

Гирометры
Гирометры — это приборы, устанавливаемые на движущихся объектах для определения их угловой скорости.
В зависимости от природы используемого физического явления различают:
а) механические гирометры, основанные на свойствах гироскопа;
б) оптические гирометры на лазерах или волоконной оптике, использующие свойства распространения волн.
Гироскопический измеритель скорости
Гироскоп состоит из ротора, смонтированного в кардановом подвесе, который, будучи раскрученным мотором до большой скорости (~104об/мин), вращается вокруг осиY'Y(рис.9.10).
Измеряемая скорость вращения wдолжна быть направлена по осиZ'Z, перпендикулярной осиY'Y; из-за этой скорости по является гироскопический момент силCrпропорциональныйCgи направленный по Х'Х перпендикулярно осям У’У иZ'Z; он стремится повернуть подвес гироскопа. Момент Сgуравновешивается моментом упругих сил Сг, создаваемым двумя пружинами; он пропорционален углу а поворота подвеса. В условиях равновесия имеем
Cr=Cg.
Отсюда получаем
α=ωH/k.
Угол а поворота подвеса гироскопа пропорционален измеряемой скорости; с помощью потенциометра угол а преобразуется в пропорциональный ему электрический сигнал.
Порядок величин метрологических характеристик типового-гироскопического измерителя скорости (докум. SFIM) следующий: диапазон измерений (Д. И.) от ±7°/с до ±360 °/с; чувствительность средняя от 57 Ом/7е до 1,11 Ом/°/с; отклонение от линейности <±1,5% от Д. И.; порог чувствительности <±1 от Д. И.; ошибка гистерезиса 0,5% от Д. И.; собственная резонансная частота заключена между 6 и 25 Гц.
Оптические гирометры
Принцип действия.
Когда световая волна распространяется в движущейся среде, преодолеваемое ею расстояние зависит от того, происходит распространение в направлении движения или в противоположном ему. Пусть, например, между двумя зеркалами, расположенными на расстоянии Lдруг от друга, распространяется световая волна. Если зеркала расположены неподвижно в неподвижной среде, то преодолеваемое волной расстояние от Мiдо М2:
di2=d2i=L.
Когда оба зеркала перемещаются как целое со скоростью V, направленной, например, отMiк М2, то:
а) путь d12увеличивается, потому что М2удаляется от фронта волны:di2=L(1-V/c).
Во вращающейся среде, образующей кольцевой резонатор лазера, две волны, распространяющиеся в противоположных направлениях, создают эффект разности их хода, проявляющийся в двух лазерных пучках различной частоты. Суперпозиция этих двух пучков порождает биение, частота ∆fкоторого пропорциональна скорости вращения: ∆f=4Aω/Lλ, где A — площадь, охватываемая кольцевым резонатором,L— его периметр, λ — средняя длина волн излучения. Такой прибор — лазерный гигрометр — позволяет измерять очень малые угловые скорости, порядка 10~2°/ч. В гирометре другого типа два пучка, выходящие из одного и того же лазера, распространяются в противоположных направлениях по оптическому волокну, вращающемуся с измеряемой скоростью. На выходе из волокна два пучка интерферируют; подсчет числа ∆Zсмещенных из-за вращения интерференционных полос позволяет измерить скорость: ∆Z=2Lrω/λc, гдеL— длина волокна, r—длина волны излучения лазера. Гигрометр этого типа на оптическом волокне, благодаря увеличениюLпри многовитковой намотке, позволяет измерять угловые скорости примерно в 100 раз меньшие, чем измеряемые обычным лазерным гигрометром.
В данной работе были рассмотрены и изучены: датчики на токах Фуко, гироскопические измерители скорости, оптические тахометры, датчики с переменным магнитным сопротивлением, тахометрические генераторы на переменном и постоянном токе. Синхронный генератор. Речь идет о небольшом генераторе переменного тока. Ротор, связанный с осью, скорость которой Статор несет якорную обмотку (одно- или многофазную), в которой возникает синусоидальная э.д.с; ев амплитуда и частота пропорциональны скорости вращения ротора. Могут использоваться на автомобилях в тяжелой промышленности, ветрянных и гидро-электростанциях.

2-коллектор; 3- статор; 4 - ротор; 5-проводники


Рис. 2. Различные типы тахометрическнх генераторов постоянного тока (документация фирмы С.Е.М.).

Рис. 3- Синхронный генератор
а — однофазный двухполюсный; б — трехфазный с 4 полюсами в соединением обмоток в звезду измеряется, представляет собой магнит или совокупность магнитов.
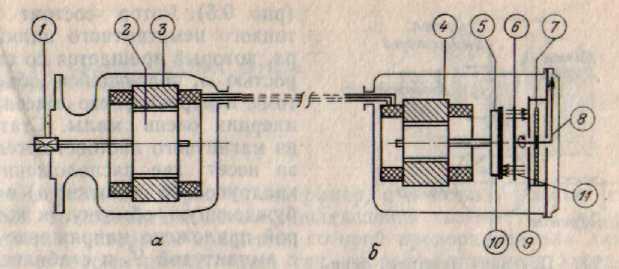
Рис. 4. Тахометр с синхронной электрической передачей (документация фирмы Jaeger).
а — задающий генератор переменного тока; б — индикатор. 1 — квадрат; 2 — постоянный магнит; 3 — статор; 4 — двигатель; 5 — измерительный магнит; 6 — измерительный диск; 7 — регулируемая спиральная пружина; 8— игла; 9 — экранирующая пластин; 10 — узел термокомпенсации; 11 —магнитное поле.

Рис.6. Принцип действия датчика
с подвижной катушкой.
I— катушка; 2 —постоянный магнит.

Рис.7. Датчик скорости с подвижным магнитом (документация фирмы Schaevitz).
а — конструкция; б — соединение измерительных катушек.

Рис.9.Принцип действия оптического тахометра.
J—линза; 2 — световой пучок; 3— оптическнй приемник.

Рис. 10. Конструкция гироскопа (документация фирмы SFIM).
1 — пружина; 2 — амортизатор; 3 —карданов подвес; 4 — курсор; 5 — ротор; 6 — потенциометр.

рис 11. Оптический гирометр.
Список используемой литературы:
1.Волосов С.С., Педь Е.И. Приборы для автоматического
Контроля в машиностроении. М., Машиностроение, 1970
2.Городецкий Ю.Г. Конструкции, расчет и эксплуатация измерительных инструментов и приборов. М., Машиностроение, 1971.
3. Сайт в Интернете http://www.mehanik.ru
Поворотный индуктосин.
Важная составная часть привода технологического оборудования с замкнутой системой управления – система обратной связи с измерительным преобразователем, определяющая действительное положение перемещаемых рабочих органов станка или промышленного робота.
Измерительным преобразователем называют средство измерения, предназначенное для преобразования линейных (или круговых) перемещений рабочего органа станка (или угла поворота ходового винта) в нормированный электрический сигнал, содержащий информацию о значении и направлении этих перемещений и передающий ее в устройство числового программного управления или в устройство цифровой индикации станка.
К основным характеристикам ИП относятся следующие: дискретность, то есть минимальное значение угла поворота или перемещения; диапазон измеряемых перемещений; максимальная скорость измерения; погрешность измерения.
По принципу действия ИП могут быть импульсными, фазовыми, кодовыми, фазоимпульсивными и др. По конструктивному исполнению различают круговые и линейные ИП. В качестве круговых ИП наиболее широкое применение в технологическом оборудовании нашли вращающиеся трансформаторы, резольверы, поворотные индуктосины, сельсины, кодовые и растровые фотоэлектрические ИП. В качестве линейных ИП применяют линейные индуктосины и ИП с различными циклическими масштабными линейками, линейные кодовые и растровые фотоэлектрические преобразователи.
Вращающиеся трансформаторы, резольверы, поворотные индуктосины, сельсины представляют собой индукционные микромашины переменного тока, у которых определенным образом включены статорные и роторные обмотки [2].
Устройство и принцип работы
Поворотный индуктосин представляет собой плоскую электрическую машину, основными элементами которой являются два изоляционных диска с нанесенными на них печатными обмотками; диски расположены на разных осях соосно и параллельно и могут поворачиваться относительно друг друга. Магнитопровода индуктосин не имеет. Обмотки машины представляют собой радиальные токопроводящие пластины, соединяемые по определенной схеме. Простейшей является обмотка, равномерно распределенная по внешней части диска и имеющая выводные концы для подвода тока или снятия ЭДС.
Двухфазная обмотка выполняется в виде нескольких секций, сдвинутых относительно друг друга на половину полюсного деления. Наибольшее распространение получил поворотный индуктосин, у которого статор (неподвижный диск) состоит из двух многополюсных секционированных фазных обмоток, а ротор – из одной многополюсной обмотки. Обмотки статора сдвинуты относительно друг друга на половину полюсного деления ротора. На рис.1 схематически показана конфигурация обмоток ротора и статора индуктосина. Для получения симметричных обмоток число печатных проводников на роторе и в секции статора должно быть четным. Число проводников в обмотках индуктосина зависти от числа пар полюсов, которые выбираются кратными 10; 2k (k = 1, 2, 3 ...) или 180 в зависимости от применения индуктосина. Синусоидальная зависимость взаимной индуктивности обмоток от угла поворота ротора достигается путем выбора определенного отношения ширины проводника к полюсному делению, скоса проводников и сокращения шага обмотки статора. Частота напряжения питания индуктосина находится обычно в пределах 10-100 кГц; при этом коэффициент передачи по напряжению составляет 0,005-0.01. Применение более высоких частот вызывает неравномерное распределение токов в проводниках и усиливает емкостные связи между обмотками, что приводит к снижению точности индуктосина. Обмотки индуктосина на указанных частотах имеют практически только активное сопротивление, которое составляет несколько Ом.

Рис. 1 – Конфигурация обмоток статора (а) и ротора (б)
индуктосина
Таким образом, поворотный индуктосин по своим электромагнитным связям эквивалентен вращающемуся трансформатору с сосредоточенными обмотками, имеющему одну обмотку на роторе и синусную и косинусную обмотки на статоре [1].
Режимы работы
При питании обмоток статора переменным током в роторе индуктосина индуцируется ЭДС, амплитуда и фаза которой являются функциями угла поворота ротора. В зависимости от способа питания обмоток статора различают два режима работы индуктосина.
При питании обмоток напряжениями, амплитуды которых изменяются соответственно по синусоидальному и косинусоидальному законам, а фазы совпадают, индуктосин работает в режиме пульсирующего поля, а измерение угла производится при нулевом напряжении на выходе машины. Этот режим работы индуктосина называется амплитудным, он аналогичен работе ВТ в режиме преобразователя координат и отличается от него наличием электромагнитной редукции.
При питании обмоток статора напряжениями равной амплитуды, но сдвинутыми по фазе относительно друг друга на 90°, индуктосин работает в режиме кругового вращающегося поля, а измерение угла сводится измерению фазы напряжения на однофазной обмотке индуктосина. При фазовом режиме работы индуктосин представляет собой многополюсный индукционный фазовращатель, отличающийся от обычного ВТ в режиме фазовращателя наличием электромагнитной редукции.

Рис. 2 – Структурная схема следящей системы с индуктосином
в фазовом режиме

Рис. 3 – Структурная схема следящей системы с индуктосином
в амплитудном режиме
В качестве примера использования указанных режимов рассмотрим индикаторную следящую систему. На рис.2 и 3 показаны структурные схемы следящей системы с индуктосином соответственно в фазовом и амплитудном режиме. При фазовом режиме (рис.2) работа системы происходит следующим образом. Напряжение генератора 1 через фазорасщепитель 2 и усилители 3и 4 подается с фазовым сдвигом 90° на статорные обмотки индуктосина 5. Напряжение c выхода индуктосина через усилитель 6 и фазовращатель 7 поступает на вход фазочувствительного выпрямителя 8, опорное напряжение которого задается генератором 1. Следящая система, состоящая из силового усилителя 9 и двигателя с редуктором 10, поворотом ротора фазовращателя 7 сводит к нулю появляющийся на выходе фазочувствительного выпрямителя сигнал рассогласования. При повороте индуктосина на угол α ротор фазовращателя повернется на угол pα, где p – число пар полюсов индуктосина. Если снабдить фазовращатель шкальным устройством, то можно произвести отсчет угла поворота ротора индуктосина с высокой точностью.
При амплитудном режиме (рис.3) работа системы существенно отлична. Как и раньше, питание схемы производится от генератора 1, напряжение которого подается на двухполюсный ВТ 2. Напряжения ВТ, пропорциональные косинусу и синусу угла поворота, подаются через усилители 3 и 4 (или без них) на обмотки статора индуктосина 5. Напряжение с ротора индуктосина через усилитель 6 подается на вход фазочувствительного выпрямителя 7, опорное напряжение которого задается генератором 1. Выходной сигнал с выпрямителя поступает на силовой усилитель 8 и далее на управляемый двигатель 9, который через механический редуктор поворачивает ротор ВТ до тех пор, пока сигнал рассогласования не станет равным нулю. Поворот ротора двухполюсного ВТ, как и при фазовом режиме, равен pα. Оба режима работы можно использовать также при разработке синхронных следящих систем с каналами грубого и точного отсчета (рис.4). В канале грубого отсчета применимы двухполюсные ВТ, а в канале точного отсчета – поворотные индуктосины с равным числом пар полюсов.
Индуктосины находят применение в прецизионных преобразователях код – угол и угол – код. При этом в первом преобразователе используется амплитудный режим работы, а во втором – фазовый [1].
 Рис.
4 – Принципиальная схема следящей
системы с каналами
Рис.
4 – Принципиальная схема следящей
системы с каналами
грубого и точного отсчёта
Уравнения ЭДС.
Схема электромагнитных связей обмоток индуктосина изображена на рис. 5. Этой схеме соответствует система уравнений

Рис. 5 – Электромагнитные связи в обмотках индуктосина
 .
(1)
.
(1)
Решая эту систему относительно тока ротора İ3 , получаем
İ3
= 1/∆ [![]() (jωM12
jωM23
- Z2
jωM13)
-
(jωM12
jωM23
- Z2
jωM13)
-
![]() (Z1
jωM23
- jωM12
jωM13)],
(2)
(Z1
jωM23
- jωM12
jωM13)],
(2)
где ∆ - определитель системы уравнений (1).
Для точной работы индуктосина в амплитудном и фазовом режимах необходимо выполнить следующие условия: равенство сопротивлений фаз статора (Z1 = Z2 = Z); равенство нулю взаимной индуктивности обмоток статора (M12 = 0); синусоидальная (косинусоидальная) зависимость взаимной индуктивности обмоток статора и ротора от угла поворота ротора (M13 = - М sin pα; M23 = - М cos pα). При этом из выражения (2), найдем:
для амплитудного режима работы
![]() =
=
![]() cos
ψ;
cos
ψ;
![]() =
=
![]() sin
ψ;
sin
ψ;
İ3
= jωM
![]() ∙sin
(pα
– ψ)/(ZZ3
+ ω2M2);
∙sin
(pα
– ψ)/(ZZ3
+ ω2M2);
(здесь ψ – преобразуемый в код угол);
для фазового режима работы
![]() =
=
![]() ;
;![]() =j
=j![]() ;
;
İ3
= jωM
![]() ∙ejpα/(ZZ3
+ ω2M2).
∙ejpα/(ZZ3
+ ω2M2).
Погрешности в работе индуктосина вызываются следующими основными причинами: неравенством амплитуд взаимной индуктивности обмоток статора; неточностью фазовых сдвигов питающих напряжений; электромагнитной и емкостной связью между обмотками статора; высшими гармониками во взаимной индуктивности обмоток статора и ротора.
Погрешности каждой из этих причин могут быть проанализированы с помощью выражения (2) [1].
С помощью поворотного индуктосина можно получить весьма высокое разрешение. Например, типовой поворотный индуктосин может содержать гребенку из 360 зубцов на один оборот и можно использовать 12-разрядный РЦП. Конвертер делит каждый шаг гребенки на 4096 секторов. Умножая их на 360 зубцов, можно сказать, что поворотный индуктосин делит окружность, как целое, на 1.474.560 секторов. Это соответствует угловому разрешению менее чем 0.9 угл. сек. Должны быть обеспечены средства для подсчета количества отдельных зубцов по ходу вращения оси. Это может выполняться с помощью дополнительного СКВТ, выполняющего грубые измерения.
Список использованной литературы
Хрущев В.В. Электрические машины систем автоматики: Учебник для вузов. – 2-изд., перераб. и доп. – Л.: Энергоатомиздат. Ленингр. отд-ние, 1985.- С. 270 -274.
Компанейц А.Н., Приезжаев А.Б. Информационное обеспечение технологических автоматов: Учеб пособие.- Омск: Изд. ОмПИ, 1988.- С. 3 - 4.