

7. Анализ качества процесса управления
Анализ качества процесса не менее важен, чем анализ устойчивости системы, так как качество процесса управления определяет поведение АСУ при переходе из одного состояния (начального) в другое (конечное), и в конечном итоге характеризуется размером ошибки, равной разности между текущим и заданным значениями управляемой величины.
Изменение состояния АСУ возникает в результате внешних воздействий, которые в общем случае являются произвольной функцией времени и могут быть приложены со стороны нагрузки, что характерно для систем стабилизации, или со стороны управляющего сигнала (следящие системы). В первом случае система должна минимально реагировать на воздействие по нагрузке – инвариантнаязадача. Во втором, для следящей системы, управление должно воспроизводиться с минимальной ошибкой –ковариантная задача.
Методы анализа качества процесса управления делятся на две группы: прямые, при которых качество процесса оценивается непосредственно по кривой переходного процесса, и косвенные, оцениваемые по критериям качества.
7.1. Прямые методы
Кривая переходного процесса строится на основании решения уравнения движения системы или по данным эксперимента.
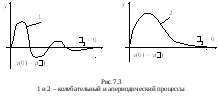
Переходный процесс устойчивой системы всегда затухает и, в зависимости от характера затухания, подразделяется на монотонный (апериодический) и колебательный (рис.7.1). При этом имеется в виду, что на вход системы (со стороны задающего воздействия) подано ступенчатое возмущениеy*(t) = 1(t), соответствующее изменению задания.
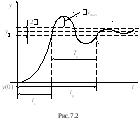
Обычно качество переходного процесса оценивается по нескольким показателям (рис.7.2).

 ремя
первого согласованияtc–
время, по истечении которого управляемая
величина первый раз достигает своего
установившегося значения. Этот показатель
также характеризует скорость протекания
процесса в начальный период.
ремя
первого согласованияtc–
время, по истечении которого управляемая
величина первый раз достигает своего
установившегося значения. Этот показатель
также характеризует скорость протекания
процесса в начальный период.
Перерегулирование– отношение максимального отклонения
управляемой величины к своему
установившемуся значению в процентах![]() .
.
Число перерегулированийnв течение времениtpичастотаколебанийк = 2/Tк.
Для процессов обоих типов (кривые 1 и 2 рис.7.1) существует оценка точности работы АСУ в установившемся режиме. Пусть при номинальном режиме y(0) = y* = 0, т.е. рассматриваем уравнение движения системы в отклонениях отy*. Тогда статическая ошибка() = y() –y(0) =y(). Значениеy() можно найти, воспользовавшись теоремой о конечном значении. В соответствии с теоремой дифференцирования имеем
L{y'(t)} = pY(p) –y(0)
или![]() .
(7.1)
.
(7.1)
Взяв предел от (7.1), при p0 получим
![]() .
.
Таким образом,
![]() .
(7.2)
.
(7.2)
![]() ,
тогда
,
тогда
![]() .
(7.3)
.
(7.3)
Заметим, что если от выражения (7.1) взять предел при p, то
![]() .
(7.4)
.
(7.4)
Выражения (7.3) и (7.4) являются теоремами соответственно о конечном и начальном значениях оригинала y(t).
Напомним, что для статических систем () = 0, а для астатических –() = 0.
Переходные процессы для астатических систем при подаче возмущения со стороны нагрузки представлены на рис.7.3.