

Содержание
|
3
4 9 10 13 13 14 14 15 19 22
29 32 33 |
Электрические измерительные устройства для измерения больших линейных и угловых перемещений обычно строятся по принципу сравнения измеряемой величины с многозначной мерой, которая представляет собой совокупность однородных элементов, образующих периодическую структуру. Линейное или угловое расстояние между элементами меры называют ее шагом. По своей физической природе многозначные меры могут быть емкостными, индуктивными, оптическими и именуются емкостными или индуктивными рейками и винтами, растровыми решетками, штриховыми линейками и т. д. Меру связывают с органом машины, перемещение которого подлежит измерению. Наряду с такой многозначной мерой (называемой обычно измерительной) в состав системы входит индикаторный элемент, воспринимающий информацию о перемещении подвижного органа на шаг измерительной меры, и электронный логический блок, преобразующий эту информацию в удобный для визуального восприятия и дальнейшего использования вид. Таким образом, перемещение, зафиксированное измерительной системой,
|
|
|
где т — количество шагов меры, отсчитанных индикаторным элементом при перемещении подвижного органа; g — шаг меры.
Подобные измерительные устройства получили названия устройств прямого преобразования, или накапливающих. Очевидно, что их разрешающая способность, т. е. минимальное перемещение, которое может быть измерено и зафиксировано, равно шагу меры. Если он достаточно велик, то разрешающая способность измерительного устройства оказывается невысокой.
Поэтому часто используют устройства, в которых отсчитывается не только целое число шагов, но и дробная доля шага. Подобные измерительные устройства получили название интерполяционных. Они описываются уравнением
|
|
|
где
![]() — доля шага меры.
— доля шага меры.
Интерполяционные системы содержат две ступени: грубую, которая отсчитывает целое число шагов, и точную, определяющую положение индикаторного элемента внутри шага. Заметим, что точная и грубая ступени могут быть построены с использованием мер различной физической природы.
Индуктивные меры и измерительные устройства на их основе
В практике измерения больших перемещений значительное распространение получили несколько типов индуктивных преобразователей.
Схема индуктивного преобразователя с проходным зубчатым якорем показана на рис.1. Преобразователь состоит из зубчатого якоря (рейки) 1, выполненного из ферромагнитного материала и играющего роль индуктивной меры, и сердечника 2 с обмоткой 3 (индикаторного элемента). Если зубья рейки находятся против зубьев сердечника, магнитный поток, создаваемый катушкой, замыкается через воздушный зазор между вершинами зубьев. Поскольку этот зазор мал, то индуктивность катушки максимальная. Если же зубья рейки располагаются против впадин сердечника, то вследствие резкого увеличения воздушного зазора, индуктивность катушки становится минимальной.

Рис.1
Таким образом, при взаимном перемещении рейки и сердечника, индуктивность катушки будет периодически изменяться от максимального до минимального значения. Период изменения индуктивности равен шагу меры Т. Преобразуя изменение индуктивности в электрический сигнал и подсчитывая количество его экстремальных значений, можно определить перемещение.
Чаще по этой схеме строят дифференциальные преобразователи, в которых используется два индикаторных элемента (сердечника), сдвинутых на половину шага меры относительно друг друга. При симметричном расположении сердечников относительно меры значения индуктивности катушек сердечника равны. Смещение сердечников из нейтрального положения ведет к увеличению индуктивности одной катушки и уменьшению индуктивности другой. Во время движения индикаторных элементов нулевое значение разности индуктивности повторяется с периодом, равным половине шага меры. Подсчитывая количество переходов через нуль соответствующего сигнала электрической схемы, в которую включены катушки, можно определить перемещение подвижного органа.
Проходные преобразователи с зубчатым якорем позволяют измерить перемещение с невысокой разрешающей способностью — она равна шагу меры или его половине (для простых и дифференциальных преобразователей соответственно). Недостатком таких преобразователей является наличие механических усилий между якорем и сердечником. Если же якорь выполнить в форме винта, а сердечники — в виде гаек, то усилие на якорь будет равно нулю, а точность измерения повысится. При вращении винта-якоря его зубцы смещаются относительно зубцов, сердечников — повороту якоря на один оборот соответствует смещение зубцов на один шаг Т.
Если на один из концов якоря надеть лимб с делениями или преобразователь углового смещения, то можно контролировать, на сколько повернулся якорь (а это соответствует линейному перемещению в пределах одного шага Т), т. е. можно осуществить внутришаговое деление. Если, например, требуется отсчитать перемещение, равное 14, 125Т, то количество целых шагов 14Т отсчитывают по числу нулевых показаний прибора, включенного на выходе измерительной схемы, а внутришаговый размер 0,125Т набирают поворотом якоря на 45°. Точность измерения внутришаговых перемещений определяется в основном внутришаговой погрешностью резьбы винтового якоря и сердечников.
Описанные выше индуктивные преобразователи позволяют измерять перемещения с точностью до 5-40 мкм. Более высокую разрешающую способность имеют преобразователи, основанные на фазовом принципе.

Рис.2
Схема одного из таких преобразователей приведена на рис.2. Он состоит из якоря 5, жестко связанного с контролируемым объектом, и четырех неподвижных сердечников 1-4. Сердечники 2 и 4 сдвинуты относительно сердечников 1 и 3
на
целое число половин шага Т
резьбы преобразователя:
![]() .
Сдвиг
пары сердечников 3-4
относительно
сердечников 1-2
равен
.
Сдвиг
пары сердечников 3-4
относительно
сердечников 1-2
равен
![]() .
На
каждой паре сердечников располагаются
обмотки возбуждения z1
и
z2
,
которые включают в сеть переменного
тока. Дополнительно на каждом сердечнике
размещаются вторичные обмотки z1’;
z1”;
z2’;
z2”
соответственно.
.
На
каждой паре сердечников располагаются
обмотки возбуждения z1
и
z2
,
которые включают в сеть переменного
тока. Дополнительно на каждом сердечнике
размещаются вторичные обмотки z1’;
z1”;
z2’;
z2”
соответственно.
Катушка возбуждения создает в сердечнике преобразователя магнитный поток Ф1(Ф2), разветвляющийся в выступах на составляющие Ф1’;Ф1”(Ф2’;Ф2”). При перемещении якоря относительно сердечников на 8 изменятся воздушный зазор и соответственно магнитные потоки Ф1’;Ф1”;Ф2’;Ф2”.
|
|
1.1
1.2
1.3
1.4 |
где
Фm
— амплитудное значение потоков
Ф1
(Ф2)
;
![]() — половина амплитуды отклонения
магнитного потока в одном выступе за
один шагТ;
— половина амплитуды отклонения
магнитного потока в одном выступе за
один шагТ;
![]() —круговая
частота напряжения сети.
—круговая
частота напряжения сети.
Потоки Ф1’ и Ф1”(Ф2’ и Ф2”) наводят во вторичных катушках напряжения U1’ и U1”(U2’ и U2”). Если катушки соединить встречно и последовательно, то разностное напряжение, измеренное на зажимах ab(cd), будет равно:
|
|
1.5
1.6 |
где W — число обмоток во вторичной катушке.
Продифференцировав выражения (1.1) и (1.2) и подставив значение производных в формулы (1.5) и (1.6), получим
|
|
|
Итак, на выходе преобразователя получим два значения напряжения с частотой сети и с амплитудой, периодически изменяющейся в функции перемещения о Напряжения эти сдвинуты одно относительно другого на 1/4 шага резьбы преобразователя (рис. 3, а). При этом характеристика преобразователя может быть разбита в пределах каждого шага на четыре равных (относительно) линейных участка. Если из измеренного значения перемещения вычесть целое число четвертей шага, то остаток можно будет измерить на одном из линейных участков.

Рис.3
Наибольший
интерес данный преобразователь
представляет в качестве одной из
реализаций фазового принципа. Если
напряжение Ucd
сдвинуть
по фазе на
![]() ,
а затем просуммировать с напряжениемUаЬ
, то
,
а затем просуммировать с напряжениемUаЬ
, то
|
|
|
где
![]() .
.
Таким
образом, фаза выходного напряжения
линейно зависит от контролируемого
перемещения, изменяясь в пределах шага
преобразователя от 0
до 2![]() (рис. 3, б).
(рис. 3, б).
Построенный на этом принципе отечественный индуктивный преобразователь типа РС-2 обеспечивает измерения в диапазоне 125—960 мм с погрешностью не более 1,5 мкм.
Широкое распространение получил другой тип фазового преобразователя — индуктосин , который используется для измерения как угловых, так и линейных перемещений.
Основными частями линейного индуктосина являются статор (индуктивная мера) и ротор (индикаторный элемент). Они представляют собой стеклянные линейки, на которые нанесены плоские обмотки (рис. 4). На статоре 1 они соединены в непрерывную цепь АВ, имеющую выводы на концах, на роторе 2 они образуют две цепи СD и ЕF, сдвинутые относительно друг друга на половину шага витков обмотки.
Статор крепится обычно к неподвижному органу станка, а ротор — к подвижному. Элементы индуктосина устанавливают с небольшим зазором между собой. Цепи СD и ЕF питаются напряжениями, которые сдвинуты по фазе на 90°, выходное напряжение снимается с цепи АВ. Возможен и другой вариант питания индуктосина со стороны статора.

Рис.4
В том случае, когда каждый проводник одной обмотки находится на равном расстоянии от двух соседних проводников другой обмотки, суммарная наведенная ЭДС в нем равна нулю согласно принципу электрической индукции. При смещении проводника от этого нейтрального положения ЭДС в нем будет отличной от нуля.
Если вместо одного проводника взять обмотку из нескольких проводников, то качественно результат не изменится. Таким образом, смещение одной плоской обмотки относительно другой приведет к изменению фазы наведенной ЭДС в выходной обмотке, смещению в один шаг будет соответствовать изменение фазы выходного сигнала от 0 до 360°. Тем самым индуктосин представляет собой синусно-косинусный трансформатор.
Точность индуктосина определяется шагом витков его обмотки t и точностью выполнения витков.
В известных конструкциях индуктосинов точность измерения составляет 1 мкм в диапазоне до 1000 мм.
Описанные принципы построения индуктивных преобразователей линейных перемещений используются и при создании преобразователей угловых перемещений.
Наиболее высокими метрологическими характеристиками среди устройств этого типа обладает поворотный индуктосин. Этот преобразователь содержит два диска из изоляционного материала, расположенные соосно и параллельно (рис. 5). Диски могут поворачиваться относительно друг друга на измеряемый угол. На смежные поверхности дисков печатным способом наносятся обмотки, представляющие собой ряд радиальных токопроводящих пластин проводников. Обмотки могут быть непрерывными или разбитыми на секции, соединенные соответствующим образом. Наибольшее распространение получил вариант устройства, у которого ротор состоит из одной непрерывной обмотки, а статор — из двух секционированных обмоток. Угловое расстояние между началами (концами) соседних радиальных проводников называют полюсным делением обмотки, а удвоенное значение полюсного, целения — шагом обмотки. Обмотки статора сдвинуты относительно друг друга на половину полюсного деления обмотки ротора. Число радиальных проводников ротора должно быть четным, чтобы направление магнитных полей в двух соседних проводниках, на которых заканчивается обмотка, было противоположным, и чтобы обмотка была симметричной.
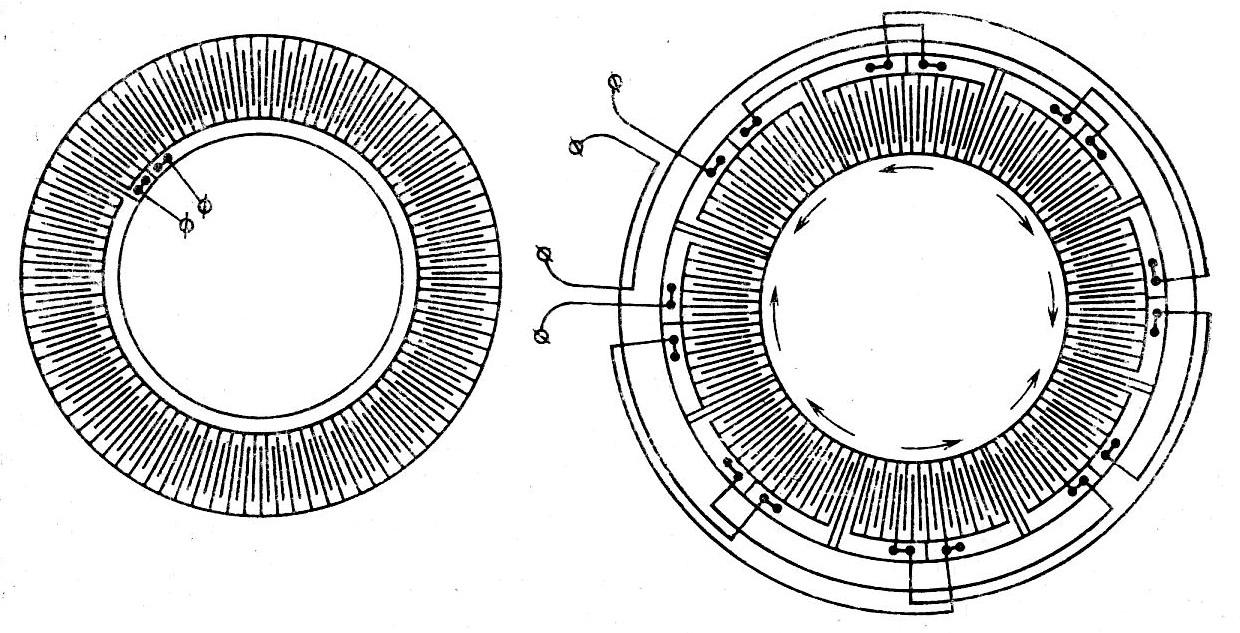
Рис.5
Если индуктосин предназначен для использования в системе, где измеряемая величина представляется в двоичной системе счисления, то удобны конструкции прибора, содержащие 128 или 256 пар полюсов; при десятичной системе число пар полюсов должно равняться 100 или 200, а для градусного отсчета — 180 или
360.
При питании обмоток статора переменным током (известны также варианты построения измерительных схем с индуктосинами, в которых питание осуществляется со стороны ротора) обычно частотой 10 кГц в роторе индуктосина индуцируется ЭДС, амплитуда и фаза которой являются функциями угла поворота ротора относительно статора. При различных способах питания обмоток статора можно получить зависимость фазы напряжения от угла поворота ротора при неизменной амплитуде, или наоборот, изменение амплитуды при постоянной фазе выходного напряжения. Наибольшее распространение в системах измерений угловых перемещений получил первый способ питания. Соответствующий ему режим работы индуктосина называется фазовым.
На рис. 6 показано изменение фазы выходного напряжения индуктосина. Видно, что фазовая характеристика индуктосина имеет многозначность и при измерении углов, больших 360°/р (где р — число пар полюсов), возникает необходимость в ступени грубого отсчета.
Ступень точного отсчета устройства для измерения угловых перемещений работает следующим образом. Ротор индуктосина укрепляют на валу, угол поворота которого необходимо измерить. Напряжение питания от генератора через фазосдвигающую цепочку и усилители статора подается со сдвигом 90° на статорные обмотки индуктосина, тем самым создается вращающееся электромагнитное поле. При повороте ротора изменение фазы напряжения на его зажимах через усилитель подается на вход формирователя. Он вырабатывает импульсы в момент перехода напряжения через нуль от минуса к плюсу. Аналогичные импульсы вырабатывает формирователь, на который напряжение подается от генератора. Импульс, сформированный напряжением генератора, отпирает непрерывно работающий генератор счетных импульсов, которые поступают в счетчик, а импульс, сформированный напряжением от усилителя, запирает генератор. Таким образом, в устройстве происходит цепочка преобразований: угловое смещение вала — фазовый сдвиг —.временный интервал — последовательность счетных импульсов.

Рис.6
Зафиксированное счетчиком число счетных импульсов в дальнейшем может быть преобразовано в двоичный или десятичный код и использовано для управления или индикации.
Погрешность измерения угловых перемещений с помощью поворотных индуктосинов составляет несколько угловых секунд.
Оптические меры
Оптические многозначные меры, применяемые в фотоэлектрических измерительных устройствах, представляют собой измерительные и индикаторные растровые решетки (амплитудные), измерительные дифракционные решетки, штриховые и волновые (шкалы длин волн) меры, ультразвуковые шкалы!
Измерительный растр представляет собой совокупность элементов, расположенных определенным образом на некоторой, несущей поверхности и воздействующих на световой поток как единое целое. Пропускающие растры представляют собой ..систему прозрачных и непрозрачных элементов; в отражающих растрах, элементы зеркально отражают свет. Т.е.и другие изменяют, амплитуду падающей волны излучения « называются амплитудными; растровыми решетками. Растры, действие которых на падающую волну сводится в основном к изменению фазовых соотношений, называются фазовыми растровыми решетками.
Амплитудные растровые решетки
Растр может быть параллельным: полные штрихи нанесены параллельно на поверхность прозрачного материала. Обычно применяют растры, у которых ширина штриха составляет половину шага. Растр с прямоугольными элементами получают путем совмещения двух параллельных растров со взаимно перпендикулярными штрихами. Для измерения угловых величин применяют радиальные растры. Шаг следования штрихов измеряется в угловых единицах. Иногда радиальные растры характеризуются частотой, показывающей, сколько штрихов укладывается в окружности. В центральном радиальном растре непрозрачные элементы расходятся в виде лучей из одного центра, но могут являться касательными к некоторой окружности малого радиуса (рис.7). В кольцевом растре непрозрачные элементы выполнены в виде концентрических колец. В некоторых растровых преобразователях находит применение спиральный растр, непрозрачные штрихи которого нанесены по спирали Архимеда.

Рис.7
В
фотоэлектрических измерительных
устройствах используют две растровые
решетки: измерительную и индикаторную.
Индикаторный растр аналогичен
измерительному, но размер его значительно
меньше, а шаг q
равен шагу измерительного растра или
несколько отличен от него. Если наложить
индикаторный растр на измерительный
так, чтобы между ними был зазор и элементы
индикаторного растра располагались
под некоторым углом
![]() к линиям измерительного растра, то
темные штрихи одного из них, накладываясь
на светлые штрихи другого, уменьшают
площадь этих светлых участков растра;
в местах же пересечения темных полос
они накладываются друг на друга,
совмещаясь, и тем самым сохраняют
площадь светлых полос растра на этом
участке без изменения. Возникающие
светлые и темные участки образуют
широкие полосы, которые называют
комбинационными или муаровыми. Шаг
этих полосG>q
(рис.
8). Поэтому при перемещении индикаторного
растра относительно измерительного на
шаг G
комбинационные
полосы переместятся на шаг G.
Последний можно определить:
к линиям измерительного растра, то
темные штрихи одного из них, накладываясь
на светлые штрихи другого, уменьшают
площадь этих светлых участков растра;
в местах же пересечения темных полос
они накладываются друг на друга,
совмещаясь, и тем самым сохраняют
площадь светлых полос растра на этом
участке без изменения. Возникающие
светлые и темные участки образуют
широкие полосы, которые называют
комбинационными или муаровыми. Шаг
этих полосG>q
(рис.
8). Поэтому при перемещении индикаторного
растра относительно измерительного на
шаг G
комбинационные
полосы переместятся на шаг G.
Последний можно определить:
|
|
|

или, если q1=q2=q,
|
|
|
 .
.

Рис.8
Заметим также, что при перемещении индикаторного растра вправо комбинационные полосы перемещаются сверху вниз, а при перемещении влево — в обратном направлении.
Для
измерения перемещений на растровое
поле необходимо положить непрозрачную
диафрагму со щелями, шаг которых равен
шагу комбинированного растра. При
движении муаровой картины относительно
этих щелей световой поток на площади
щелей будет изменяться. При относительном
перемещении растров на шаг ^
возникает
световой импульс, который несет информацию
об измеряемом перемещении. Для определения
направления этого перемещения
диафрагмы-щели располагают так, чтобы
получить сдвиг пространственных фаз
сигнала на выходе растрового сопряжения.
Если на одном шаге комбинационного
растра расположены четыре щели,
сдвинутые на 1/4
G
относительно друг друга,
то
это соответствует сдвигу фазы сигнала
на величину, пропорциональную
![]() .
.
Световые импульсы от растрового сопряжения преобразуются с помощью фотоприемников в импульсы фототока, которые суммируются счетчиком при прямом перемещении комбинационных .полос и вычитаются при их обратном перемещении.
Если
![]() ,
то
,
то![]() ,
поэтому
при наложении растровых решеток
можно получить растр, который называют
иониусным (рис. 9, а). Полосы нониусного
растра перемещаются в направлении
стрелки N
при перемещении первого растра
относительно второго в том же направлении
и в обратном направлении при перемещении
второго растра относительно первого.
Шаг нониусных полос комбинационного
растра
,
поэтому
при наложении растровых решеток
можно получить растр, который называют
иониусным (рис. 9, а). Полосы нониусного
растра перемещаются в направлении
стрелки N
при перемещении первого растра
относительно второго в том же направлении
и в обратном направлении при перемещении
второго растра относительно первого.
Шаг нониусных полос комбинационного
растра
|
|
|
где
![]() .
.
Для получения сдвига пространственных фаз применяют решетки со сдвигом растровых элементов (рис. 9, б). При сопряжении такого растра с другим, не имеющим сдвига штрихов, образуется комбинационный растр со сдвигом полос. На рис. 9(в) показан комбинационный растр со сдвигом на G/2.

Рис.9
Для измерения угловых перемещений используют сопряжения радиальных и спиральных растров. В зависимости от взаимного расположения решеток, углового шага и направления штрихов возникает несколько типов комбинационных полос. Сопряжение двух радиальных растров с равными угловыми шагами дает сеточный тип комбинационных полос (рис.10, а). Сопряжение двух радиальных растров, имеющих разные угловые шаги, с совмещением их центров дает нониусную комбинационную картину (рис.10,б). Сопряжение радиально-нецентрального растра с радиально-центральным или радиально-нецентральным растром при совмещении центров обоих растров даёт муаровую картину с кольцевыми комбинационными полосами (рис.10,в).

Рис.10
Нониусное сопряжение характеризуется линейной зависимостью углового перемещения комбинационных полос от угла поворота одного из растров, а в муаровом сопряжении линейное перемещение комбинационной полосы прямо пропорционально углу поворота подвижного растра.
Измерительные дифракционные решетки (фазовые растры)
Измерительные дифракционные решетки отличает очень малый шаг, сравнимый с длиной волны света.

Рис.11
На
рис.11 изображена в разрезе дифракционная
пропускающая решетка. У световой
волны, проходящей через выступы решетки,
имеет место больший сдвиг фаз
![]() по
сравнению с волной, проходящей через
впадины. Сдвиг фаз определяется
показателем преломления n
материала
решетки и высотой выступов d.
Длина
волны света в материале решетки
по
сравнению с волной, проходящей через
впадины. Сдвиг фаз определяется
показателем преломления n
материала
решетки и высотой выступов d.
Длина
волны света в материале решетки
![]() ,
где
,
где
![]() — длина волны света в пустоте;
следовательно, сдвиг фаз световых
волн, проходящих через решетку,
— длина волны света в пустоте;
следовательно, сдвиг фаз световых
волн, проходящих через решетку,![]() .
.
При
![]() …..
монохроматический свет проходит через
решетку, а при
…..
монохроматический свет проходит через
решетку, а при![]() ;
;![]() ;
;![]() …
- не проходит.
В
результате интерференции световых
пучков разных порядков за дифракционным
сопряжением образуются полосы с
синусоидальным изменением освещенности.
…
- не проходит.
В
результате интерференции световых
пучков разных порядков за дифракционным
сопряжением образуются полосы с
синусоидальным изменением освещенности.
Дифракционное сопряжение состоит из двух решеток: измерительной и индикаторной, которые могут иметь также пилообразный и треугольный профиль.
Достоинство дифракционных решеток заключается в возможности получить большее число штрихов на единицу длины (до 600 и более). Это позволяет строить измерительные устройства с малой ценой деления, равной десятым долям микрометра. Недостаток — трудность изготовления решеток большой длины (300 мм и более). Поэтому для создания измерительных устройств с высокой разрешающей способностью в настоящее время предпочитают применять растровые интерполяторы.
Штриховые меры
Эти меры представляют собой металлическую или стеклянную линейку, на которую с определенным шагом нанесен ряд параллельных штрихов. Таким образом, штриховая мера является частным случаем растровой решетки. Однако шаг этой меры значительно превышает шаг растров (он, как правило, равен 1 мм), а толщина штрихов — значительно меньше шага. Штриховые меры, выполненные на стеклянной линейке, работают в проходящем свете, а выполненные на металлической линейке — в отраженном.
Если стеклянную штриховую меру осветить источником излучения, помещенным по одну сторону от нее, а по другую сторону поместить параллельно мере щелевую диафрагму, то при относительном перемещении меры и щели штрих затенит последнюю и ее освещенность уменьшится. Соответственно уменьшится и ток фотоприемника, помещенного за щелью.
При дальнейшем перемещении меры или диафрагмы освещенность щели остается постоянной вплоть до тех пор, пока штрих •снова не затенит щель. Таким образом, в отличие от растрового сопряжения штриховая мера в некоторых положениях не дает информации о перемещении. Меру используют в грубых ступенях измерительных систем, для измерения перемещений путем подсчета числа штрихов, прошедших под щелевой диафрагмой. Последняя — в том или ином виде — входит в состав фотоэлектрического микроскопа, выполняя роль индикаторного элемента.
Штриховые меры получили особо широкое распространение в измерительных устройствах станков с числовым программным управлением (ЧПУ).
Волновые меры
Эти меры, или шкалы длин волн (излучения), применяют в интерферометрах. Процесс измерения линейного перемещения интерферометрическим методом заключается в определении числа длин волн (или долей длин волн) излучения, укладывающихся на измеряемом отрезке. Волновые меры описаны ниже при рассмотрении лазерных измерителей линейных перемещений.
Ультразвуковые шкалы
Метод создания оптических мер на основе распространения ультразвука разработан канд. техн. наук Телешевским В. И. в Московском станкоинструментальном институте.
Метод основан на том, что оптическое изображение акустических волн, распространяющихся в прозрачных средах, представляет собой периодическое пространственно-временное распределение интенсивности света. Такое распределение можно рассматривать как оптический растр, возникающий в результате взаимодействия света с ультразвуковыми волнами, и использовать как волновой аналог механических растров.
В основе механизма образования ультразвуковых шкал лежит явление дифракции света на ультразвуковых волнах. Ультразвуковая волна, распространяющаяся в оптически прозрачной среде, создает в ней периодическое распределение показателя оптического преломления, что действует на проходящий световой поток подобно фазовой дифракционной решетке. Дифракция света на акустической решетке и последующая интерференция дифрагированных световых волн приводят к образованию оптического растра.
Отличительной особенностью таких шкал, названных ультразвуковыми, является то, что они электрически воспроизводимы и электрически управляемы. Такие шкалы открывают ряд новых возможностей для электрической коррекции погрешностей, автоматической стабилизации и интерполяции цены деления, а также в адаптическом управлении процессами настройки и измерения.
Фотоэлектрические растровые измерительные устройства
В состав фотоэлектрического растрового измерительного устройства входит растровое преобразующее звено, состоящее: из подвижного измерительного и неподвижного индикаторного растров; блока подсветки растрового звена; блока фотоприемников, воспринимающего излучение, модулированного растровым звеном; электронного логического блока.
Растровое звено является масштабным преобразователем, так как небольшие перемещения измерительного растра преобразуются в существенно большие перемещения комбинационных полос. Простейшее растровое звено, работающее в проходящем свете, показано на рис. 12(а). Измерительный растр 2 закрепляют на подвижном органе объекта, а индикаторный растр 4, блок подсветки 1 и фотоприемника 3 — на неподвижных частях объекта. При перемещении измерительного растра 2 в направлениях, показанных стрелкой, периодически изменяется фототок в фотоприемнике из-за модуляции светового потока растровым звеном. Аналогичным образом работает звено с радиальными растрами, предназначенное для преобразования угловых перемещений (рис.12, б). Здесь измерительный растр 2 укрепляют на валу, угол поворота которого нужно преобразовать, остальные элементы системы закрепляют неподвижно.
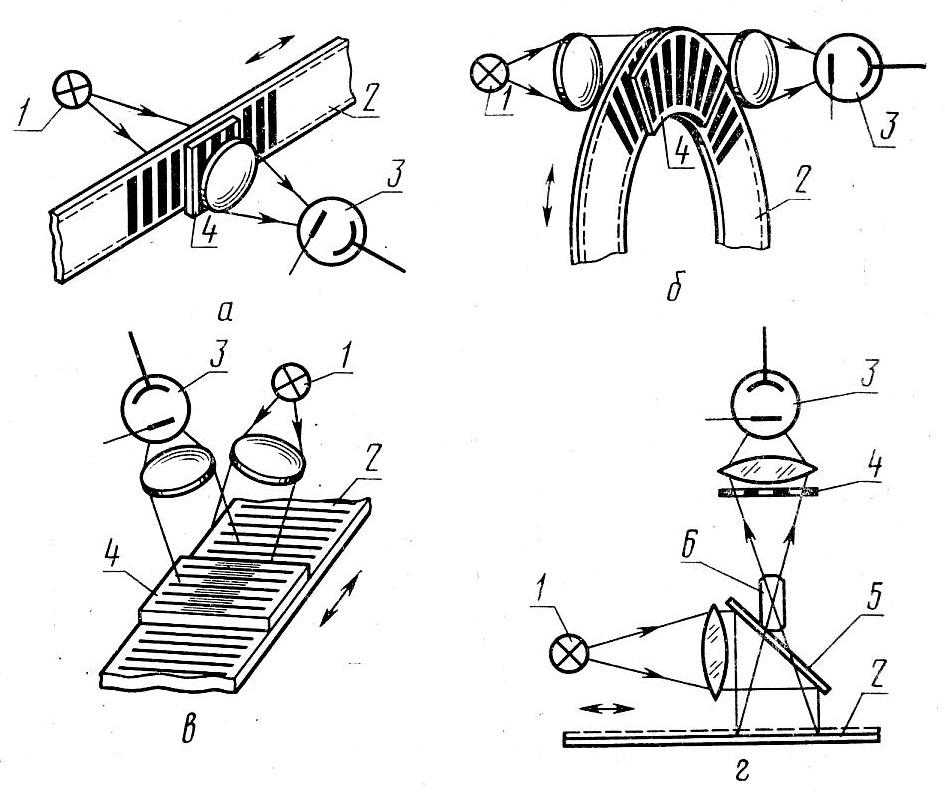
Рис.12
Кроме растровых звеньев, работающих в проходящем свете, используются звенья отражающими растрами. В одном из вариантов такого звена (рис.12, в) параллельный пучок света от блока подсветки 1 проходит через индикаторный растр 4 на измерительный растр 2 и попадает на фотоприемник 3.
Оси падающего и отраженного модулированного потоков света находятся в плоскости, нормальной к плоскости измерительного растра и параллельной штрихам индикаторного растра.
В другом варианте (рис.12, г) измерительный растр 2 освещается параллельным потоком света, сформированным блоком подсветки 1 и полупрозрачным зеркалом 5. Изображение растрат с помощью объектива 6 проецируется в плоскость индикаторного растра 4. При перемещении измерительного растра 2 в направлении, показанном стрелкой, его изображение перемещается в плоскости растра 4, в результате чего и образуются комбинационные полосы.
Существует
большое число разновидностей растровых
измерительных систем. Простейшим из
них является накапливающая система
с растровым звеном (см. рис.12, а). В
практических реализациях таких
систем используют, как правило, несколько
фотоприемников (обычно четыре). Перед
фотоприемниками так располагают
прямоугольные диафрагмы, что на каждый
фотоприемник поступает световой
поток, сдвинутый по пространственной
фазе на
![]() относительно предыдущего фотоприемника
(рис.13).
относительно предыдущего фотоприемника
(рис.13).
Фотоприемники включают по балансной схеме, т. е. объединяют ФП1 с ФПЗ и ФП2 с ФП4. Это позволяет компенсировать колебания в уровне постоянной составляющей сигнала, обусловленные изменением тока накала лампы подсветки, старением фотоприемников и т. д.
Подбором
параметров растрового звена и диафрагм
можно добиться практически
синусоидальной формы сигналов, снимаемых
с каждой пары фотоприемников. При
перемещении измерительного растра
в одном направлении изменение первого
сигнала U1,
создаваемого
фотоприемниками ФП1
и
ФПЗ,
отстает
на четверть периода (т. е. на
![]() )
от изменения второго сигналаU2
, поступающего от фотоприемников ФП2
и
ФП4.
При
перемещении же в противоположном
направлении второй сигнал отстает от
первого на тот же фазовый угол
)
от изменения второго сигналаU2
, поступающего от фотоприемников ФП2
и
ФП4.
При
перемещении же в противоположном
направлении второй сигнал отстает от
первого на тот же фазовый угол
![]() .
Поэтому знак фазового сдвига между
этими сигналами характеризует направление
измеряемого перемещения. Если преобразовать
синусоидальные сигналы в прямоугольные
импульсы, то измеряемое перемещение
будет представлено последовательностью
таких импульсов, каждый из которых
соответствует перемещению на шаг растраq.
Число
импульсов подсчитывается электронным
реверсивным счетчиком.
.
Поэтому знак фазового сдвига между
этими сигналами характеризует направление
измеряемого перемещения. Если преобразовать
синусоидальные сигналы в прямоугольные
импульсы, то измеряемое перемещение
будет представлено последовательностью
таких импульсов, каждый из которых
соответствует перемещению на шаг растраq.
Число
импульсов подсчитывается электронным
реверсивным счетчиком.
С помощью таких простейших накапливающих систем удается достичь разрешающей способности в несколько микрометров, если в качестве сопрягаемых растров использовать дифракционные решетки. Для большего повышения разрешающей способности накапливающих систем идут не по пути использования дифракционных решеток с более мелким шагом (что по ряду причин является затруднительным), а по пути дробления шага растров на 4—20 частей. На рис.13 представлены блок-схема и диаграммы работы электронного блока при формировании четырех импульсов на каждую муаровую полосу.
Синусоидальные
сигналы U1
и
U2,
сдвинутые
на
![]() ,
поступают на входы формирователейФ1
и
Ф2.
С
одного выхода формирователя снимается
прямоугольное напряжение с той же
фазой, что и входной синусоидальный
сигнал, а с другого — прямоугольное
напряжение, по фазе сдвинутое на
,
поступают на входы формирователейФ1
и
Ф2.
С
одного выхода формирователя снимается
прямоугольное напряжение с той же
фазой, что и входной синусоидальный
сигнал, а с другого — прямоугольное
напряжение, по фазе сдвинутое на
![]() относительно первого. Поэтому на
выходах формирователей образуются
четыре прямоугольных напряженияА;
В;
относительно первого. Поэтому на
выходах формирователей образуются
четыре прямоугольных напряженияА;
В;
![]() и
и
![]() ,
причем
три из них сдвинуты относительно
предыдущего на
,
причем
три из них сдвинуты относительно
предыдущего на
![]() по фазе. Эти импульсы поступают на схемы,
которые управляют работой реверсивного
счетчикаРС.
Для
формирования импульсов сложения служат
четыре схемы совпадения И1—И4,
с
выхода которых импульсы поступают на
схему ИЛИ1.
Для
формирования импульсов вычитания
используются логические схемы И5—И8
и
ИЛИ2.
На
импульсные входы поступают импульсы
а;
b;
по фазе. Эти импульсы поступают на схемы,
которые управляют работой реверсивного
счетчикаРС.
Для
формирования импульсов сложения служат
четыре схемы совпадения И1—И4,
с
выхода которых импульсы поступают на
схему ИЛИ1.
Для
формирования импульсов вычитания
используются логические схемы И5—И8
и
ИЛИ2.
На
импульсные входы поступают импульсы
а;
b;
![]() и
и
![]() ,
полученные
дифференцированием положительных
фонтов прямоугольных напряжений
дифференцирующими цепочками Д1—Д8.
Из
рис.13(в), видно, что при движении
измерительной растровой решетки в
направлении +х
на
реверсивный счетчик РС
поступают
сигналы сложения
,
полученные
дифференцированием положительных
фонтов прямоугольных напряжений
дифференцирующими цепочками Д1—Д8.
Из
рис.13(в), видно, что при движении
измерительной растровой решетки в
направлении +х
на
реверсивный счетчик РС
поступают
сигналы сложения
|
|
|
а при движении в обратном направлении – сигналы вычитания
|
|
|
При этом при перемещении измерительной решетки на один шаг на счетчик подаются четыре импульса, т. е. разрешающая способность измерительной системы составляет 1/4 шага. Некоторое усложнение электронного блока позволяет повысить разрешающую способность до 1/3 шага или до 1-2 мкм.
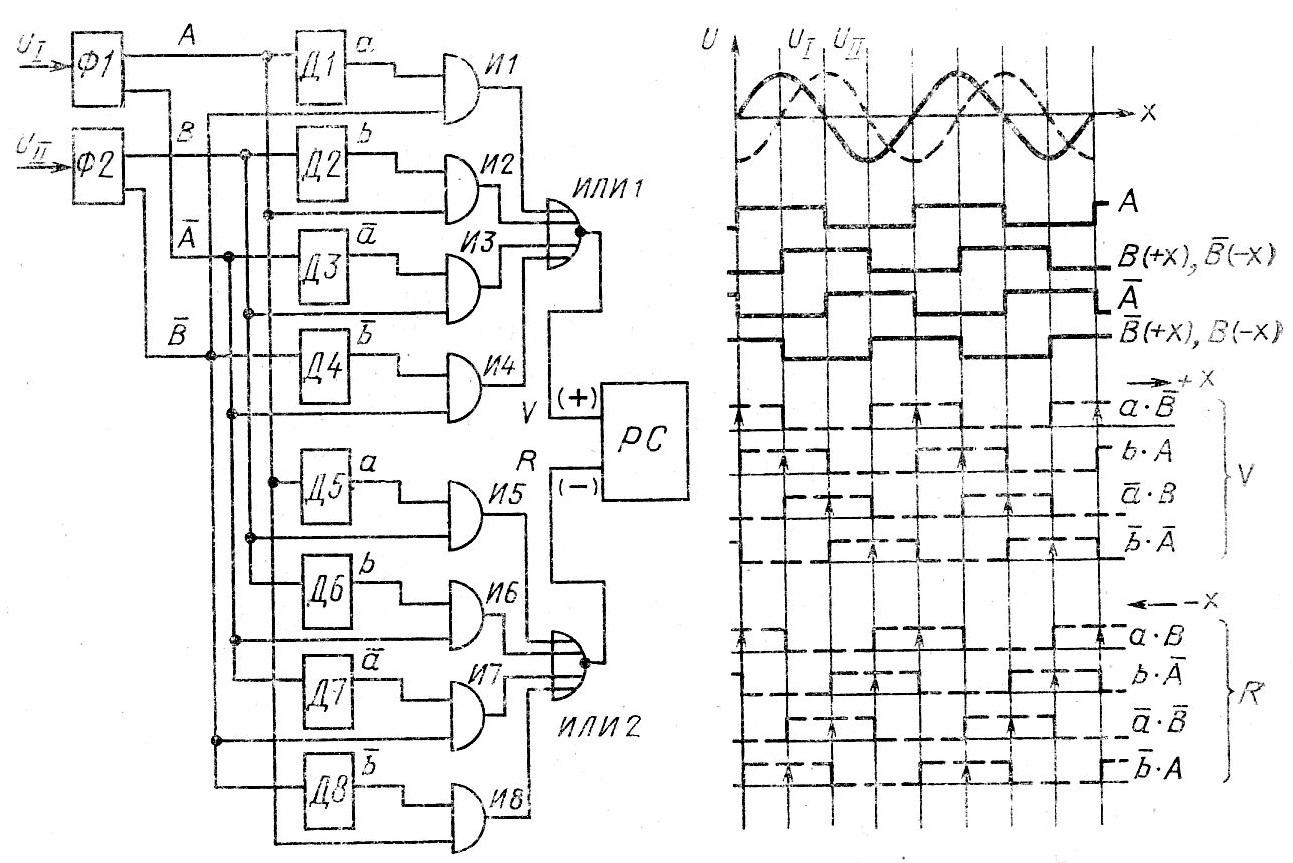
Рис.13
Более сложными в конструктивном отношении являются растровые интерполяторы, которые определяют относительное положение 'индикаторного элемента либо по пространственной фазе муаровой картины, либо по положению экстремумов в распределении освещенности за растровым сопряжением. Соответственно различают фазовые и экстремальные растровые интерполяторы. Наибольшее распространение получили интерполяторы первого типа. Рассмотрим в качестве примера принцип действия фазовых растровых интерполяторов с механической модуляцией потока излучения.
Эти устройства (рис.14) содержат три решетки: измерительную растровую решетку 1, перемещение которой измеряют (ее крепят к подвижному органу станка или устройства), неподвижную опорную растровую решетку 3, предназначенную для образования опорного сигнала, и индикаторную растровую решетку 2, непрерывно вращающуюся с постоянной скоростью. Для случаев преобразования линейных перемещений измерительная и опорная решетки представляют собой параллельные растры (рис.14, а, б) с радиальным или круговым расположением полос. Индикаторную решетку выполняют в виде радиального растра (рис.14, а, в) или многовитковой (многозаходной) спирали Архимеда (рис.14, б).

Рис.14
Шаг решеток 1 и 3 должен быть равен линейному шагу решетки 2 на соответствующем радиусе.
Индикаторная решетка образует два семейства муаровых полос: одно с измерительной решеткой, а другое с опорной растровой решеткой. Поскольку индикаторная решетка вращается с постоянной скоростью, прозрачность муаровой картины на пути от источника света до фотоприемника периодически изменяется. Фотоприемник опорного канала ФП0 и фотоприемник измерительного канала ФПИ фиксируют непрерывно движущиеся муаровые полосы. Электронные схемы (на рисунке не показаны), в которые включают фотоприемники ФП0 и ФПИ , вырабатывают импульсы, соответствующие переходу синусоидальных напряжений, снимаемых с фотоприемников, через нуль. Фаза этих импульсов в опорном канале постоянна, а в измерительном зависит от положения измерительной решетки. Перемещение этой решетки на один шаг растра соответствует изменению разности фаз между импульсами опорного и измерительного каналов на 360°, а знак фазового изменения указывает направление движения. Импульсы обоих каналов поступают на фазовый дискриминатор, выходное напряжение которого либо подается на стрелочный прибор, либо преобразуется в цифровой код.
Частота модуляции потока излучения в измерительном канале :при перемещении измерительной решетки с линейной скоростью определяется выражением
|
|
1.7 |
где t
—
линейный шаг измерительного растра
(знак перед вторым слагаемым зависит
от направления движения измерительной
решетки); N
— число просветов между штрихами
индикаторной решетки;
![]() — частота вращения индикаторной решетки,
об/с.
— частота вращения индикаторной решетки,
об/с.
Из
выражения (1.7) следует, что с увеличением
N
и
![]() повышается частота модуляции потока
излучения. Однако создать систему с
высокой частотой модуляции светового
потока и, следовательно, с высоким
разрешением не всегда удается из-за
инерционности фотоприемников. Обычно
разрешающая способность измерительных
систем с механической модуляцией потока
составляет несколько долей микрометров.
повышается частота модуляции потока
излучения. Однако создать систему с
высокой частотой модуляции светового
потока и, следовательно, с высоким
разрешением не всегда удается из-за
инерционности фотоприемников. Обычно
разрешающая способность измерительных
систем с механической модуляцией потока
составляет несколько долей микрометров.
Фотоэлектрические измерительные устройства со штриховыми мерами
Эти устройства содержат линейку со штрихами в качестве многозначной меры, ФЭМ как индикаторный элемент, электронный счетно-логический блок и в ряде случаев — устройства для интерполяции внутришагового интервала, равного обычно 1,0 мм. Ниже рассмотрены лишь устройства точной ступени измерительной схемы — фотоэлектрические интерполяторы.
Интерполятор (рис.15), используемый совместно с времяимпульсным микроскопом, трансформирует синусоидальную шкалу микроскопа в линейную, иначе говоря, линеаризует зависимость выходного тока электронной схемы от положения штриха.
Лампа 13 с конденсором 14 освещает щель 15, изображение которой объектив 12 передаете плоскость светочувствительной поверхности фотоэлемента 11. Пучок света, отразившись от двух зеркал 17, проходит через шесть плоскопараллельных пластин. Пластина 10, колеблющаяся с той же частотой, что и зеркало в фотоэлектрическом микроскопе, служит для развертки изображения щели относительно фотоэлемента примерно по синусоидальному закону, а также для предварительной установки на нуль всего устройства. Измерительная пластина 8 устанавливается на зубчатом секторе 18. Сектор может поворачиваться червяком в пределах ±15° относительно нулевого положения, при котором измерительная пластина 8 перпендикулярна к оптической оси механизма. При нулевом положении пластины 8 на выходе фотоэлемента возникает последовательность равноотстоящих колоколообразных импульсов. Если сектор поворачивается, временные интервалы между этими импульсами изменяются. Импульсы фототока преобразуются триггером Шмитта в последовательность прямоугольных сигналов, которые сравниваются с аналогичными сигналами фотоэлектрического микроскопа. При несовпадении фаз двух серий импульсов возникает сигнал ошибки, который усиливается и подается на управляющую обмотку двухфазного двигателя, вращающего червяк 19.

Рис.15
Таким образом, в рассматриваемом фотоэлектрическом механизме осуществлена астатическая система автоматического регулирования. Положение штриха измеряется углом поворота зубчатого сектора 18, причем смещению 0,1 мкм соответствует угол поворота, равный 10". Считывание показаний осуществляется тремя поворотными цилиндрами 4—6, связанными между собой передаточным отношением 1 : 10. Перед цилиндрами расположен экран с тремя прорезями, параллельными образующим цилиндров. В качестве отсчетных индексов используются винтовые линии, нанесенные на боковые поверхности цилиндров и занимающие при повороте червяка определенную позицию в прорезях.
Так как в микроскопе сканирование осуществляется сканатором 7, выполненным в виде колеблющегося зеркала, то возникает погрешность, связанная с различием в законах преломления и отражения света. Для ее устранения имеются корригирующие пластины 1-3, которые поворачиваются кулачком на нужный угол. Пластина 9 служит для установки механизма на нуль. Коррекцию осуществляют кулачком 16. Интерполятор позволяет измерять положение штриха меры в пределах 1 мм с погрешностью ±0,2 мкм.
На порядок грубее, но вполне приемлемую для практики точность обеспечивает фотоэлектрическое устройство, показанное на рис.16(а), где 1, 16 — объективы; 2, 6, 7, 13 — фотоприемники; 3, 5 — щелевые диафрагмы; 4 — линза; 8 — светоделительная призма; 9,17 — отражающие зеркала; 10 —конденсор; 11 — лампа накаливания; 12, 14 — полупрозрачные зеркала; 15 — вращающийся диск; 18 — плоскопараллельная пластина; 19 — штриховая мера.

Рис.16(а)
Динамический фотометрический микроскоп этого устройства состоит из объектива, вращающейся плоскопараллельной пластины, .наклоненной относительно оптической оси устройства, светоделительной призмы и двух фотоприемников. Развертка штриховой меры осуществляется по круговой траектории, радиус которой несколько больше интервала меры.

Рис.16(б)
Генератор заполняющих (счетных) импульсов включает в себя вращающийся прозрачный диск, на который нанесены темные штрихи, объектив, два зеркала (отражающее и полупрозрачное) и фотоприемник. Диск укреплен на той же оси, что и сканирующая пластина. При равномерном вращении этого узла с фотоприемника снимается частотно-модулированная (по синусоидальному закону) последовательность импульсов, образованных при пересечении пучка лучей и темных штрихов на диске.
Генератор стартовых импульсов содержит конденсор, отражающее зеркало, две неподвижные щели, фотоприемник и линзу, установленную на вращающемся диске. Импульс фототока снимается с фотоприемника в момент прохождения центра этой линзы через ось симметрии неподвижных щелей.
График, иллюстрирующий работу интерполятора, дан на рис.16(б). Стартовый импульс запускает счетчик, на вход которого поступают частотно-модулированные заполняющие импульсы. Счет их заканчивается в момент совпадения базовой линии микроскопа с фотометрическим центром ближайшего штриха. Так как линейная составляющая сканирующего движения вдоль оси х изменяется по синусоидальному закону, то содержимое счетчика оказывается прямо пропорциональным текущему положению этого штриха относительно начала отсчета (стартового импульса).
Лазерные измерители линейных перемещений
Интерференционный измеритель линейных перемещений представляет собой сложный комплекс, включающий помимо источника излучения оптическое устройство (интерферометр), формирующее сигнал измерительной информации, и электронное устройство обработки и индикации результатов измерений.
Наиболее распространенным видом оптического устройства является интерферометр Майкельсона и его различные модификации. Процесс формирования сигнала измерительной информации в нем осуществляется следующим образом. Излучение источника 1 (рис.17) делится полупрозрачной пластиной 2 на два пучка, каждый из которых направляется к соответствующему отражателю 3 и 4. Возвратившись к полупрозрачной пластине, оба пучка совмещаются на ней, образуя поле интерференции. На экране, помещенном в эту часть оптической схемы, возникает интерференционная картина – чередование темных и светлых полос в пределах сечения совмещенных световых пучков.
Если
источник излучает электромагнитные
колебания строго определенной частоты
![]() , то результирующая интенсивность в
любой точке интерференционной картины
, то результирующая интенсивность в
любой точке интерференционной картины
|
|
1.8 |
 ,
,где Iизм и Iоп – интенсивность в точке наблюдения интерференции соответственно измерительного и опорного световых пучков;LизмиLоп– геометрическая длина измерительного и опорного плеч интерферометра;nв – показатель преломления окружающей среды (воздуха);с0 – скорость света в вакууме.
Из
выражения (1.8) следует, что Iрез
определяется не только интенсивностями,
но и разностью фаз интерферирующих
пучков в точке наблюдения (аргументом
при косинусе). Период измерения
результирующей интенсивности, как
следует из (1.8),
соответствует
изменению геометрической разности хода
![]() на
на
|
|
|
где
![]() ;
;![]() –
длина
волны источника излучения в вакууме и
в воздухе соответственно.
–
длина
волны источника излучения в вакууме и
в воздухе соответственно.
При равенстве значений интенсивности интерферирующих пучков (Iизм=Iоп=I) возможны два характерных случая:
интерферирующие пучки синфазны (Iрез =I+I+2I= 41);
интерферирующие пучки в противофазе (Iрез=I+I –2I=0).
Таким образом, интенсивность излучения, прошедшего сквозь точечную диафрагму 5 на фотоприемник 6, при перемещении одного из отражателей будет изменяться по закону, качественно иллюстрированному эпюрой (рис.17, б). Фотоприемником 6 интерференционный сигнал преобразуется из светового в электрический, который поступает далее на электронно-вычислительное устройство обработки и индикации результатов измерения 7.
Электромагнитные
колебания, излучаемые любым реальным
источником, характеризуются определенной
ширины спектром частот. Для удобства
рассмотрения такое излучение можно
представить как результат периодического
изменения средней частоты излучения
![]() с
некоторой девиацией
с
некоторой девиацией
![]() .
Наличие такой девиации в общем случае
(при
.
Наличие такой девиации в общем случае
(при![]() ) приводит к изменениям разности фаз
между интерферирующими пучками, а
следовательно, и к флуктуациям
результирующей интенсивности, не
обусловленным изменением контролируемого
параметра. Вследствие инерционности
фотоприемников эти хаотические флуктуации
усредняются и воспринимаются как
снижение доли переменной составляющей,
несущей в интерференционном сигнале
информацию об изменении контролируемого
параметра.
) приводит к изменениям разности фаз
между интерферирующими пучками, а
следовательно, и к флуктуациям
результирующей интенсивности, не
обусловленным изменением контролируемого
параметра. Вследствие инерционности
фотоприемников эти хаотические флуктуации
усредняются и воспринимаются как
снижение доли переменной составляющей,
несущей в интерференционном сигнале
информацию об изменении контролируемого
параметра.
В соответствии с выражением (1.8) влияние уширения спектра излучения пропорционально разности хода интерферирующих пучков. Даже при использовании наиболее монохроматических обычных источников оптического излучения интерференция может быть зарегистрирована только при разности хода не более нескольких десятков сантиметров. Ограничение диапазона измеряемых перемещений и низкая спектральная интенсивность обычных источников излучения оптического диапазона сдерживали широкое внедрение интерференционного метода в практику технических измерений.
Положение изменилось после изобретения и освоения промышленностью оптических квантовых генераторов света (ОКГ)—лазеров, создающих путем вынужденного излучения монохроматические узконаправленные пучки лучей света большой мощности. Слово «лазер» — это аббревиатура выражения «Light amplification by stimulated emission of radiation» — «усиление света с помощью вынужденного излучения». Усиление света в лазере используется затем для генерирования света, для чего к усилителю присоединяют зеркала.
Рассмотрим примеры конкретных реализаций метода лазерной интерферометрии для измерения перемещений.
Особенностью
оптической схемы лазерного интерферометра
(рис.18) является использование
четырехкратного прохождения светового
пучка в измерительном плече. Световой
пучок от гелий-неонового лазера 1
(![]() = 0,6328 мкм) направляется в коллиматор2,
уменьшающий
его угловую расходимость. Часть светового
пучка с помощью расщепителя 4
направляется
на преобразователь 3
для
подстройки частоты. Этот же расщепитель
совместно с окуляром 5 используется при
совмещении светового пучка, выходящего
из интерферометра, с линией перемещения
отражателя 8.
С
помощью полупрозрачной пластины 7
световой поток делится на два пучка.
Опорное плечо интерферометра
ограничивается зеркалом 6.
Световой
пучок в измерительном плече с помощью
подвижного отражателя 8
возвращается
в интерферометр, где попадает на зеркало
9.
Отраженный
от зеркала 9
световой
пучок
попадает на подвижный
отражатель
и далее на полупрозрачную пластину
7,
где
он совмещается с опорным пучком. Таким
образом, измерительный пучок четыре
раза проходит расстояние между
интерферометром и подвижным отражателем,
что обеспечивает двукратное увеличение
разрешающей способности по сравнению
со схемой, изображенной на рис.17.
= 0,6328 мкм) направляется в коллиматор2,
уменьшающий
его угловую расходимость. Часть светового
пучка с помощью расщепителя 4
направляется
на преобразователь 3
для
подстройки частоты. Этот же расщепитель
совместно с окуляром 5 используется при
совмещении светового пучка, выходящего
из интерферометра, с линией перемещения
отражателя 8.
С
помощью полупрозрачной пластины 7
световой поток делится на два пучка.
Опорное плечо интерферометра
ограничивается зеркалом 6.
Световой
пучок в измерительном плече с помощью
подвижного отражателя 8
возвращается
в интерферометр, где попадает на зеркало
9.
Отраженный
от зеркала 9
световой
пучок
попадает на подвижный
отражатель
и далее на полупрозрачную пластину
7,
где
он совмещается с опорным пучком. Таким
образом, измерительный пучок четыре
раза проходит расстояние между
интерферометром и подвижным отражателем,
что обеспечивает двукратное увеличение
разрешающей способности по сравнению
со схемой, изображенной на рис.17.

Рис.18
Подвижным отражателем служит трехгранная уголковая призма. Важными свойствами такой призмы являются сохранение параллельности отраженного, светового пучка падающему, а также постоянство длины пути, проходимого излучением в самой призме при ее угловых разворотах относительно оси падающего светового пучка. Это обстоятельство особенно важно при технических измерениях, когда имеет место остаточная непрямолинейность направляющих.
Фотоприемники
10,
11, помещенные
в поле интерференции, формируют два
электрических сигнала с взаимным фазовым
сдвигом
![]() ,
что
необходимо для обеспечения реверсивного
отсчета. Период каждого из этих
сигналов соответствует перемещению
отражателя на
,
что
необходимо для обеспечения реверсивного
отсчета. Период каждого из этих
сигналов соответствует перемещению
отражателя на
![]() = 0,158 мкм.
= 0,158 мкм.
Блок-схема устройства обработки и индикации результатов измерения представлена на рис.19.

Рис.19
Электрические сигналы с каждого из фотоприемников 1, 2 подаются на соответствующие формирователи 3, 4, представляющие собой пороговые устройства с двумя уровнями срабатывания, расположенными симметрично относительно уровня постоянной составляющей сигнала с выхода фотоприемника. Логическое устройство 5 разделяет выходные импульсы формирователей по двум каналам, каждый из которых соответствует определенному направлению перемещения отражателя. Реверсивный счетчик 6 алгебраически суммирует поступающие на его вход импульсы. Для приведения результатов измерения к метрической (или английской) системе единиц используется устройство умножения 7, на которое подаются также сигналы с преобразователей давления 12 и температуры 11 окружающего воздуха. Сигналы с преобразователей предназначены для автоматической коррекции коэффициента умножения при отклонении окружающих условий от нормальных. Выход устройства умножения через другое логическое устройство 8 связан с визуальным девятиразрядным индикатором результатов измерения 9. Наряду с визуальной индикацией предусмотрен вывод информации о результатах измерения на вспомогательное цифро-печатающее устройство 10.
В рассмотренном интерферометре применен принцип обработки сигналов измерительной информации путем суммирования количества пришедших импульсов с последующим перемножением суммы на значение цены каждого импульса в принятой системе единиц, что обеспечивает минимальную погрешность, вносимую при цифровой обработке результатов измерения.
В более поздних моделях лазерных измерителей линейных перемещений широкое распространение получило совмещение функции суммирования и умножения введением итерационного алгоритма умножения, что позволило значительно уменьшить габаритные размеры электронной части лазерного интерферометра.
В качестве источника излучения в таком интерферометре использован одночастотный гелий-неоновый лазер (рис.20).

Рис.20
Световой
пучок от гелий-неонового лазера 1
через
коллиматор 2
и
диафрагму 3
направляется
на полупрозрачную светоделительную
пластину 8.
Опорное
плечо интерферометра ограничивается
трехгранной уголковой призмой 7.
Подвижный отражатель 9
в
измерительном плече выполнен в виде
аналогичной уголковой призмы. Ширина
полос интерференционной картины
обусловливается оптическим клином 6,
вносящим
определенное угловое расхождение
между интерферирующими пучками. С
помощью светоделительной призмы 12
суммарный
световой пучок направляется на два
фотоэлектронных умножителя 10,
14. Для
преобразования бегущей интерференционной
картины в световой поток переменной
интенсивности перед каждым из
фотоприемников установлены точечные
диафрагмы 11,
13, диаметры
отверстий которых значительно меньше
ширины интерференционной полосы. Фазовый
сдвиг на
![]() между выходными сигналами фотоэлектронных
умножителей достигается взаимным
сдвигом отверстий диафрагмы11,
13 относительно
соответствующих точек интерференционных
картин на 1/4 ширины интерференционной
полосы.
между выходными сигналами фотоэлектронных
умножителей достигается взаимным
сдвигом отверстий диафрагмы11,
13 относительно
соответствующих точек интерференционных
картин на 1/4 ширины интерференционной
полосы.
Применение в оптической схеме двух уголковых призм обеспечивает параллельность интерферирующих световых пучков и тем самым исключает необходимость точной угловой юстировки элементов оптической схемы. Через поворотное зеркало 4 лучи поступают на экран 5.

Рис.21
Электрические
сигналы, поступающие на вход устройства
обработки и индикации результатов
измерения (рис.21) при перемещении
подвижного отражателя, иллюстрированы
эпюрами на рис.22(а и б).
Период
этих сигналов соответствует перемещению
подвижного отражателя на
![]() =0,3164
мкм .
Каждый из входных сигналов поступает
на соответствующий формирователь 1
или
2
(см.
рис.21) — пороговое устройство с двумя
уровнями обрабатывания (штриховые
прямые линии на эпюрах а
и
б), выставленными симметрично
относительно постоянной составляющей
входного сигнала. В этом случае сигналы
на выходе формирователей (эпюры в
и г)
—
это две последовательности прямоугольных
импульсов со скважностью 2 и взаимным
фазовым сдвигом на
=0,3164
мкм .
Каждый из входных сигналов поступает
на соответствующий формирователь 1
или
2
(см.
рис.21) — пороговое устройство с двумя
уровнями обрабатывания (штриховые
прямые линии на эпюрах а
и
б), выставленными симметрично
относительно постоянной составляющей
входного сигнала. В этом случае сигналы
на выходе формирователей (эпюры в
и г)
—
это две последовательности прямоугольных
импульсов со скважностью 2 и взаимным
фазовым сдвигом на
![]() .
В учетверителе3
формируется
сигнал направления перемещения, а также
калиброванные по амплитуде и длительности
импульсы (эпюра д),
соответствующие
каждому перепаду выходных уровней
обоих формирователей. Таким образом,
«метрическая цена» каждого импульса,
сформированного в учетверителе,
.
В учетверителе3
формируется
сигнал направления перемещения, а также
калиброванные по амплитуде и длительности
импульсы (эпюра д),
соответствующие
каждому перепаду выходных уровней
обоих формирователей. Таким образом,
«метрическая цена» каждого импульса,
сформированного в учетверителе,
![]() = 0,0791 1мкм. Сущность дальнейшего
преобразования сигнала измерительной
информации сводится к следующему:
каждому импульсу с истинной ценой
= 0,0791 1мкм. Сущность дальнейшего
преобразования сигнала измерительной
информации сводится к следующему:
каждому импульсу с истинной ценой![]() формально приписывается ближайшее
к ней значение, кратное выбранной
единице длины (в данном случае 0,1 мкм
вместо 0,0791 мкм). Погрешность, нарастающая
при перемещении отражателя вследствие
различия истинной и приписанной цены
каждого импульса, компенсируется тем,
что из суммируемого потока импульсов
исключается по одному импульсу в тот
момент, когда погрешность приближается
к предельно допустимому значению.
Порядок исключения импульсов
подчиняется определенному алгоритму.
формально приписывается ближайшее
к ней значение, кратное выбранной
единице длины (в данном случае 0,1 мкм
вместо 0,0791 мкм). Погрешность, нарастающая
при перемещении отражателя вследствие
различия истинной и приписанной цены
каждого импульса, компенсируется тем,
что из суммируемого потока импульсов
исключается по одному импульсу в тот
момент, когда погрешность приближается
к предельно допустимому значению.
Порядок исключения импульсов
подчиняется определенному алгоритму.
Можно показать, что длительность каждой ступени итерации ск , определяется из выражения
|
|
|
 ,
,
где k
– номер
итерации; h–
шаг
квантования, равный 0,07910248 мкм;
![]() –
цена
деления, равная 0,1 мкм; c0=1.
–
цена
деления, равная 0,1 мкм; c0=1.
Из
этого выражения значения интервалов
первых трех ступеней итерации
получают равными c1
= +3; с2
= –19;
с3=
+1234. Знак «+» перед коэффициентами с1
и
c3
означает, что из суммируемой
последовательности импульсов заключаются
каждые 4-й и 1235-й импульсы, а знак «—»
соответствует восстановлению каждого
19-го импульса в серии импульсов после
первой степени. Максимальное значение
погрешности вычисления в этом случае
определяется выражением
![]() и не превышает
0,2
мкм при перемещении до 4,8 м.
и не превышает
0,2
мкм при перемещении до 4,8 м.
Коррекцию результатов измерения при отклонении окружающих условий от нормальных и поправку на температурное расширение измеряемого объекта осуществляют путем изменения интервала третьей ступени.
В соответствии с рассмотренным принципом преобразования сигнала измерительной информации каждые три импульса о выходе учетверителя 3 (см. рис.21) через вентили 4 – 6 поступают на основной счетчик 7. Каждый четвертый импульс блокируется вентилем 4. Так реализуется первая ступень итерации. Первый вспомогательный счетчик 10 в момент поступления на его вход 19-го импульса выдает команду на вентиль 4 для восстановления четвертого импульса в шестом цикле первой ступени и возвращается в исходное состояние, завершая цикл второй ступени. Выходные импульсы первого вспомогательного счетчика (каждый 19-й из последовательности импульсов первой ступени) через вентиль 11 поступает на второй вспомогательный счетчик 12. В момент поступления на этот счетчик 66-го импульса вентиль 6 блокирует импульс, соответствующий интервалу третьей ступени. Указанные операции повторяются до момента прекращения перемещения.
Третий вспомогательный счетчик 14 служит для полуавтоматического ввода поправок на отклонение окружающих условий от нормальных. В этот счетчик с помощью двух наборных табло 15, 16 оператор вводит определенное для данных температуры и давления окружающей среды число Х(t, р), табулированное в диапазоне температур 9—35°С и давлений 94—101 кПа. На третий вспомогательный счетчик 14 поступают также импульсы со счетчика 10, соответствующие каждому циклу второй ступени итерации. В момент совпадения числа импульсов, поступающих со счетчика 10, с введенным значением X (t, р) третий вспомогательный счетчик 14 с помощью вентиля 11 блокирует или вводит (в зависимости от знака X) дополнительный импульс в последовательность импульсов, поступающих на второй вспомогательный счетчик 12.
Дополнительное наборное табло 13 служит для ввода поправки на отклонение температуры измеряемого объекта от нормальной путем изменения коэффициента пересчета второго вспомогательного счетчика на целое число единиц .Такое изменение на одну единицу обусловливает изменение результата измерения в относительных единицах на 1,25-10-5, что примерно соответствует относительному температурному расширению стали при перепаде температуры на 1°C .
Цифровой индикатор результатов измерения 8 содержит восемь десятичных разрядов и при цене младшего разряда 0,1 мкм позволяет регистрировать перемещение в диапазоне до 10 м.
Итерационный метод с некоторыми усовершенствованиями использован в системах обработки результатов измерения первого отечественного лазерного интерферометра и разработанного на его основе промышленного измерителя линейных перемещений типа ИПЛ-7.
Метрологические характеристики ИПЛ-7: максимальное измеряемое перемещение 1 м; максимальная скорость перемещения призменного устройства 1,7 м/мин; погрешность измерения, не более ±(0,2 + 0,5L) мкм, где L — перемещение, выраженное в метрах; цена младшего разряда цифрового индикатора 0,1 мкм.
Общим недостатком описанных выше лазерных интерферометров является их чувствительность к изменению уровней сигналов .фотоприемников (см. эпюры а и б на рис.22), вызываемому, например, нестабильностью мощности излучения лазеров, дрейфом чувствительности фотоприемников, поперечным смещением подвижного отражателя. Вследствие гальванической связи фотоприемников с формирователями изменения уровней сигналов приводит к смещению их постоянных составляющих относительно уровней срабатывания формирователем. При этом скважности выходных сигналов формирователей (эпюры виг) отклоняются от оптимального значения 2, что нарушает равномерность распределения выходных импульсов учетверителей (см. эпюру д) в пределах каждого периода интерференционного сигнала. В связи с этим взаимное наложение выходных импульсов учетверителя, ограничивающее скорость измеряемого перемещения, наступает при меньшем значении этой скорости, чем в случае оптимальной настройки. Дальнейшее изменение уровней сигналов приводит к потере работоспособности интерферометра.
Существует несколько способов снижения чувствительности лазерного интерферометра к изменению уровней сигналов. Наиболее перспективный из них основан на использовании лазера, излучающего одновременно на двух частотах. При этом схема интерферометра строится таким образом, что информация о контролируемом перемещении оказывается сосредоточенной в разности частот (или фаз) переменных сигналов, вырабатываемых двумя фотоприемниками интерферометра. Поэтому изменение амплитуд этих сигналов не влияет на точность измерения. Однако интерферометр с двухчастотным лазером сложнее в конструктивном отношении, вследствие чего он пока получил (меньшее распространение.
Фотоэлектрические измерительные устройства с ультразвуковыми шкалами
В основу таких устройств положено несколько методов.
Первый
метод основан на бегущих ультразвуковых
волнах. Источник света, например,
лампа накаливания 1
(рис.23),
посредством щелевой диафрагмы 2
и
коллиматорной линзы 3
создает
поток параллельных лучей, пересекающий
бегущие ультразвуковые волны в
звукопроводах 11
и 4.
Волны
направлены встречно и возбуждаются от
электронного генератора 9
на
частоте
![]() пьезоэлектрическими
преобразователями 10
и
5.
Линза 8
формирует
оптическое изображение волн в
плоскости 7
в виде оптического растра. Поглотители
6
и
12,
установленные
на концах звукопроводов
11
и
4,
обеспечивают
распространение в них часто бегущих
ультразвуковых волн.
пьезоэлектрическими
преобразователями 10
и
5.
Линза 8
формирует
оптическое изображение волн в
плоскости 7
в виде оптического растра. Поглотители
6
и
12,
установленные
на концах звукопроводов
11
и
4,
обеспечивают
распространение в них часто бегущих
ультразвуковых волн.
Отсчет перемещений осуществляется следующим образом. С контролируемым подвижным объектом связывается звукопровод 11, длина которого соответствует диапазону измерения (в дальнейшем звукопровод назовем шкалой). Относительно шкалы неподвижно устанавливают оптическую систему и звукопровод 4, называемый в дальнейшем модулятором. Оптический растр, образуемый в плоскости наблюдения 7, характеризуется распределением освещенности, близким к синусоидальности:
|
|
1.9 |
где
I0
— постоянная; I1
— амплитуда переменной составляющей
освещенности в изображении; с
— скорость
ультразвука в среде
шкалы
11
и модулятора 4;
![]() -оптическое
увеличение
(F—фокусное
расстояние линзы 8);
х1
, х2
—
начальные положения плоскостей
пьезоизлучателей 10
и
5
шкалы
и модулятора соответственно;
-оптическое
увеличение
(F—фокусное
расстояние линзы 8);
х1
, х2
—
начальные положения плоскостей
пьезоизлучателей 10
и
5
шкалы
и модулятора соответственно;
![]() и
и![]() —
начальные фазы возбуждаемых в шкале и
модуляторе ультразвуковых колебаний.
—
начальные фазы возбуждаемых в шкале и
модуляторе ультразвуковых колебаний.
Из
выражения (1.9) следует, что перемещение
шкалы 11
относительно
оптической системы и модулятора 4
приводит
к смещению полос в плоскости изображения
7. При перемещении шкалы
11
на
интервал
![]() фаза изображения
фаза изображения
![]() изменяется
на
изменяется
на
![]() ,
и система полос смещается на один период.
Таким образом, цена деленияg
ультразвуковой шкалы зависит от частоты
f
электронного генератора. Изменяя
частоту f,
можно электрически управлять масштабом
шкалы. Положение полос в плоскости 7
зависит также от соотношения фаз
,
и система полос смещается на один период.
Таким образом, цена деленияg
ультразвуковой шкалы зависит от частоты
f
электронного генератора. Изменяя
частоту f,
можно электрически управлять масштабом
шкалы. Положение полос в плоскости 7
зависит также от соотношения фаз
![]() и
и![]() возбуждаемых ультразвуковых колебаний.
Изменяя это соотношение посредством
фазовращателя в одном из электрических
каналов, можно управлять начальным
положением изображения в плоскости7.
возбуждаемых ультразвуковых колебаний.
Изменяя это соотношение посредством
фазовращателя в одном из электрических
каналов, можно управлять начальным
положением изображения в плоскости7.
Регистрация положения оптического растра в плоскости 7 осуществляется методом, изложенным в 1.4.
Второй метод предполагает пространственное совмещение встречно бегущих ультразвуковых волн в одном звукопроводе. Это соответствует случаю ультразвуковой волны со стоячей волной, причем функцию одного из излучателей выполняет поглотитель 6. В этой схеме модулятор отсутствует, а остальные элементы имеют назначение, аналогичное схеме на рис. 23.

Рис.23
В этом случае изображение оптического растра в плоскости наблюдения описывается выражением
|
|
1.10 |
где х
—
начальное положение плоскости
пьезоизлучателя 10
шкалы
11;
L
—
расстояние между излучателем 10
и
поглотителем 6.
Смещению
полос в изображении на один период, т.
е. цене деления шкалы 11,
соответствует
ее перемещение относительно оптической
шкалы на интервал
![]() .
.
Третий метод (рис.24) основан на двойном прохождении света через бегущую ультразвуковую волну-
Ультразвуковая волна в шкале 11 возбуждается излучателем 5 от электронного генератора 4 и поглощается поглотителем 8. Световой поток, создаваемый источником 1 с диафрагмой 2 и выходящий из объектива 3 , дважды пересекает шкалу 11 в противоположных направлениях, что достигается зеркалами (или призмами) 6 и 7. Так как скорость света в 105 раз больше скорости звука в шкале, схема по своему действию эквивалентна рассмотренным выше и формирует с помощью объектива 9 в плоскости 10 неподвижное растровое изображение, аналогичное полученным первым и вторым методам.
Ультразвуковые
шкалы на стоячих волнах ограничены в
управлении полуволновым условием
![]() ,гдеп=
1,
2, 3,… целое число. В шкалах этого типа
осуществимо только дискретное частотное
управление масштабом посредством
перехода с одной резонансной частоты
звукопровода на другую.
,гдеп=
1,
2, 3,… целое число. В шкалах этого типа
осуществимо только дискретное частотное
управление масштабом посредством
перехода с одной резонансной частоты
звукопровода на другую.
Шкалы на бегущих волнах не имеют этих ограничений, что позволяет применять к ним любые виды управления в пределах полосы пропускания. Управляемость может быть использована для автоматической стабилизации цены деления.
Одна
из возможных схем стабилизации основана
на оптико-электронной фазовой
автоподстройке частоты (ФАПЧ) электронного
генератора частоты 4.
Изменение
цены деления под действием
дестабилизирующих факторов (температуры,
ухода частоты и др.) приводит к смещению
изображения в плоскости 10.
Фотоэлектрический
микроскоп регистрирует это смещение и
воздействует через преобразующее
устройство на частоту генератора 4
таким
образом, чтобы сохранялось условие
![]()
![]() ,
гдеп
—
постоянное число.
,
гдеп
—
постоянное число.

Рис.23
Разработанная в Московском станкоинструментальном институте ультразвуковая шкала с указанной системой автоматической стабилизации с параметрами f=4 МГц; с=1600 м/с; L= 1000 мм позволяет выполнять измерения с накопленной погрешностью не более ± 1 мкм на длине 1 м.
Цена деления ультразвуковых шкал составляет от десятых до сотых долей миллиметра в зависимости от среды звукопровода (жидкостной или твердой) и типа возбуждаемых колебаний (объемных и поверхностных).
Достижимая длина составляет несколько метров при потребляемой электрической мощности 1-1,5 Вт. Использование схемы на бегущей волне, аналогичной изображенной на рис.23, но без модулятора, позволяет создавать чисто фазовые шкалы, не имеющие аналога при механическом делении.
Наибольшее применение многозначные меры находят в измерительных устройствах станков с числовым программным управлением. Эти устройства, как правило, используют индуктивные меры (проходные зубчатые преобразователи, преобразователи типа «винт – гайка» и т. д.) или оптические (растровые сопряжения и штриховые меры).
Более универсальным является лазерный измеритель перемещений, принцип действия которого основан на использовании волновых мер. В последние годы он находит самое широкое применение для решения различных измерительных задач.