени значений физических величин, определяющих это движение, процесс или состояние.
Колебание называют периодическим, если значения величин, изменяющихся в процессе колебаний, повторяются через равные промежутки времени. Период колебания Т – это минимальный промежуток времени через который повторяются определенные состояния системы (время, за которое совершается одно полное колебание). Период измеряется в секундах.
Частота
колебаний
![]() (линейная частота) – это скалярная
физическая величина равная числу
колебаний, совершаемых системой за
единицу времени. Частота колебаний
измеряется в Герцах (Гц).
(линейная частота) – это скалярная
физическая величина равная числу
колебаний, совершаемых системой за
единицу времени. Частота колебаний
измеряется в Герцах (Гц).
Если
за какое-то время t
система совершает N
колебаний, то
![]() и
и
![]() .
Отсюда следует, что
.
Отсюда следует, что
![]() и
и
![]() .
.
Гармонические колебания
Среди разнообразных периодических движений особое место занимает гармоническое колебательное движение. Гармоническими называют колебания, в которых интересующая нас величина х (например, линейное или угловое смещение из положения равновесия, скорость, ускорение, заряд, напряжение и т.д.) изменяется со временем t по закону косинуса или синуса, то есть
![]() , (1)
, (1)
или
![]()
Здесь:
-
А – амплитуда (максимальное значение величины х). Определяется начальными условиями. Измеряется в единицах величины х.
-
 – фаза
колебания. Определяет мгновенное
значение величины х в момент времени
t.
За период фаза получает приращение
– фаза
колебания. Определяет мгновенное
значение величины х в момент времени
t.
За период фаза получает приращение
 .
. -
 – начальная
фаза колебания. Определяется значением
величины х в момент времени t=0.
– начальная
фаза колебания. Определяется значением
величины х в момент времени t=0.
-
 – собственная
циклическая (круговая) частота колебаний.
Определяется
параметрами колебательной системы.
Измеряется
в
– собственная
циклическая (круговая) частота колебаний.
Определяется
параметрами колебательной системы.
Измеряется
в
 .
.
Циклическая частота
связана с линейной частотой и периодом
следующими соотношениями
![]() .
.
С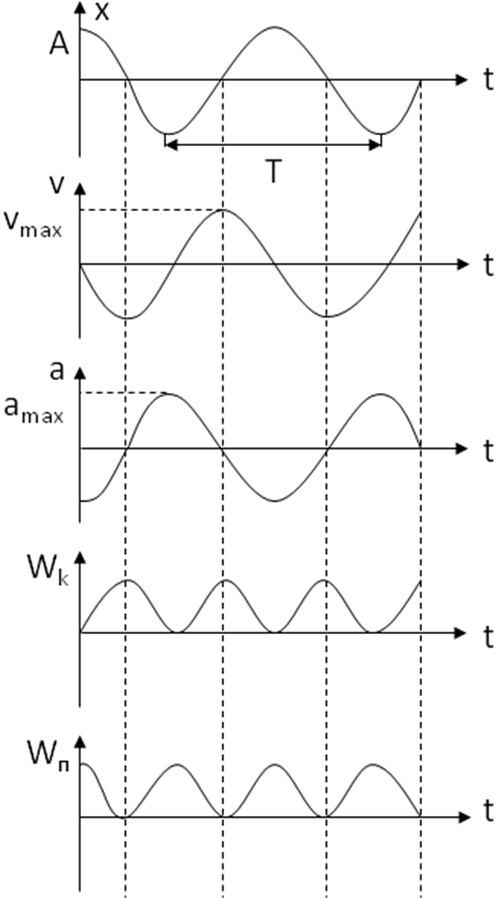 корость
и ускорение тела также изменяются по
гармоническому закону. Продифференцировав
по времени уравнение (1) найдем скорость
изменения величины х —
корость
и ускорение тела также изменяются по
гармоническому закону. Продифференцировав
по времени уравнение (1) найдем скорость
изменения величины х —
![]() и ускорение
и ускорение
![]() :
:
![]()
![]() .
(2)
.
(2)
При этом максимальное значение скорости колеблющегося тела Vmax = Aω0, максимальное значение модуля ускорения amax = Aω02.
Кинетическая энергия колеблющегося тела Wk = ½mv2 = ½mA2ω02 sin2 (ω0t+φ).
Потенциальная энергия (учитывая, что сила квазиупругая) Wп = ½ kx2 = ½ kA2 cos2 (ω0t+φ).
Полная энергия системы при гармонических колебаниях W= Wk + Wп =½ kA2 = ½ mω02 A2.
На рисунке приведены графики зависимости от времени смещения х, скорости V, ускорения а, кинетической Wk и потенциальной Wп энергии гармонических колебаний при начальной фазе φ = 0. Из рисунка видно, частота изменения кинетической Wk и потенциальной Wп энергии при гармонических колебаниях вдвое больше частоты изменения смещения, скорости и ускорения.
Сопоставив уравнения
(1) и (2), видим, что
![]() ,
или
,
или
![]() . (3)
. (3)
Это линейное однородное дифференциальное уравнение второго порядка называют уравнением гармонических колебаний.
Колебательная система, совершающая гармонические колебания, называется гармоническим осциллятором. Если колебательная система, совершающая гармонические колебания, обладает одной степенью свободы (для характеристики положения достаточно одной координаты), то такая система называется линейным гармоническим осциллятором.
Для определения
характера движения механической системы
составляют уравнение движения системы
(исходя из законов динамики или закона
сохранения энергии). Если уравнение при
этом приводится к виду (3), то можно
однозначно утверждать, что данная
система совершает гармоническое
колебание, собственная частота
![]() которого равна корню квадратному из
коэффициента при х(t).
Воспользуемся этим методом для определения
циклических частот и периодов колебаний
пружинного и математического маятников.
которого равна корню квадратному из
коэффициента при х(t).
Воспользуемся этим методом для определения
циклических частот и периодов колебаний
пружинного и математического маятников.
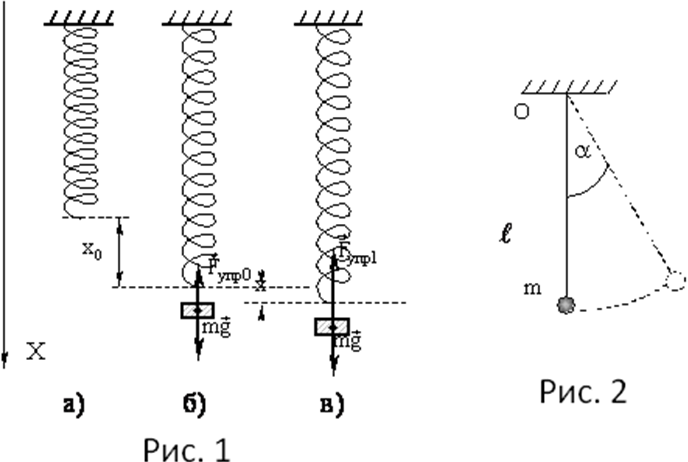
Рассмотрим сначала пружинный маятник (рис 1 б). Пусть подвешенное к пружине тело оттянуто от положения равновесия на расстояние х (рис.1.в), а затем предоставлено самому себе. На тело действуют сила тяжести и сила упругости. Под действием этих сил тело движется с ускорением. Запишем уравнение второго закона Ньютона для этого случая (рис.1.в)
![]() .
.
Это уравнение в
проекции на ось ОХ и с учетом того, что
для одномерного движения ускорение –
это вторая производная от координаты
по времени, то есть
![]() ,
запишется
,
запишется
![]() . (4)
. (4)
Величину силы
упругости
![]() ,
действующей на тело массой m,
найдем по формуле закона Гука
,
действующей на тело массой m,
найдем по формуле закона Гука
![]() .
(5)
.
(5)
После подстановки (5) в (4) получим
![]() (6)
(6)
Величину растяжения
пружины в положении равновесия
![]() (рис.1.а и 1.б) найдем из уравнения второго
закона Ньютона для неподвижного тела,
подвешенного к пружине
(рис.1.а и 1.б) найдем из уравнения второго
закона Ньютона для неподвижного тела,
подвешенного к пружине
![]() ,
,
![]() , (7)
, (7)
![]() ,
(8)
,
(8)
Из (7) и (8) следует, что
![]() .
(9)
.
(9)
После подстановки
(9) в (6) и приведения подобных слагаемых
получаем:
![]() ,
или
,
или
![]() (10)
(10)
Сравнив уравнения
(3) и (10), получим, что для пружинного
маятника
![]() .
.
![]()
![]() .
.
![]() (11)
(11)
Похожие рассуждения
можно провести для математического
маятника (рис.2) и показать, что
![]() .
.
![]()
![]() .
.
![]() (12)
(12)
Математический
маятник – это материальная точка на
невесомой и нерастяжимой нити длиной.
При гармонических колебаниях смещение
маятника от положения равновесия х
много меньше длины нити х <<
![]() ,
поэтому для угла отклонения нити от
вертикали
,
поэтому для угла отклонения нити от
вертикали
![]() имеет место соотношение
имеет место соотношение
![]()
Следовательно,
второй закон Ньютона для материальной
точки массы m:
ma
= F
можно записать в виде
![]() ,
где - ускорение точки, F
= mg
sin
,
где - ускорение точки, F
= mg
sin![]() =mg
=mg![]() - возвращающая сила. Знак минус в правой
части означает, что возвращающая сила
направлена противоположно смещению х.
- возвращающая сила. Знак минус в правой
части означает, что возвращающая сила
направлена противоположно смещению х.
Таким
образом, дифференциальное уравнение
гармонических колебаний математического
маятника
![]()
Сравнивая
это уравнение с уравнением (3), получаем
формулы для собственной частоты и
периода колебаний математического
маятника
 и
и
![]() .
.
Физический
маятник – это абсолютно твёрдое тело,
совершающее колебания относительно
горизонтальной оси О, не проходящей
через центр масс маятника С. Основное
уравнение динамики вращательного
движения для маятника Jε
= M,
где J
– момент инерции маятника относительно
горизонтальной оси проходящей через
точку О. Угловое ускорение маятника ε
![]() .
Момент силы тяжести маятника относительно
горизонтальной оси, проходящей через
точку О M
= mgd
sinφ,
где m
– масса маятника, d
= CO
– расстояние от оси до центра масс
маятника С. При малых углах отклонения
маятника от вертикали можно считать,
что
.
Момент силы тяжести маятника относительно
горизонтальной оси, проходящей через
точку О M
= mgd
sinφ,
где m
– масса маятника, d
= CO
– расстояние от оси до центра масс
маятника С. При малых углах отклонения
маятника от вертикали можно считать,
что
![]()
Подставляя
всё в уравнение второго закона Ньютона,
получаем
![]() .
.
Минус
означает, что момент возвращающей силы
противоположен угловому перемещению.
Отсюда получаем
![]()
Это
дифференциальное уравнение гармонических
колебаний физического маятника. Из
сравнения этого уравнения с уравнением
(3), находим период колебаний физического
маятника
![]()
Приведенная
длина физического маятника
![]() - это длина нити математического маятника,
у которого период колебаний совпадает
с периодом данного физического маятника.
- это длина нити математического маятника,
у которого период колебаний совпадает
с периодом данного физического маятника.
![]()
Колебания называются собственными, если они совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на колебательную систему.