

3.2. Решение ду с помощью преобразования Лапласа
Применение преобразования Лапласа позволяет перейти от решения системы ДУ к решению системы алгебраических уравнений. Кроме того, исключается необходимость определения постоянных интегрирования, т.к. их учитывают при применении преобразования Лапласа, а общее решение неоднородного ДУ при любой правой части определяется сразу, т.е. исключается раздельное нахождение y1(t) иy2(t).
Пусть f(t)
– действительная функция действительного
переменногоt, удовлетворяющая
условиям Дирихле (непрерывна и
дифференцируема на рассматриваемом
интервале) и равная нулю приt< 0.
Будем называть эту функциюоригиналом.
Каждому оригиналуf(t)
всегда можно поставить в соответствие
функциюF(p) комплексного
переменного![]() ,
определенную как интеграл вида
,
определенную как интеграл вида
![]() (3.4)
(3.4)
или
![]() ,
,
где L– преобразование Лапласа.
Правая часть (3.4) называется прямым преобразованием Лапласафункцииf(t), а функцияF(p) –изображением Лапласа.
В таблице представлены Лапласовы изображения некоторых функций.
|
Оригинал |
Изображение по Лапласу |
|
f(t) = A |
|
|
f(t) = 1(t) |
|
|
f(t) = (t) |
|
Приведем основные свойства преобразования Лапласа.
1. Свойство линейности. Изображение алгебраической суммы нескольких функций равно сумме изображений этих функций:
 .
(3.5)
.
(3.5)
Справедливость выражения (3.5) вытекает из определения (3.4), в соответствии с которым преобразование Лапласа представляет собой линейную операцию.
2. Дифференцирование оригиналов.Производной от функцииf(t) соответствует разность изображений этой функцииF(p), умноженной наp, и ее начального значенияf(0):
![]() .
(3.6)
.
(3.6)
Действительно, умножив (3.4) на p, получим

![]() .
.
Выполнив этот прием nраз, получим
![]() .
(3.7)
.
(3.7)
Выражение (3.7) является математической записью теоремы дифференцирования. При нулевых начальных условиях выражение (3.7) принимает вид
![]() .
.
3. Изображение интеграла. Можно показать, что
 .
.
Рассмотрим методику интегрирования линейных ДУ с постоянными коэффициентами. В соответствии со свойствами 1 и 2, ДУ в области вещественного переменного tпреобразуются в области комплексного переменногоpв алгебраическое выражение. При этом автоматически учитываются начальные условия и определяются постоянные интегрирования. Имеем
![]() .
(3.8)
.
(3.8)
Умножив (3.8) на
![]() после интегрирования его поtв
пределах от 0 допри нулевых начальных условиях, получим
это уравнение, преобразованное по
Лапласу:
после интегрирования его поtв
пределах от 0 допри нулевых начальных условиях, получим
это уравнение, преобразованное по
Лапласу:
![]() .
.
Отсюда
 .
(3.9)
.
(3.9)
Обозначим
![]() .
Тогда (3.9) перепишется в видеY(p) = W(p)X(p),
откуда
.
Тогда (3.9) перепишется в видеY(p) = W(p)X(p),
откуда
![]() .
(3.10)
.
(3.10)
Выражение (3.10), т.е. отношение изображения выходной переменной системы Y(p) к изображению входной переменнойX(p) при нулевых начальных условиях, называетсяпередаточной функциейсистемы.
Поскольку при исследовании динамических свойств системы требуется определить зависимость переменных в функции действительного аргумента t, возникает обратная задача: как от изображения переменной перейти к ее оригиналу.
Наиболее общим способом нахождения оригинала y(t) по известному изображениюY(p) является применение обратного преобразования Лапласа:
![]() .
(3.11)
.
(3.11)
Для большинства типовых изображений обратное преобразование Лапласа табулировано, поэтому наиболее простым способом нахождения оригинала по изображению является использование таблиц, в которых для наиболее распространенных функций y(t) приведены соответствующие изображенияY(p).
Представим Y(p) дробно-рациональной функцией вида
![]() ,
,
где B(p) иA(p) – полином соответственно m-й иn-й степени, причемm<n.
Тогда оригинал y(t) находим по теореме разложения Хевисайда – Карсона:
![]() ,
(3.12)
,
(3.12)
где pk– корни уравненияA(p) = 0;![]() .
.
➢ Пример 4. Пусть ДУ системы имеет вид
![]() .
.
Требуется найти W(p),w(t),h(t).
![]() .
Откуда передаточная функция будет
.
Откуда передаточная функция будет
![]() .
.
Пусть k = 1, a0 = 1, a1 = 3, a2 = 2. Для нахождения функции весаw(t) воспользуемся теоремой разложения. При этом учтем, чтоL{(t)} = 1. Тогда
![]() .
(3.13)
.
(3.13)
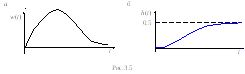
Имеем A(p) = a0p2 + a1p + a2 = p2 + 3p + 2 = 0; p1 = –1; p2 = –2; A(p) = 2p + 3; B(p) = k = 1. Тогда, подставивB(p),A(p),p1иp2в выражение (3.13), получим (рис.3.5,а)
![]() .
.
Аналогичным образом находим переходную характеристику (рис.3.5, б), при этом учитываем, чтоL{1(t)} = 1/р, тогдаA(p) = (p2 + 3p + 2)р = 0;p1 = –1;p2 = 2;p3 = 0;A(p) = 3p2 + 2р + 2. Воспользовавшись (3.12), найдем
![]() .
.