

2.5.2. Принцип управления конденсаторной установкой
Компенсация реактивной мощности осуществляется путем подключения к сети конденсаторов.
Микропереключателями на контроллере устанавливаются заданное значение угла ФИ, его знак ("-" индуктивный квадрант, "+" емкостной квадрант), интервал дискретности управления в секундах, зона нечувствительности управления в градусах. С помощью потенциометра на контроллере устанавливается значение тока, при котором контроллер должен отключить все конденсаторы.
Контроллер вычисляет средние значения тока, напряжения и угла ФИ на интервале управления. При угле ФИ меньше заданного контроллер отключает один конденсатор. Если угол ФИ больше заданного, то вычисляется на сколько больше. Если эта величина меньше зоны нечувствительности, то ничего не происходит (управление не вырабатывается), а если больше - контроллер подключает один конденсатор. И так на каждом интервале управления. В результате через несколько интервалов получим угол ФИ в сети близкий к заданному (с учетом нечувствительности).
Если ток в сети снизился за нижний предел (обеденный перерыв, конец рабочего дня, выходной день и т.п.), то контроллер по одному отключает все конденсаторы от сети. Если напряжение сети больше предельного значения 380В+10% контроллер также последовательно отключает все конденсаторы.
Следующие рисунки поясняют алгоритм управления, реализуемый контроллером-компенсатором.
Управление по току
|
Imin |
|
Imin + Нечувст |
|
800 |
820 |
ток |
|
Отключать |
Ничего |
регулировать |
|
емкости |
Не делать |
ФИ |
Управление по напряжению
|
Umax-Нечувст |
|
Umax |
|
1330 |
1345 |
напряжение |
|
регулировать |
ничего |
отключать |
|
ФИ |
не делать |
емкости |
Управление по углу ФИ
индуктивный квадрант - емкостной квадрант +
|
ФИзад-Нечувст |
|
ФИзад |
|
|
|
угол ФИ |
|
включать |
ничего |
отключать |
|
емкости |
не делать |
емкости |
2.6. Программное обеспечение контроллера
2.6.1. Структура программного обеспечения
ПО функционирует в реальном масштабе времени с прерываниями от сети (TRAP) и таймера (RST 7.5).
Структура программного обеспечения представлена на рисунке 2.6.1.1. и включает следующие компоненты:
основная программа;
подпрограмма обработки прерывания TRAP;
подпрограмма обработки прерывания RST 7.5;
комплекс подпрограмм типа BIOS.
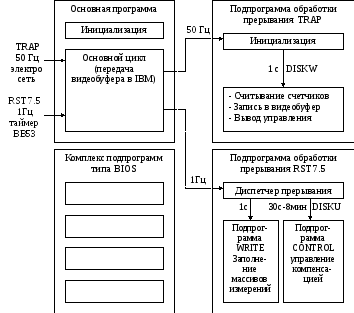
Рисунок 2.6.1.1. Структурная схема рабочего программного обеспечения контроллера-компенсатора.
2.6.1.1. Основная программа
Этот раздел ПО включает следующие части:
инициализация программируемых БИС и считывание микропереключателей;
основной цикл программы.
Инициализация программируемых БИС
Это часть программы отрабатывает сразу по включению контроллера до того как придет первый запрос немаскируемого прерывания TRAP. За это время выполняется:
установка стека;
очистка ОЗУ;
программирование параллельного интерфейса КР580ВВ55А, двух таймеров КР580ВИ53, последовательного интерфейса КР580ВВ51А;
считывается состояние микропереключателей на плате контроллера и определяются дискретность управления, заданное значение угла ФИ, зона нечувствительности;
разрешаются прерывания микропроцессора.
Основной цикл программы
В этом цикле находится программа пока не приходят запросы прерывания TRAP и RST 7.5. В цикле осуществляется передача видеобуфера контроллера через интерфейс RS-232C на ПЭВМ (если есть) и подсветка светодиодов.