

2.2. Пример выполнения ргр-2
Рассмотрим систему,
совершающую малые собственные колебания
около положения равновесия (рис.2.1).
Примем следующие обозначения элементов:
1 – груз массы
![]() ,
прикрепленный в точкеАк свисающей
с блока нити; 2 – бицилиндр массы
,
прикрепленный в точкеАк свисающей
с блока нити; 2 – бицилиндр массы![]() с радиусами
с радиусами![]() и радиусом инерции
и радиусом инерции![]() относительно его геометрической оси;
3 – тонкий однородный стержень массы
относительно его геометрической оси;
3 – тонкий однородный стержень массы![]() и длины
и длины![]() ;
4 – блок массы
;
4 – блок массы![]() (сплошной диск); 5 – каток массы
(сплошной диск); 5 – каток массы![]() (сплошной однородный цилиндр); 6 –
стержень, массой которого можно
пренебречь.
(сплошной однородный цилиндр); 6 –
стержень, массой которого можно
пренебречь.
Пусть в системе
(рис.2.1) известны:
![]() = 5 кг,
= 5 кг,![]() = 4 кг,
= 4 кг,![]() =1 кг,
=1 кг,![]() = 8 кг,
= 8 кг,![]() = 0,04 м,
= 0,04 м,![]() = 0,08 м,
= 0,08 м,![]() = 0,06 м,
= 0,06 м,![]() =0,45 м, а также коэффициент жесткости
пружины
=0,45 м, а также коэффициент жесткости
пружины![]() =2400 Н/м, начальное отклонение груза
1 по вертикали от положения его статического
равновесия
=2400 Н/м, начальное отклонение груза
1 по вертикали от положения его статического
равновесия![]() = 0,003 м и проекция начальной скорости
груза на вертикальную ось
= 0,003 м и проекция начальной скорости
груза на вертикальную ось![]() = 0,03м/с. Примем
= 0,03м/с. Примем![]() = 10 м2/с.
= 10 м2/с.
Найти уравнение движения груза при заданных начальных условиях, амплитуду, частоту, период его колебаний и построить графики колебаний для свободных и затухающих колебаний.
Рис. 2.1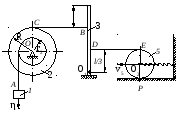
1.2.1. Свободные колебания
Система имеет одну
степень свободы (рис.2.1). За обобщенную
координату примем вертикальное отклонение
![]() груза 1 от положения статического
равновесия вниз. Все задаваемые силы,
приложенные к системе, имеют потенциал,
поэтому уравнение Лагранжа можно
записать в форме (2.7).
груза 1 от положения статического
равновесия вниз. Все задаваемые силы,
приложенные к системе, имеют потенциал,
поэтому уравнение Лагранжа можно
записать в форме (2.7).
Кинетическая энергия всей рассматриваемой системы
![]() .
(2.18)
.
(2.18)
Груз 1 движется поступательно, следовательно, его кинетическая энергия равна
![]()
где ![]() - неизвестная скорость перемещения
груза 1, равная обобщенной скорости
- неизвестная скорость перемещения
груза 1, равная обобщенной скорости ![]() .
.
Бицилиндрический
блок 2 вращается вокруг неподвижной оси
![]() с угловой скоростью
с угловой скоростью![]() .
Радиус инерции блока известен, поэтому
.
Радиус инерции блока известен, поэтому![]() .
Кинетическая энергия бицилиндра:
.
Кинетическая энергия бицилиндра:
 .
.
Стержень 3 вращается
вокруг неподвижной оси
![]() ,
тогда кинетическая энергия равна
,
тогда кинетическая энергия равна![]() .
Момент инерции стержня относительно
оси, проходящей через его конец, известен:
.
Момент инерции стержня относительно
оси, проходящей через его конец, известен:![]() .
Для нахождения угловой скорости
.
Для нахождения угловой скорости![]() стержня рассмотрим точкиВиС,
которые движутся практически с одинаковыми
скоростями (вследствие малости
рассматриваемых колебаний). Тогда
стержня рассмотрим точкиВиС,
которые движутся практически с одинаковыми
скоростями (вследствие малости
рассматриваемых колебаний). Тогда![]() .
Отсюда искомая угловая скорость
.
Отсюда искомая угловая скорость![]() .
Таким образом, кинетическая энергия
стержня 3 равна
.
Таким образом, кинетическая энергия
стержня 3 равна
 .
.
Каток 5 совершает
плоскопараллельное (плоское) движение,
состоящее из поступательного движения
вместе с полюсом О2и вращательного
движения вокруг последнего. Поэтому
кинетическая энергия этого катка:![]() ,
где
,
где![]() - кинетическая энергия поступательного
движения;
- кинетическая энергия поступательного
движения;![]() - то же для вращательной части плоского
движения.
- то же для вращательной части плоского
движения.
Мгновенный центр
скоростей (МЦС) катка находится в точке
Р, поэтому угловая скорость катка![]() определяется как отношение скорости
точкиЕк длине диаметраЕР:
определяется как отношение скорости
точкиЕк длине диаметраЕР:![]() ,
где
,
где![]() - радиус катка 5. Скорость
- радиус катка 5. Скорость![]() ,
тогда
,
тогда![]() .
Для нахождения кинетической энергииТпопределим скорость
поступательного движения катка
.
Для нахождения кинетической энергииТпопределим скорость
поступательного движения катка![]() .
С учетом этого имеем:
.
С учетом этого имеем:
 .
.
Теперь найдем
![]() ,
где
,
где![]() - момент инерции катка 5 относительно
МЦС (точка Р). Как известно,
- момент инерции катка 5 относительно
МЦС (точка Р). Как известно,![]() ,
где
,
где![]() - момент инерции катка 5 относительно
его центра тяжести (точкаО2):
- момент инерции катка 5 относительно
его центра тяжести (точкаО2):![]() .
С учетом последнего имеем:
.
С учетом последнего имеем:![]() .
Тогда кинетическая энергия будет равна:
.
Тогда кинетическая энергия будет равна:
 .
.
Теперь полная кинетическая энергия катка определится следующим образом:
![]() .
.
В соответствии с формулой (1.18) кинетическая энергия рассматриваемой системы будет равна
 .
.
Выражение, стоящее
в скобках, назовем приведенной массой
системы и обозначим
![]() .
Причем
.
Причем![]() .
Вычислим приведенную массу для нашего
случая
.
Вычислим приведенную массу для нашего
случая
![]() кг.
кг.
В результате
получим для кинетической энергии всей
системы:
![]() .
.
Потенциальная
энергия системы определяется работой
сил тяжести системы и силы упругости
пружины на перемещении системы из
отклоненного положения, когда груз 1
имеет координату
![]() ,
в положение статического равновесия.
При таком отклонении вес блока и вес
катка работы не производят, поэтому
потенциальная энергия всей системы
равна
,
в положение статического равновесия.
При таком отклонении вес блока и вес
катка работы не производят, поэтому
потенциальная энергия всей системы
равна
![]() , (2.19)
, (2.19)
где
![]() - потенциальная энергия пружины.
- потенциальная энергия пружины.
Очевидно, что
![]() .
Знак минус ставится потому, что груз 1
из положения статического равновесия
отклоняется вниз при положительном
.
Знак минус ставится потому, что груз 1
из положения статического равновесия
отклоняется вниз при положительном![]() .
Точно также (см. рис.2.2)
.
Точно также (см. рис.2.2)![]() ;
из рис.1.2 видно, что
;
из рис.1.2 видно, что![]() .
.
Поскольку
рассматриваются малые колебания системы,
угол
![]() весьма мал и, следовательно, синус в
последнем выражении можно заменить
непосредственно углом. Тем самым в
разложении синуса в ряд сохраняется
лишь один член. В теории малых колебаний
большая точность не нужна, ибо потенциальную
энергию необходимо вычислять с точностью
до величин второго порядка малости
относительно обобщенной координаты.
весьма мал и, следовательно, синус в
последнем выражении можно заменить
непосредственно углом. Тем самым в
разложении синуса в ряд сохраняется
лишь один член. В теории малых колебаний
большая точность не нужна, ибо потенциальную
энергию необходимо вычислять с точностью
до величин второго порядка малости
относительно обобщенной координаты.
Таким образом,
имеем
![]() .
Для нахождения угла
.
Для нахождения угла![]() воспользуемся формулой
воспользуемся формулой![]() .
Смещение
.
Смещение![]() с принятой точностью совпадает с
перемещением точки, лежащей на поверхности
блока, т.е.
с принятой точностью совпадает с
перемещением точки, лежащей на поверхности
блока, т.е.![]() .
Тогда
.
Тогда
 .
.
Следовательно, .
.
Потенциальная энергия пружины
![]() ,
,
где ![]() - перемещение точки
- перемещение точки ![]() из положения, соответствующего условию
из положения, соответствующего условию
![]() ;
;
![]() - статическая деформация пружины.
- статическая деформация пружины.
Перемещение
![]() вдвое меньше смещения точкиЕ,
которое, в свою очередь, равно перемещению
точкиD. Таким образом,
имеем
вдвое меньше смещения точкиЕ,
которое, в свою очередь, равно перемещению
точкиD. Таким образом,
имеем
![]() .
.
После несложных преобразований получим
 .
.
С учетом выражения (2.19) получаем выражение для определения потенциальной энергии всей системы
 .
(2.20)
.
(2.20)
В положении,
соответствующем
![]() ,
система находится в равновесии, поэтому
должно выполняться условие:
,
система находится в равновесии, поэтому
должно выполняться условие:
![]() .
.
Тогда из (2.9) получаем
![]() .
(2.21)
.
(2.21)
Отсюда можно найти статическую деформацию пружины. С помощью формулы (1.10) выражение (1.9) упрощается и принимает вид
 .
(2.22)
.
(2.22)
Выражение в скобках
в (1.22) обозначим
![]() и назовем квазиупругим коэффициентом.
Заметим, что
и назовем квазиупругим коэффициентом.
Заметим, что![]() .
После вычислений получим, что
рассматриваемом случае квазиупругий
коэффициент равен
.
После вычислений получим, что
рассматриваемом случае квазиупругий
коэффициент равен
![]() Н/м.
Н/м.
Таким образом, потенциальная энергия системы равна
![]() .
.
Для использования уравнения Лагранжа необходимо найти производные от кинетической и потенциальной энергий:
![]() .
(2.23)
.
(2.23)
Подставляя (1.23) в формулу (1.7), получим
![]() ,
(2.24)
,
(2.24)
где ![]() рад/с;
рад/с;
![]() с;
с;
![]() Гц.
Гц.
Решением уравнения (1.24) при известном значении kбудет
![]() см
см
или, согласно выражению (2.12),
![]() см.
(2.25)
см.
(2.25)
 График
свободных колебаний системы, согласно
закону (2.25), приведены на рис.2.3.
График
свободных колебаний системы, согласно
закону (2.25), приведены на рис.2.3.
Рис.2.3