

4.6. Дифференцирующее звено
Уравнение динамики
![]() илиY(p) = kpX(p).
илиY(p) = kpX(p).
Передаточная функция
![]() .
.
Частотные характеристики: АФЧХ
![]() (рис.4.6, а);
АЧХA() = k;
ФЧХ
(рис.4.6, а);
АЧХA() = k;
ФЧХ![]() (рис.4.6,б).
(рис.4.6,б).
При подаче единичной ступенчатой функции
на вход на выходе получаем![]() (рис.4.6,в).
(рис.4.6,в).
В связи с тем, что производная при ступенчатых возмущениях пропорциональна -функции, т.е. импульс имеет бесконечно большую амплитуду, дифференцирующее звено в идеале физически не реализуемо.
Реальное дифференцирующее
звено имеет передаточную функцию![]() и переходную
характеристику
и переходную
характеристику![]() (рис.4.6,г).
(рис.4.6,г).
4.7. Звено с запаздыванием
Уравнение динамики
![]() где
– время запаздывания.
где
– время запаздывания.
Преобразуем это уравнение по Лапласу, сделав замену переменной = t–илиt = + :
![]() .
.
Передаточная функция
![]() .
.
Частотные характеристики: АФЧХ
![]() (рис.4.7, а);
АЧХA() = 1;
ФЧХ() = –(рис.4.7,б).
(рис.4.7, а);
АЧХA() = 1;
ФЧХ() = –(рис.4.7,б).
Переходная характеристика h(t) = 1(t–) (рис.4.7,в).
З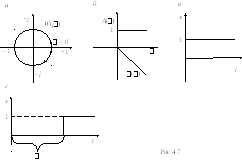 аметим,
что звено с запаздыванием является
неминимально-фазовым, так как усилительное
звено сA() = 1
дает сдвиг фаз, равный нулю, а звено с
запаздыванием имеет сдвиг фаз, отличный
от нуля и пропорциональный времени.
аметим,
что звено с запаздыванием является
неминимально-фазовым, так как усилительное
звено сA() = 1
дает сдвиг фаз, равный нулю, а звено с
запаздыванием имеет сдвиг фаз, отличный
от нуля и пропорциональный времени.
4.8. Полуинерционное звено
Некоторые объекты управления характеризуются показателями, которые являются функциями не только времени, но и преобразованных координат, и описываются уравнениями в частных производных. Такие объекты встречаются в различных тепловых, диффузионных и электромагнитных устройствах. В этом случае зависимость переменных может носить степенной характер и в дифференциальном уравнении может появиться слагаемое, содержащее переменную (временную или пространственную) в дробной степени. Например, еслиf(t) = t, где 1 >> –1, но0,то изображение этой функции
![]() .
(4.1)
.
(4.1)
Произведем замену переменных pt = ,
тогда![]() и
и![]() ,
и выражение (4.1) примет вид
,
и выражение (4.1) примет вид
![]() .
(4.2)
.
(4.2)
Интеграл в выражении
(4.2) является функцией .
В частности, можно показать, что при = –1/2он
равен
![]() ,
при = 1/2
равен
,
при = 1/2
равен
![]() ,
а при = 1
равен 1. Тогда, воспользовавшись (4.2),
получим
,
а при = 1
равен 1. Тогда, воспользовавшись (4.2),
получим
 ;
; .
.
Таким образом, ДУ, содержащее слагаемое
в дробной степени, после преобразования
по Лапласу может содержать
![]() .
Тогда передаточная функция
.
Тогда передаточная функция
![]() .
(4.3)
.
(4.3)
В частности,W(p) =![]() – полуинерционное звено.
– полуинерционное звено.
Передаточная функция
вида (4.3)называется
иррациональной
передаточной функцией.
Изображение
выходной величиныY(p) = W(p)X(p).
ПриХ(р) =1/рполучимН(р)![]() .
Произведязамену
переменных
.
Произведязамену
переменных![]() ,найдем псевдоизображение
H(s) = k/[(Ts + 1)s2],которое дает
возможность найти оригиналh(t).
,найдем псевдоизображение
H(s) = k/[(Ts + 1)s2],которое дает
возможность найти оригиналh(t).
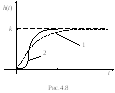
На рис.4.8для сравнения приведены переходные функции инерционного (кривая 1) и полуинерционного (кривая 2) звеньев.
5. Структурные схемы асу
Часто АСУ можно рассматривать как комбинацию динамических звеньев с определенными передаточными функциями. Графическое изображение АСУ в виде совокупности динамических звеньев с указанием их передаточных функций и связей между звеньями называется структурной схемой. По существу эта схема представляет собой графическое изображение системы уравнений, записанных в виде передаточных функций, и может рассматриваться как схема прохождения и преобразования сигналов в АСУ. В этой связи она часто называетсяалгоритмической.