

ТакТильные чувствительные элементы
Тактильные датчики — это специальный класс преобразователей силы или давления, которые характеризуются небольшой толщиной. Эти датчики полезны в случаях, когда сила или давление измеряются между двумя поверхностями, расположенными близко друг к другу. Такие датчики часто используются в робототехнике, например, их устанавливают на «пальцы» механических приводов для обеспечения обратной связи при контакте с объектом - это напоминает то, как работают тактильные сенсоры кожи человека. Датчики касания используются в сенсорных дисплеях, клавиатурах и других устройствах, где необходимо реагировать на физическое прикосновение. Тактильные датчики широко применяются в биомедицине, для определения прикуса зубов и правильности установки коронок в стоматологической практике, а также при исследовании давления на ноги человека при ходьбе. Иногда при проведении операций протезирования их устанавливают в искусственные суставы для корректировки положения и т.д. В строительстве и на механических производствах тактильные датчики используются для определения сил, действующих на закрепленные устройства.
Рис. 2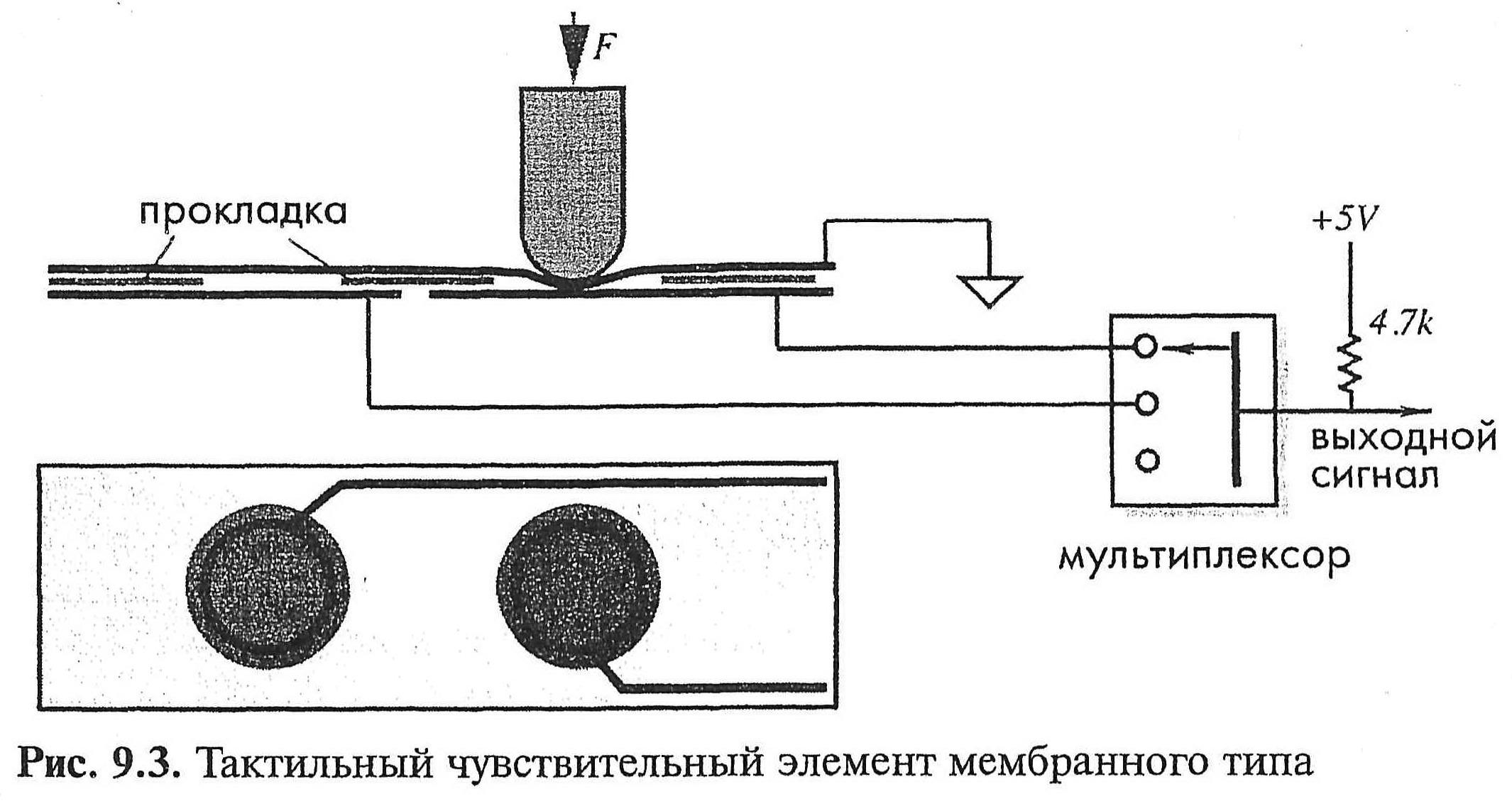
Для изготовления тактильных чувствительных элементов используются несколько методов. В некоторых из них на поверхности объекта формируется специальный тонкий слой из материала, чувствительного к механическим напряжениям. На рис. 2 показан простой тактильный датчик, обеспечивающий функции включения-выключения, состоящий из двух листов фольги и прокладки. Внутри прокладки сделаны круглые (или любой другой необходимой формы) отверстия. Один из листов фольги заземлен, а второй подсоединен к нагрузочному резистору. Если требуется контролировать несколько чувствительных зон, используется мультиплексор. Когда к верхнему проводнику прикладывается внешняя сила над отверстием в прокладке, он прогибается и соприкасается с нижним проводником, тем самым устанавливая с ним электрический контакт, заземляющий нагрузочный резистор. При этом выходной сигнал становится равным нулю, что свидетельствует о приложенной силе. Верхний и нижний проводники могут изготавливаться методом трафаретной печати проводящими чернилами на подложке из таких материалов, как Mylar® или полипропилен. Чувствительные зоны таких датчиков определяются рядами и колонками проводников, нанесенных чернилами. Прикосновение к определенному участку чувствительной поверхности приводит к замыканию соответствующих ряда и колонки, что показывает локализацию приложенной силы.
Х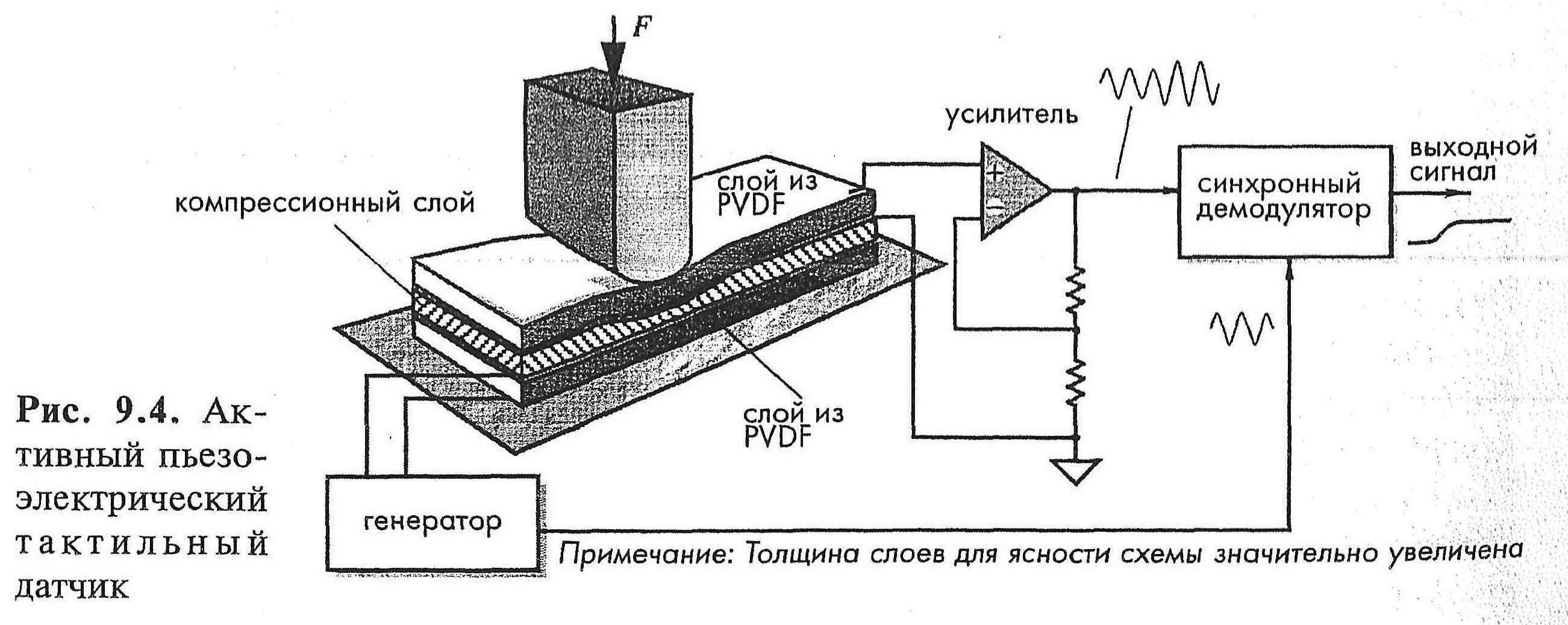 орошие
тактильные датчики получаются на основе
пьезоэлектрических пленок,
например, из поливинилиден фторида
(PVDF),
которые используются как в пассивном,
так и в активном режимах. На рис. 3 показан
активный ультразвуковой пьезоэлектрический
тактильный датчик, состоящий из трех
слоев пленок, соединенных
вместе (в датчике существуют еще
дополнительные защитные слои, не
показанные
на рисунке). Верхний и нижний слои
изготовлены из PVDF
пленок, а центральный
слой обеспечивает акустическую связь
между крайними слоями. Механические
характеристики центральной пленки
определяют чувствительность и рабочий
диапазон датчика. На нижний пьезоэлектрический
слой подается переменное
напряжение от генератора. Эти колебания
заставляют периодически сжиматься
и пленку из PVDF,
и промежуточный компрессионный слой,
и верхнюю пленку
из PVDF,
играющую роль приемника. Поскольку
пьезоэлектричество является
обратимым явлением, с верхней пленки
снимается переменное напряжение, которое
усиливается и выпрямляется на синхронном
демодуляторе, реагирующем как
на амплитуду, так и на фазу поступающего
сигнала. Когда к верхнему слою
прикладывается
внешняя сила F,
механические характеристики трехслойной
структуры
изменяются, что отражается на фазе и
амплитуде выходного сигнала.
орошие
тактильные датчики получаются на основе
пьезоэлектрических пленок,
например, из поливинилиден фторида
(PVDF),
которые используются как в пассивном,
так и в активном режимах. На рис. 3 показан
активный ультразвуковой пьезоэлектрический
тактильный датчик, состоящий из трех
слоев пленок, соединенных
вместе (в датчике существуют еще
дополнительные защитные слои, не
показанные
на рисунке). Верхний и нижний слои
изготовлены из PVDF
пленок, а центральный
слой обеспечивает акустическую связь
между крайними слоями. Механические
характеристики центральной пленки
определяют чувствительность и рабочий
диапазон датчика. На нижний пьезоэлектрический
слой подается переменное
напряжение от генератора. Эти колебания
заставляют периодически сжиматься
и пленку из PVDF,
и промежуточный компрессионный слой,
и верхнюю пленку
из PVDF,
играющую роль приемника. Поскольку
пьезоэлектричество является
обратимым явлением, с верхней пленки
снимается переменное напряжение, которое
усиливается и выпрямляется на синхронном
демодуляторе, реагирующем как
на амплитуду, так и на фазу поступающего
сигнала. Когда к верхнему слою
прикладывается
внешняя сила F,
механические характеристики трехслойной
структуры
изменяются, что отражается на фазе и
амплитуде выходного сигнала.
В
Рис. 3
На рис. 4 А показан еще один вариант пьезоэлектрического тактильного датчика, в котором полоски из PVDF пленки встраиваются в слой резины на поверхности преобразователя. Такой датчик является пассивным устройством, поскольку для генерации выходного сигнала ему не требуется дополнительного возбуждения, поэтому он реагирует, в основном, на частоту механических воздействий, а не на их амплитуду. Конструкция данного датчика разработана для применения в робототехнике для отслеживания неровностей исследуемой поверхности. Поскольку здесь чувствительный элемент встроен в поверхностный слой, его выходной сигнал соответствует перемещениям этого слоя, возникающим из-за действия сил трения.
Датчик встраивается в жесткую конструкцию («палец» робота), имеющую пористый упругий внутренний слой (1 мм толщиной), на который наносится слой из силиконовой резины («кожа»). Иногда между этими слоями располагается вспомогательная жидкостная прослойка. Поскольку полоски из пьезоэлектрической пленки располагаются на некоторой глубине от поверхности «кожи», а их чувствительность зависит от их ориентации, величина сигнала определяется направлением перемещения «пальца». На рис. 4 Б показан биполярный выходной сигнал такого датчика, способного отслеживать неоднородности поверхности высотой порядка 50 мкм.
Рис. 4
Приведем
еще несколько примеров датчиков на
основе PVDF
и других полимерных
пленок [6]. Многие тактильные датчики
выполняют функции сенсорных
переключателей. В отличие от традиционных
переключателей, надежность
контактов которых сильно снижается при
попадании на них влаги и пыли,пьезоэлектрические
ключи, благодаря своему монолитному
исполнению, могут работать
в неблагоприятных условиях окружающей
среды. Один из вариантов таких
переключателей
состоит из стальной консольной балки,
на которую нанесен слой пьезоэлектрической
пленки. Балка одним концом прикреплена
к плате схемы (рис.
5 А), на входе которой стоит ключ на основе
полевого МОП транзистора, не потребляющего
энергию в нормально открытом состоянии.
Как только к балке будет приложено
механическое усилие, напряжение,
возникшее на пленке, мгновенно
переключит МОП ключ, и на его выходе
появится ВЫСОКИЙ уровень сигнала. Такой
сенсорный переключатель не подвержен
ни коррозии, ни выгоранию, у него нет
дребезга контактов, обычно присущих
традиционным механическим переключателям.
Он выдерживает до 10 миллионов циклов
безаварийной работы. Простота конструкции
делает такие переключатели привлекательными
для использования в различных промышленных
счетчиках, в системах автоматизации
технологических процессов,
в разливочных аппаратах и т.д., но самое
широкое распространение они получили
в игровых автоматах для игры в пинбол.
На рис. 5 Б показано устройство еще
одного пьезоэлектрического выключателя
консольного типа, в котором PVDF
пленка размещается между двух подложек
разной толщины. Такая конструкция
обеспечивает очень сильное растяжение
пьезопленки при отклонении балки от
нейтральной оси вверх и сильное ее
сжатие при отклонении балки в
противоположном
направлении. Рассматриваемые
пьезоэлектрические выключатели нашли
свое применение в счетчиках потребления
газа и электроэнергии. Для таких
переключателей не требуются внешние
источники питания, поэтому газовым
счетчикам
на их основе не страшны проскоки искр.
Пьезоэлектрические ключи балочного
типа часто монтируются в обод баскетбольной
корзины для определения попадания
в нее мяча. Такие переключатели также
встраиваются в мягкие куклы для
детектирования
поцелуя в щечку или щекотания каких-либо
ее частей, в торговые
Рис. 5
или игровые автоматы для их запуска при обнаружении опущенной монеты, в цифровые потенциометры для повышения надежности.
Тактильные элементы на основе пьезоэлектрических пленок способны работать в широких частотных и динамических диапазонах и поэтому часто используются в электронных музыкальных инструментах. Например, они встраиваются в педальные переключатели больших и малых барабанов, в переключатели тамтамов, а также в клавиши электропианино. Пьезоэлектрические пленочные сенсоры реагируют на силу, с которой барабанщик давит на педаль или пианист нажимает на клавишу. В электропианино встроенные в клавиши пьезоэлементы обеспечивают динамический диапазон и длительность звучания нот в строгом соответствии с ходом клавиши.
На текстильных заводах требуется проводить непрерывный мониторинг нескольких тысяч нитей на обрыв. Необнаруженный вовремя обрыв может привести к порче большого куска ткани, поскольку стоимость работ по реставрации материала часто превышает стоимость ее производства. Традиционные сенсоры, определяющие обрыв нити по замыканию контактов, не очень надежны, поскольку пух загрязняет контактные площадки и не дает возможности обнаруживать разрыв нити. Вибрационный датчик на основе пьезоэлектрической пленки, встроенный в тонкую стальную балку, отслеживает акустический сигнал, возникающий от трения нити при ее прохождении над балкой (рис. 5 В). Отсутствие характерных вибраций приводит к немедленной остановке ткацкого станка.
На рис. 6 показан датчик на основе PVDF пленки, используемый для контроля за частотой дыхания спящего ребенка. При этом детектируются малейшие движения тела, возникающие при вдохе и выдохе, что необходимо для обнаружения внезапной остановки дыхания [7]. Датчик размещается под матрасом кроватки. Тело нормально дышащего ребенка из-за подъема и опускания диафрагмы при дыхании совершает небольшие колебательные движения, что вызывает смещение его центра тяжести. Именно это смещение и контролируется датчиком. Датчик состоит из трех слоев: PVDF пленка расположена между подложкой из силиконовой резины и прижимного слоя из пластика, например, такого как МИаг. Сторона прижимного слоя, направленная к PVDF пленке, имеет гофрированную поверхность. Под действием переменной силы тяжести в PVDF слое возникает электрический заряд, поступающий на вход преобразователя ток-напряжение, с выхода которого снимается переменный выходной сигнал с амплитудой, пропорциональной в определенном диапазоне приложенной силе.
Рис. 6
 (2)
(2)
Рис. 7

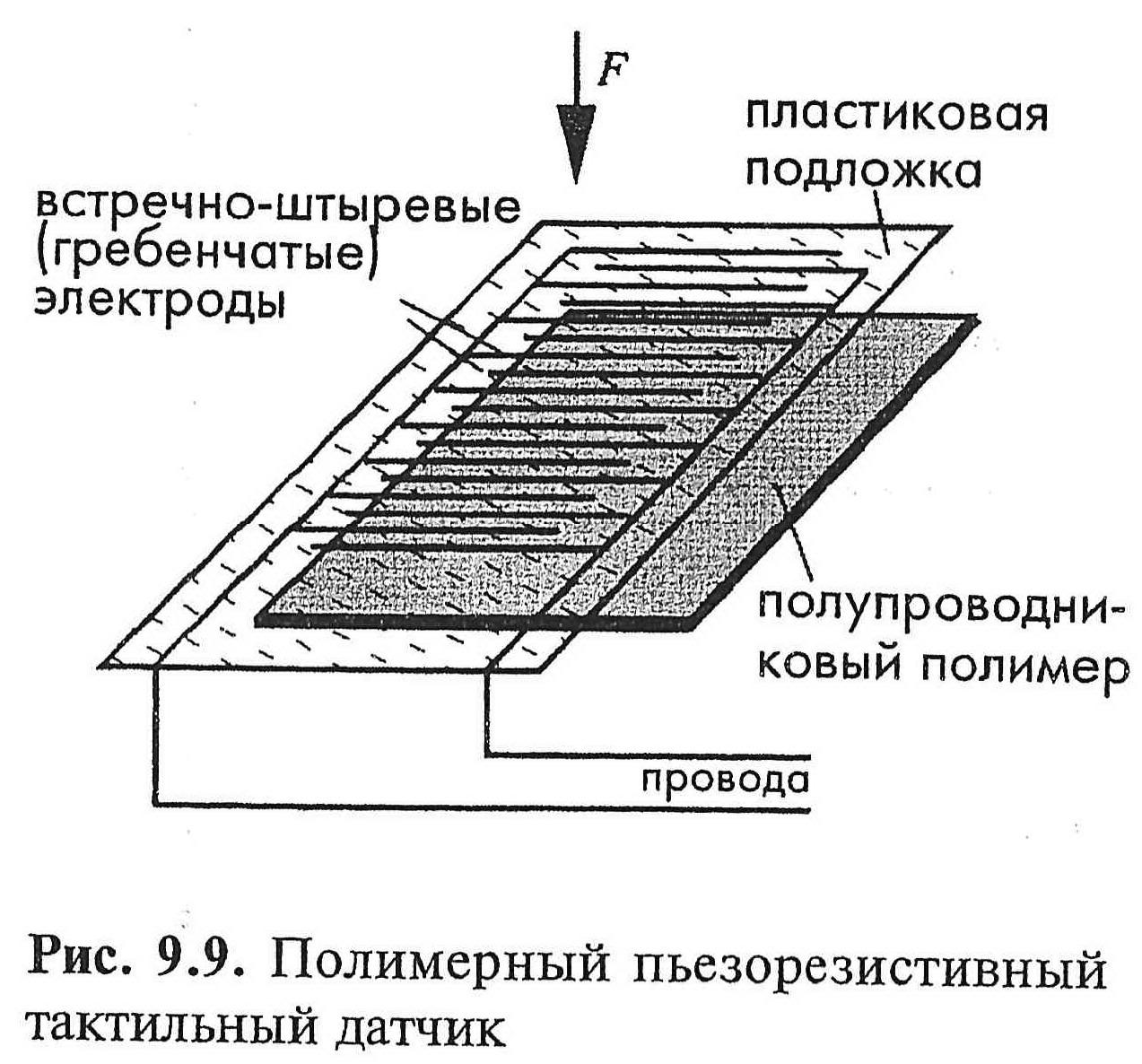
Однако следует отметить, что значения сопротивления может значительно дрейфовать, когда полимер подвергается действию давления длительное время. Поэтому такие пьезорезистивные датчики применяются, как правило, для качественных, а не количественных измерений.

Б
Рис. 8
В Рис. 9
Исследования показали, что такой ключ замыкается при давлении порядка 13 psi (фунт на квадратный дюйм), а его гистерезис равен 2 psi. Сопротивление ключа в разомкнутом состоянии составляет 10 кОм, что приемлемо для маломощных схем.
На рис. 10 показан еще один вариант тактильного микропереключателя [11], в котором вместо газа, находящегося под давлением, применяется вакуум. Здесь вакуумная микрокамера находится между холодным катодом и подвижным анодом в виде диафрагмы. Когда между анодом и кремниевым выступом на катоде появляются положительная разность потенциалов, формируется электрическое поле. Если напряженность поля превышает значение 5x107 В/см, электроны совершают туннельный переход с катода в вакуумную камеру. Сила поля, а, следовательно, количество испускаемых электронов (ток эмиссии) определяется величиной потенциала на аноде. Когда к аноду прикладывается внешняя сила, он опускается вниз, изменяя тем самым напряженность поля и ток эмиссии.
Ток эмиссии может быть выражен через напряжение на аноде V:
 (3)
(3)
Рис. 10
где а и b — константы, а β - геометрический коэффициент выступа на катоде, определяемый расстоянием между анодом и катодом. Для повышения чувствительности радиус кривизны выступа должен составлять порядка 0.02 мкм [1].