

Пьезоэлектрические датчики
Пьезоэлектрический датчик, измерительный преобразовательмеханического усилия в электрический сигнал; его действие основано на использовании пьезоэлектрического эффекта (Пьезоэлектричество).Пьезоэлектрические датчики широко используются в промышленности и во многих других отраслях. Существует большое количество пьезоэлектрических датчиков, такие какпьезоэлектрические датчики серии Т, волоконно-оптический пьезоэлектрический (кварцевый) датчик импульсного давления, пьезоэлектрические датчики вибрации, на основепьезоэлектричества работают и многие другие приборы, например пьезоэлектрический громкоговоритель.
[1]
Пьезоэлектрический датчик, измерительный преобразователь механического усилия в электрический сигнал; его действие основано на использовании пьезоэлектрического эффекта (см. Пьезоэлектричество). Один из вариантов конструкции П. д. давления показан на рис. Под действием измеряемого давления на внешней и внутренней сторонах пары пластин пьезоэлектрика возникают электрические заряды, причём суммарная эдс (между выводом и корпусом) изменяется пропорционально давлению. П. д. целесообразно применять при измерении быстроменяющегося давления; если давление меняется медленно, то возрастает погрешность преобразования из-за «стекания» электрического заряда с пластин на корпус. Включением дополнительного конденсатора параллельно П. д. можно уменьшить погрешность измерения, однако при этом уменьшается напряжение на выводах датчика. Основные достоинства П. д. — их высокие динамические характеристики и способность воспринимать колебания давления с частотой от десятков гц до десятков МГц. Применяются при тензометрических измерениях, в весовых и сортировочных (по весу) устройствах, при измерениях вибраций и деформаций и т.д.

Схема устройства пьезоэлектрического датчика давления: p — измеряемое давление; 1 — пьезопластины; 2 — гайка из диэлектрика; 3 — электрический вывод; 4 — корпус (служащий вторым выводом); 5 — изолятор; 6 — металлический электрод.
[1]
Измерительный преобразователь, средство измерений, преобразующее измеряемую физическую величину в сигнал для последующей передачи, обработки или регистрации. В отличие от измерительного прибора, сигнал на выходе И. п. (выходная величина) не поддаётся непосредственному восприятию наблюдателя. Обязательное условие измерительного преобразования — сохранение в выходной величине И. п. информации о количественном значении измеряемой величины. Измерительное преобразование — единственный способ построения любых измерительных устройств. Отличие И. п. от других видов преобразователей — способность осуществлять преобразования с установленной точностью. Измерительное преобразование одного и того же вида (например, температуры в механическое перемещение) может осуществляться различными И. п. (ртутным термометром, биметаллическим элементом, термопарой с милливольтметром и т. п.). Концепция представления измерительных устройств как устройств, осуществляющих ряд последовательных преобразований от восприятия измеряемой величины до получения результата измерения, первоначально была выдвинута в СССР М. Л. Цукерманом и окончательно сформулирована применительно к измерению неэлектрических величин Ф. Е. Темниковым и Р. Р. Харченко в 1948. В 60-х гг. эта концепция стала общепризнанной во всех областях измерительной техники, приборостроения и метрологии.
[1]
Принцип действия И. п. может быть основан на использовании практически любых физических явлений. Господствующей тенденцией в 40—70-х гг. 20 в. стало преобразование любых измеряемых величин в электрический сигнал. По виду преобразуемых величин различают И. п. электрических величин в электрические, электрических — в неэлектрические, неэлектрических — в электрические, неэлектрических — в неэлектрические. Примерами первых могут служить делители напряжения и тока, измерительные трансформаторы, измерительные усилители тока и напряжения; примерами вторых — механизмы электроизмерительных приборов, преобразующие изменение силы тока или напряжения в отклонение стрелки или светового луча, датчики ультразвуковых расходомеров и т. п.; примерами третьих — термопары, терморезисторы, тензорезисторы, фотоэлементы, реостатные, ёмкостные и индуктивные датчики перемещения; примерами четвёртых — пневматические И. п., рычаги, зубчатые передачи, мембраны, сильфоны, оптические системы и т. п. Конструктивное объединение нескольких И. п. является также И. п. Примерами такого объединения могут служить: датчик — совокупность И. п., вынесенных на объект измерения; так называемый промежуточный И. п. — совокупность И. п., преобразующих выходные сигналы датчиков в другие сигналы, более удобные для передачи, обработки или регистрации. По структуре составные И. п. подразделяют на И. п. прямого преобразования и уравновешивающего преобразования. Первые характеризуются тем, что все преобразования величин производятся только в одном (прямом от входной величины к выходной) направлении. В этом случае результирующая погрешность определяется суммой погрешностей (с учётом их корреляционных связей) всех составляющих И. п. Для вторых характерно применение обратного преобразования выходной величины в однородную с входной и уравновешивающую её величину. Результирующая погрешность при этом определяется лишь погрешностью обратного преобразования и степенью неуравновешенности. И. п. уравновешивания подразделяются на следящие преобразователи с обратной связью, статическим или астатическим уравновешиванием и преобразователи с программным уравновешиванием. Следящие И. п. с обратной связью обеспечивают непрерывность преобразования во времени; их недостаток — опасность потери устойчивости, проявляющейся в возникновении автоколебаний при увеличении глубины обратной связи. И. п. с программным уравновешиванием свободны от этого недостатка, но их особенностью является прерывность выходной величины, т. е. появление выходной величины лишь в отдельные дискретные моменты времени.
В 60-х гг. наметилась тенденция преобразования измеряемых величин в частоту электрических импульсов с помощью так называемых частотных И. п. Такие И. п. разработаны почти для всех известных физических величин. Основные достоинства частотных И. п. — простота и высокая точность передачи их выходной величины (частоты) по каналам связи, а также относительная простота цифрового отсчёта результата измерения с помощью цифровых частотомеров. В цифровых измерительных устройствах широко применяются И. п. аналоговых величин в цифровой код и наоборот. В них используются принципы как частотных И. п. (интегрирующие аналого-цифровые), так и программного уравновешивания (время-импульсные и поразрядного кодирования аналого-цифровые преобразователи).
[1,2]
Пьезоэлектричество (от греч. piézo — давлю и электричество), явления возникновения поляризации диэлектрика под действием механических напряжений (прямой пьезоэлектрический эффект) и возникновения механических деформаций под действием электрического поля (обратный пьезоэлектрический эффект). Прямой и обратный пьезоэлектрический эффекты наблюдаются в одних и тех же кристаллах — пьезоэлектриках. Первое подробное исследование пьезоэлектрических эффектов сделано в 1880 братьями Ж. и П. Кюри на кристалле кварца. В дальнейшем пьезоэлектрические свойства были обнаружены более чем у 1500 веществ, из которых широко используются сегнетова соль, титанат бария и др. (см. Пьезоэлектрические материалы). Пьезоэлектрические свойства кристаллов связаны с их структурой. Ими обладают все пироэлектрики (спонтанно поляризованные диэлектрики). При механической деформации пироэлектрика меняется величина его спонтанной поляризации, что и наблюдается как прямой пьезоэлектрический эффект. Пьезоэлектрические эффекты наблюдаются также в некоторых непироэлектриках (например, у кварца). Справедливо общее утверждение: кристаллы, обладающие центром симметрии, не могут быть пьезоэлектриками. Это объясняется тем, что при деформации кристалла центр симметрии сохраняется, а при наличии центра симметрии не может быть поляризации (рис. 1, 2). Наличие других элементов симметрии (оси, плоскости симметрии) может «запрещать» появление поляризации в определённых направлениях или при некоторых определённых деформациях (см. Симметрия кристаллов).
Количественными характеристиками П. в данном кристалле является совокупность пьезоконстант и пьезомодулей — коэффициент пропорциональности между электрическими величинами (напряжённость электрического поля Е, поляризация P) и механическими величинами (механические напряжения , относительные деформации u). Например, P = d. Коэффициент d и есть одна из пьезоконстант. Т. к. произвольное механическое напряжение может быть представлено как совокупность 6 независимых напряжений, а вектор поляризации P имеет 3 независимых компоненты, то в общем случае может быть 18 разных пьезоконстант d. Однако симметрия кристалла ограничивает число независимых и отличных от нуля пьезоконстант. Величина d зависит от условий опыта, а именно: она имеет одно значение d, если заряд на обкладках конденсатора (рис. 3) поддерживать равным нулю, и другое значение d', если обкладки конденсатора закорочены, т. е. Е = 0. Поэтому соотношение P = d целесообразно записывать, например, в виде: P = d' + Е. Величины d и d' связаны соотношением d’= d, где — диэлектрическая проницаемость кристалла.
Пьезоконстантами называются также коэффициенты r, g, h в соотношениях P = ru + ’Е, u = S' + hP, u = S' + hE и т.п. Все пьезоконстанты d, r, g, h связаны друг с другом, так что при описании пьезоэлектрических свойств кристалла можно ограничиться только одной, например d. Характерная величина пьезоконстанты d в системе СГСЭ составляет для кварца 310—8. Существенно больших величин могут достигать пьезоконстанты сегнетоэлектриков, что связано с их высокой диэлектрической проницаемостью и доменной структурой, которая может перестраиваться при деформации.
Пьезоэлектрики широко применяют в технике, акустике, радиофизике и т.д. Их применение основано на преобразовании электрических сигналов в механические и наоборот. Пьезоэлектрики используются в резонаторах, входящих в состав генераторов (см. Кварцевый генератор), фильтров, различного рода преобразователей и датчиков.

Рис. 2. а — плоская модель кристалла, обладающего центром симметрии; б — тот же кристалл, подвергнутый сжатию.

Рис. 1. а — плоская модель кристалла, не имеющего центра симметрии; центры тяжести положительных и отрицательных зарядов совпадают, стрелки изображают отдельные электрические дипольные моменты одной группы зарядов; б — тот же крисстал, подвергнутый сжатию, при котором изменяются длины связей между зарядами каждой группы, но не углы между ними; горизонтальная стрелка слева — суммарный электрический дипольный момент одной группы зарядов.

Рис. 3. а — прямой пьезоэлектрический эффект; сжатие или растяжение пьезоэлектрической пластины приводит к возникновению разности потенциалов; б — обратный пьезоэлектрический эффект; в зависимости от знака разности потенциалов, приложенной к пьезоэлектрической пластинке, она сжимается или растягивается.
[3,4]
ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГРОМКОГОВОРИТЕЛЬ, громкоговоритель, в котором в качестве преобразователя электрич. колебаний (звуковых частот) в механические используют пьезоэле-мент (см. Пьезоэлектричество). Наибольшее распространение получили П. г. с плоским (квадратным в плане) пьезоэлементом из сегнетовой соли. К свободному углу такого элемента приклеивается своей вершиной конич. диафрагма - излучатель звука. П. г., несмотря на низкое качество их звучания и малую надёжность пьезоэлементов, выпускались в СССР в годы Великой Отечеств. войны 1941-45 и в первые послевоен. годы как наиболее дешёвые и простые в изготовлении
[3,4]
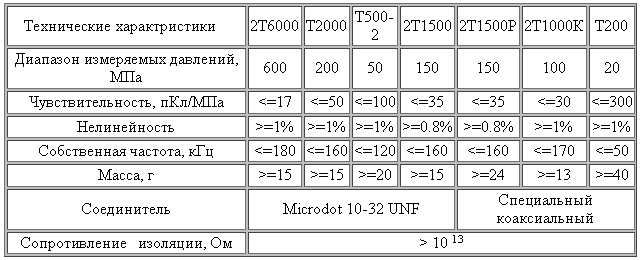
Пьезоэлектрические датчики серии Т предназначены для измерениядавлений газов и жидкостей в диапазоне от 0 до 600 МПа.
Состав: Датчик давления пьезоэлектрический, кабель соединительный, кольцо уплотнительное, пластина защитная, смазка термозащитная. Пьезоэлектрические датчики серии Т предназначены для измерения динамических и квазистатических давлений газов и жидкостей в диапазоне от 0 до 600 МПа, возникающих при выстреле, в манометрической бомбе, в камерах сгорания двигателей, в топливной аппаратуре и т.д.
Отличительные особенности: - Высокая точность преобразования - Миниатюрное исполнение - Низкая чувствительность к ускорению - Устойчивость к воздействию ударов и вибраций
Технические характеристики
[5]
Пьезоэлектрические датчики вибрации
Пьезодатчики вибрации или векторные виброакселерометры применяются для определения режимов вибрации различных машин и механизмов. Область применения датчиков вибрации пьезоэлектрических МВ-06, МВ-37, МВ-38: Авиация, автотранспорт, морской и железнодорожный транспорт.
Датчики вибрации пьезоэлектрические МВ-06, МВ-37, МВ-38 предназначены для: - Преобразования ускорений в широкой полосе частот - Работы в составе аппаратуры контроля вибрации авиационных ГТД. Достоинства: - Высокая надежность, высокий срок службы - Малые масса и габариты - Выходной сигнал дифференциальный, изолирован от корпуса датчика

[5,6]
Волоконно-оптический пьезоэлектрический (кварцевый) датчик импульсного давления
Волоконно-оптический пьезоэлектрический датчик импульсного давления (см. Толстиков И.Г., Мартыш-кин В.П., Долгов В.И. Заявка на изобретение «Емкостный датчик», № 2005110481 от 11.04.2005) содержит чувствительный элемент в виде плоского пьезоэлемента с входным и выходным электродами на двух противо-положных поверхностях, перпендикулярных полярной оси пьезоэлемента, и измерительную линию (см. рис. 7—9). При этом входной и выходной электроды электрически непосредственно соединены друг с другом, а измери-тельная линия выполнена в виде оптического канала для измерения параметров движения поверхности пьезо-элемента с выходным электродом. Одним из вариантов выполнения чувствительного элемента датчика являет-ся полностью экранированный пьезоэлемент в виде диска из кварца х-среза с нанесенным на всю его поверх-ность проводящим покрытием. Ультразвуковые колебания зондируемой лазерным лучом свободной поверхно-сти такого полностью экранированного пьезоэлемента возникают за счет внутренних электрических полей, индуцированных ударной волной с момента ее прихода на нагружаемую поверхность пьезоэлемента. Прототи-пом является известный пьезоэлектрический датчик импульсного давления [19, 20] с электрическим выходом, предназначенный для регистрации профиля давления (напряжения) плоской ударной волны при одномерном нагружении.
Пьезоэлектрический датчик импульсного давления содержит корпус, чувствительный элемент в виде плоского пьезоэлемента (диска) из кварца х-среза с входным и выходным электродами на двух противоположных поверхностях, перпендикулярных полярной оси х пьезоэлемента и направлению распро-странения импульса давления. Входной и выходной
Снежинск, 5⎯9 сентября 2005 г.
Электроды электрически непосредственно соединены друг с другом, например, путем нанесения на все поверхности чувствительного элемента, свободные от плоских электродов , дополнительного сплошного электрода с образованием полностью экранированной конструкции. В случае, если пьезоматериал в отличие от кварца обладает не только продольным, но также и поперечным пьезоэффектом, когда при деформации вдоль рассматриваемой полярной оси поляризационные заряды возникают также и на боковой поверхности пьезоэлемента, последняя изолируется слоем диэлектрика. Слой диэлектрика может наносится также с це-лью уменьшения влияния боковой разгрузки. Измерительная линия выполнена в виде оптического канала, содержащего (отражающую) поверхность выходного электрода и волоконный световод, торец которого направлен к центру пьезоэлемента. Волоконный световод обеспечивает передачу оптических сигналов к оптическому регистратору (интерферометру).
Принцип действия пьезоэлектрического датчика импульсного давления (кварцевого датчика) заключается в том, что в процессе преобразования информативного сигнала чувствительный элемент датчика используется не только в качестве (механоэлектрического) преобразователя механической энергии нагружающего импульса в электрическую за счет прямого пьезоэффекта как в прототипе, но и одновременно в качестве (электромеха-нического) преобразователя электрической энергии в механическую за счет обратного пьезоэффекта. При этом прямое преобразование происходит в сжатой, а обратное - в несжатой зонах пьезоэлемента, разделенных дви-жущимся волновым фронтом. Поэтому геометрические размеры этих зон (преобразователей) изменяются со временем: ширина сжатой зоны увеличивается и равна U⋅t, а ширина несжатой зоны соответственно уменьша-ется и равна L—U⋅t в любой момент времени 0 ≤ t ≤ T. Преобразование информативного сигнала в рассматри-ваемом датчике происходит в интервале времени 0 ≤ t ≤ T по следующему новому пути: исследуемый профиль импульса давления р(t) в образце — профиль упругой волны σ(t) в пьезоэлементе – временная зависимость электрического поля в несжатой зоне Е1(t) — профиль вторичной упругой волны σr(t), возникающей за счет обратного пьезоэффекта в несжатой зоне и движущейся в обратном направлении от выходного электрода к входному — временная зависимость скорости (смещения) выходной поверхности пьезоэлемента w(t) — реги-стрируемый с помощью лазерных интерферометрических методов оптический сигнал.
Основные соотношения для связи между регистрируемым сигналом w(t) и давлением р(t) в образце записываются здесь следующим образ
р(t) = σ(t)⋅Zо;
Р(t) = к⋅σ(t), для прямого пьезоэффекта;
Е1(t) = к⋅σ(t)⋅t / ε⋅ε0⋅T;
σе (t) = е⋅Е1(t), для обратного пьезоэффекта в несжатой зоне;
w(t) = σе (t) / ρ ⋅U;
р(t) = К0⋅w(t) / t;
где ε0 — электрическая постоянная; σе (t) — механическое напряжение, индуцированное полем Е1(t) в несжа-той зоне; e — пьезоконстанта пьезоматериала, e11 для кварца х-среза; ρ - плотность пьезоматериала; К0 = ε⋅ε0⋅ρ ⋅L⋅Zо / e⋅ к — константа в конкретном опыте.
Как видно из последнего соотношения искомый профиль импульса давления р(t) можно легко получить из экспериментальной зависимости w(t) расчетным путем.
Пьезоэлектрический датчик импульсного давления функционирует следующим образом. Датчик устанав-ливается на поверхность исследуемого образца. Плоская ударная волна (импульс давления) р(t) из образца переходит через контактную поверхность в датчик и вызывает появление в пьезоэлементе 3 упругой ударной волны σ(t), движущейся со скоростью U и вызывающей, в свою очередь, диэлектрическую поляризацию Р(σ) пьезоматериала в сжатой зоне пьзоэлемента
случая, когда направление движения волны σ(t) совпадает с направлением вектора Р(σ) и, следовательно, полярной оси х кварца. Индуцированный поляризацией заряд стекает с электродов 4 и 5 через дополнительный электрод (нагрузку) 7, сопротивление R которого близко к нулю. Поэтому пьезопреобразователь работает в режиме источника тока и становятся справедливыми приведенные выше соотношения и теория пьезоэлектри-ческого (кварцевого) датчика [1, 19, 20]. В соответствии с последней, несмотря на то, что напряжение между электродами 4 и 5 равно нулю, внутри пьезоэлемента возникают сильные электрические поля как в сжатой 13 (поле Е2), так и несжатой 14 (поле Е1) зонах, разделенных фронтом ударной волны σ(t), направление которых показаны соответствующими стрелками на рис. 8. В несжатой зоне 14 поле Е1 монотонно (линейно при σ = const) увеличивается со временем от нулевого значения до максимального Еmax= к⋅σ(t) /ε⋅ε0 в интервале 0 ≤ t ≤ T. В сжатой зоне 13 поле Е2 наоборот уменьшается аналогичным образом. При появлении электрическо-го поля в несжатой зоне 14 мгновенно возникают механические напряжения σе (t), обусловленные обратным пьезоэффектом, релаксация которых происходит путем образования на свободной поверхности пьезоэлемента вторичной упругой волны 15 σr(t), движущейся со скоростью U в направлении от выходного электрода 5 к входному 4, противоположном направлению распространения основной волны σ(t). Отметим, что, поскольку поле Е2 стремиться противодействовать сжатию волны σ(t), а поле Е1 направлено в противоположном Е2 направлении, то напряжение σе (t) является сжимающим в рассматриваемом случае, а волна σr(t) есть волна разгрузки. Волна σr(t) образуется в результате распада произвольного разрыва на свободной поверхности пьезоэлемента с выходным электродом непрерывно в интервале времени 0 < t < T, поскольку механическое напряжение в непосредствен-ной близости к этой поверхности, равное σе(t), монотонно растет вместе с полем Е1. При этом названная по-верхность движется со скоростью w(t) = σе(t) / ρ⋅U, определяемой из закона сохранения количества движения [1, 20], в направлении, противоположном направлению распространения волныσr(t). Прецизионное измерение скорости свободной поверхности w(t) непосредственно или ее смещения с последующим диффе-ренцированием и определением w(t) расчетным путем производится с помощью оптического канала, содержащего (отражающую) поверхность выходного электрода и волоконный световой, торец которого направлен к центру пьезоэлемента. Волоконный световой обеспечивает передачу оптических сигналов к оптическому регистратору, например, лазерному интерферометру для измерений ультразвуковых колебаний [13, 16]. Исследуемый импульс давления в образце р(t) = К0⋅w(t) / t определяется по экспериментальной зависимости w(t), расчетным путем.
С момента t = T прихода на свободную поверхность с выходным электродом основной упругой волны σ(t) в результате распада произвольного разрыва на свободной поверхности образуется волна разгрузки, движу-щаяся от выходного электрода 5 к входному 4, а свободная поверхность движется в противоположную сторону со скоростью W, значительно превышающей скорость w. Поэтому в момент времени t = Т происходит резкий скачок скорости свободной поверхности, который точно регистрируется. Измерение скорости W с помощью оптического канала позволяет получить дополнительную информацию об исследуемом импульсе, в частности, определить его амплитуду р0 =ρ ⋅U⋅Wmax⋅ Zо и длительность переднего фронта.
Приведем расчетный пример. При нагружении кварца х-среза плоской ударной волной амплитудой σ = 1 ГПа поляризация в сжатой зоне составит Р = к⋅σ = 2,01 мКл/м2, максимальная напряженность электриче-ского поля — Еmax = Р/ε⋅ε0 = 50,4 кВ/мм, амплитуда σr вторичной волны σr =σе(T) = e11⋅Е1(T) = 9,1 МПа, мак-симальная скорость wmax свободной поверхности — wmax = σе(T) / ρ ⋅U = 0,6 м/c. При этом деформация пьезо-элемента толщиной L = 1мм в момент времени t = T составит приблизительно величину 50 нм, значительно превышающую чувствительность современных интерферометров, оцениваемую значением не менее 10-4 нм. Скорость Wmax свободной поверхности составит Wmax = σ / ρ ⋅U = 66 м/c. Для расчета приняты значения: к=2,01пКл/Н, ε0 = 8,854⋅10-12Ф/м, ε = 4,5, e11 = 0,18 Кл/м2, ρ =2,65 ⋅103 кг/м3, U = 5,72 км/c.
Пьезоэлектрические преобразователи ПЭП 3-4 (ПЭП 3-1, ПЭП 3, и т.п.) предназначены для создания в жидкостях ультразвуковых колебаний, их приема с последующим преобразованием в электрический сигнал в составе ультразвуковых счетчиков жидкостей и тепла.
Пьезоэлектрические преобразователи ПЭП 3-4 (ПЭП 3-1, ПЭП 3, и т.п.) используются для комплектации счетчиков воды, жидкостей, тепла, а также для ремонта узлов учета энергоносителей на базе ультразвуковых расходомеров US-800, UFM-001, UFM-003, UFM-005, УЗР (или аналогичных ультразвуковых расходомеров время-импульсного принципа действия), а также в новых разработках ультразвуковых расходомеров воды, нефтепродуктов или других жидких сред.

Отличительные особенности и преимущества:
Универсальность применения!
Пьезоэлектрические датчики ПЭП успешно эксплуатируются в системах, контролирующих расход холодной и горячей вода, загрязненной и теплофикационной воды, нефтепродуктов, химических веществ, пищевых продуктов и т.п. в трубопроводах диаметрами до 1800 мм.
Диапазон рабочих температур от -40 до +150 С!
Давление жидкости до 6,3 МПа!
Высокая чувствительность! Капсулирование пьезоэлемента в композиционный материал позволяет при эксплуатации УЗ датчика ПЭП сохранить постоянную амплитудно-частотную характеристику, поскольку не требует постоянного поджима элементов преобразователя. Чувствительность и длительность с крутым формируемым импульсом сохраняются при вибрационных нагрузках, индустриальных шумах, грохоте, свисте и т.д. Пьезоэлектрические преобразователи ПЭП отличаются повышенной надежностью и простотой конструкции. Обеспечивают высокую степень акустического согласования с объектом контроля, имеют акустический (электрический) сигнал высокой крутизны и
малой длительности, не искаженный акустическими помехами.
Удобное соединение и подключение!Используются высокопрофессиональные промышленные разъемы HIRSСHMANN (Германия). Надежная фиксация вилочной и розеточной частей с помощью винта позволяет работать в условиях повышенной вибрации. Исключается операция пайки. Имеют в подключенном состоянии степень защиты IP67.