

Здесь будет лист со штампом Общесистемный раздел
В настоящем разделе рассматриваются вопросы компенсации реактивной мощности промышленных сетей, проводится анализ известных автоматических устройств компенсации реактивной мощности. Выделены основные задачи, решаемые при проектировании микропроцессорных устройств управления, описана система автоматизированного проектирования PCAD, используемая для разработки контроллера - компенсатора реактивной мощности.
1.1. Компенсация реактивной мощности
Мероприятия по компенсации реактивной мощности приобретают в современных условиях всевозрастающее значение. Они являются одним из эффективных средств, направленных на решение важнейшей задачи – экономии топливно-энергетических ресурсов.
Компенсация реактивной мощности обеспечивает разгрузку генераторов электростанций, питающих и распределительных сетей и трансформаторов от реактивных токов и тем самым уменьшение потерь мощности, электроэнергии и напряжения в линиях и трансформаторах и, следовательно, увеличение их пропускной способности [1].
Остановимся кратко на физической сущности реактивной мощности и возможности её компенсации.
 Проблема
появления и компенсации реактивной
мощности возникает только в сетях
переменного тока. Известно, что прохождение
переменного тока всегда сопровождается
возникновением переменного, пульсирующего
с частотой тока магнитного потока.
Пульсация (изменение) магнитного потока
неизбежно сопровождается возникновением
электродвижущей силы самоиндукции,
действие которой всегда направлено
против изменений тока, проходящего в
электрической цепи. Это и является
индуктивной нагрузкойXL
,
вызывающей
отставание во времени изменений
переменного тока от изменений переменного
напряжения на так называемый угол сдвига
фаз
.
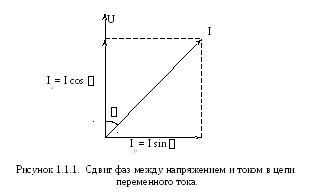
На рисунке 1.1.1. приведена векторная
диаграмма мгновенных значений напряжения
и тока в цепи переменного тока с
индуктивной нагрузкой.
Проблема
появления и компенсации реактивной
мощности возникает только в сетях
переменного тока. Известно, что прохождение
переменного тока всегда сопровождается
возникновением переменного, пульсирующего
с частотой тока магнитного потока.
Пульсация (изменение) магнитного потока
неизбежно сопровождается возникновением
электродвижущей силы самоиндукции,
действие которой всегда направлено
против изменений тока, проходящего в
электрической цепи. Это и является
индуктивной нагрузкойXL
,
вызывающей
отставание во времени изменений
переменного тока от изменений переменного
напряжения на так называемый угол сдвига
фаз
.
На рисунке 1.1.1. приведена векторная
диаграмма мгновенных значений напряжения
и тока в цепи переменного тока с
индуктивной нагрузкой.
Индуктивная нагрузка, вызываемая явлением самоиндукции, в цепи переменного тока всегда имеет место, так как для прохождения переменного тока проводники цепи представляют не только активное R, но и индуктивное XL сопротивления. Основное индуктивное сопротивление или индуктивную нагрузку в сетях переменного тока представляют машины и аппараты, действие которых основано на использовании магнитного потока: трансформаторы, реакторы, электродвигатели, индукционные электрические печи и т.п. Они и являются основными потребителями индуктивной, или, как принято называть, реактивной, мощности Q.
 Таким
образом, в сети переменного тока имеются
потребители активнойP
и реактивной
Q
мощности.
Потребителями активной мощности являются
потребители, предназначенные для
преобразования энергии электрического
тока в механическую работу (электродвигатели),
в тепло (электрические печи, нагревательные
приборы), в свет (источники света), в
химические реакции (электролиз,
гальваника). Активная мощность выражается
формулой для однофазного тока
Таким
образом, в сети переменного тока имеются
потребители активнойP
и реактивной
Q
мощности.
Потребителями активной мощности являются
потребители, предназначенные для
преобразования энергии электрического
тока в механическую работу (электродвигатели),
в тепло (электрические печи, нагревательные
приборы), в свет (источники света), в
химические реакции (электролиз,
гальваника). Активная мощность выражается
формулой для однофазного тока
и для трёхфазного тока
для трёхфазного тока
Из рисунка 1.1.1. видно, что I cos = Ia, где Ia представляет собой активную составляющую полного тока, совпадающую по фазе с напряжением сети, а I cos = Ip, где Ip – реактивная составляющая тока, отстающая от напряжения сети на угол 90.
Реактивная мощность Q в цепи переменного тока необходима для создания магнитного потока в трансформаторах, электродвигателях и других потребителях, а также для преодоления индуктивного сопротивления проводников цепи переменного тока. При отсутствии устройств для компенсации реактивной мощности её вынуждены давать генераторы электрических станций. Но так как обмотка генераторов рассчитана из условий допустимого нагрева на определённую силу тока, а механическая часть генераторов и первичных двигателей – на определённую активную мощность, то наличие с сети реактивной мощности и, следовательно, реактивного тока Ip приводит, с одной стороны, к недоиспользованию обмотки генераторов по активному току и, следовательно, к недоиспользованию генераторов и первичных двигателей по активной мощности, на которую они рассчитаны, а с другой – реактивная составляющая тока, проходя по всем элементам сети от генераторов до потребителей, вызывает дополнительные потери мощности, электроэнергии и напряжения.
Рассмотрим основные потребители реактивной мощности промышленных сетей и их особенности.