

1. Примеры и классификация сау
Управление – это любое действие, вносящее желаемое изменение в процесс, подлежащий управлению и основанное на использовании начальной или текущей информации. Объект, в котором протекает управляемый процесс, будем называть объектом управления (ОУ). Управление называется автоматическим, если оно осуществляется с помощью специальных технических устройств без участия оператора (человека). Разработка принципов создания таких устройств для объектов различной природы (физической, химической, биологической) является основной задачей теории автоматического управления.
Все системы автоматического управления (САУ) можно разделить на два класса:
- разомкнутые, в которых управление формируется по заранее заданному закону времени;
- замкнутые (САУ с обратной связью), в которых управление является функцией параметров, характеризующих состояние объекта управления.
В данном курсе рассматриваются только замкнутые САУ.
В самом общем случае любая система управления строится в соответствии со следующей, типовой функциональной схемой (рис. 1).

Рис. 1. Типовая функциональная схема САУ:
y(t) - регулируемая величина (выходной сигнал);
u(t) - задающее воздействие (входной сигнал);
n(t) - помеха;
f(t) - возмущающее воздействие на ОУ;
1 – регулятор;
2 – усилительное устройство;
3 – исполнительное устройство;
4 – объект управления;
5 – измерительное устройство
Функциональное
назначение элементов типовой схемы
заключается в следующем. Входной сигнал
u(t)
сравнивается с выходным сигналом y(t)
(предполагается, что измерительное
устройство 5 не искажает выходной сигнал)
и результат сравнения (ошибка)
![]() поступает на регулятор, в котором
производится необходимое преобразование
сигнала ошибки в управляющий сигнал.
Этот сигнал после усиления подается на
исполнительное устройство, которое
воздействует на управляющий орган и,
следовательно, на ОУ.
поступает на регулятор, в котором
производится необходимое преобразование
сигнала ошибки в управляющий сигнал.
Этот сигнал после усиления подается на
исполнительное устройство, которое
воздействует на управляющий орган и,
следовательно, на ОУ.
Реальные САУ могут содержать дополнительные внутренние обратные связи (обратная связь на рис. 1 называется главной обратной связью).
Подробные сведения об усилителях, исполнительных устройств и измерительных элементах содержатся в курсе «Технические средства автоматики», поэтому здесь дается только краткий перечень используемых устройств.
Исполнительное устройство выполняет функцию преобразования управляющего, как правило, электрического сигнала, в управляющее воздействие необходимого вида (механическое усилие и т.д.).
В САУ часто применяются следующие виды исполнительных устройств: гидравлические, пневматические, электрические. Например, исполнительное устройство в системе управления самолетом (рулевой привод) представляет сложную систему автоматического регулирования, которая должна в достаточно широком диапазоне частот обеспечить поворот рулей пропорционально управляющему сигналу.
Измерительные устройства представляют собой различного типа датчики информации о состоянии ОУ. Информация с датчиков выдается в виде электрических сигналов – аналоговых или цифровых.
Примеры некоторых датчиков:
- датчики относительного перемещения, кроме того, в качестве датчиков относительного перемещения используются сельсины, вращающиеся трансформаторы, индукционные датчики и т.д. (рис. 2);
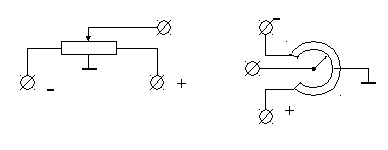
Рис. 2. Измерительные потенциометры
- датчики относительной угловой скорости (рис.3);
- датчики абсолютной угловой скорости (гироскопические) и т.д.;
- датчики абсолютного ускорения (акселерометры) (рис. 4);
- датчики скорости (радиотехнические, воздушные, гироскопические и т.д.);
- датчики давления (измерительная мембрана и т.д.);
- датчики температуры (термопары и т.д.);
- датчики углового положения объекта (крен, тангаж, курс, угол атаки) - гироскопические датчики.

Рис. 3. Тахогенератор

Рис. 4. Акселерометр с электрической пружиной
Примеры систем автоматического управления (САУ)
Одними из характерных примеров систем автоматического управления являются следящие системы различного назначения и конструктивного исполнения. Достаточно общими признаками следящих систем являются следующие:
- отработка с минимальной ошибкой входного сигнала в заданном частотном диапазоне;
- воспроизведение маломощного входного сигнала в виде того иного движения энергоёмкого объекта управления;
- многократное преобразование вида энергии информационного сигнала.
В качестве примера можно привести систему стабилизации орудийной установки на палубе судна, в которой по сигналу миниатюрного гироскопического прибора, являющимся датчиком плоскости горизонта, разворачивается по отношению к палубе и компенсируя качку судна многотонное орудие.
Требования, предъявляемые к точности воспроизведения входного сигнала следящей системой, могут быть различными и от этого зависит как выбор элементов САУ, так и сложность построения структурной схемы.
Принцип работы следящей системы достаточно просто и наглядно можно уяснить на примере идеализированной электромеханической следящей системы.
Электромеханическая следящая система (рис. 5).

Рис. 5
Следящая система должна обеспечивать поворот платформы 3 (объект управления) в соответствии с поворотом задающего устройства 5. Если угол «β» не равен «α», то в сравнивающем устройстве 6 вырабатывается сигнал ошибки ε=α-β, который усиливается и при необходимости преобразовывается для обеспечения устойчивости и точности в усилителе (регуляторе) 7. Управляющий сигнал подается на электродвигатель 1, который через редуктор 2 разворачивает платформу 3 так, чтобы угол «β» стал равен углу «α».
2. Упрощенная система автоматического управления летательного аппарата по курсу (рис. 6).

Рис. 6
На рис. 7 показана структурная схема, соответствующая функциональной схеме на рис. 6.

Рис. 7. Структурная схема системы автоматического управления летательного
аппарата по курсу: 1 – гироскоп направления; 2 – задатчик курса;
3 – усилитель; 4 – сумматор; 5 – усилитель; 6 – электрическая рулевая
машина; 7 – тросовая тяга; 8 – датчик обратной связи; 9 – перо руля
3. Система автоматического управления летательного аппарата по тангажу (рис. 8).

Рис. 8
![]() –угол тангажа;
– угол руля высоты; 1 – гировертикаль;
2 – сумматор;
–угол тангажа;
– угол руля высоты; 1 – гировертикаль;
2 – сумматор;
3 – усилитель; 4 – рулевая машина; 5 – датчик обратной связи
В соответствии с [4] можно предложить классификацию САУ по признаку начальной (априорной) и рабочей информации.
Начальная или априорная информация – совокупность сведений об управляемом процессе и управляемой системе известные до начала функционирования системы.
Рабочая информация – совокупность сведений о состоянии процесса, которые измеряются и используются во время функционирования САУ.
Рабочая информация передаётся в виде сигналов – физических процессов, несущих информацию.
Например, в автопилоте, стабилизирующем курс, тангаж и крен самолёта, рабочей информацией будут отклонения курса, крена и тангажа от заданных значений и производные от этих отклонений.
В данном курсе лекций будут рассмотрены только обыкновенные CАУ, т.е. системы, не обладающие способностью автоматического приспособления к изменяющимся внешним условиям и свойствам управляемого процесса.
Основное внимание в курсе будет уделено замкнутым системам, т.е. системам с обратной связью, которые условно разделены на две группы:
- стабилизирующие, в которых значения регулируемых величин постоянны;
- следящие, в которых значения регулируемых величин могут изменяться в некоторых пределах произвольным, в том числе и заранее неизвестным образом.
Разомкнутые САУ – это системы, в которых не используется принцип обратной связи. Подразделяются на системы с компенсацией и программного управления.
В системах с компенсацией производится измерение возмущающих воздействий и компенсация их влияний путем создания противодействующих факторов.
В системах программного управления выполняется заданная последовательность действий, информация о которых хранится в запоминающем устройстве, и которые не корректируются в процессе управления.
В комбинированных САУ, наряду с принципом обратной связи используется и возможность компенсации возмущающих воздействий, при этом, естественно, можно добиться повышенной точности САУ и обеспечить инвариантность по отношению к отдельным возмущениям.
Адаптивные системы отличаются от предыдущих тем, что обладают способностью в той или иной мере приспосабливаться к изменяющимся внешним условиям, при этом эти системы не требуют полной начальной информации.
Эти САУ разделяются на системы экстремального регулирования, в которых рабочей информацией является отклонение от экстремума некоторой функции одной или нескольких переменных и самонастраивающиеся системы, которые могут автоматически изменять параметры или структуру в зависимости от внешних условий.
Классификация САУ
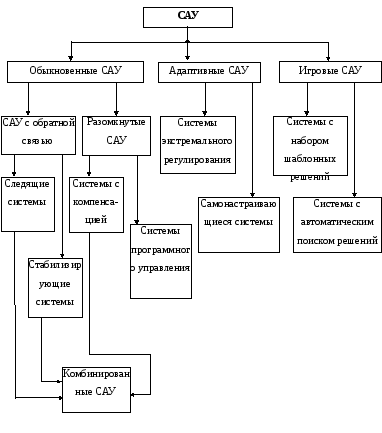
В отдельный класс выделены игровые САУ, в которых на основе теории игр решаются задачи автоматического управления.
Приведенная выше классификация не исчерпывает всё многообразие существующих в настоящее время САУ. Например, если выбрать другие классификационные признаки, то САУ можно разделить на:
- непрерывные и дискретные (в дискретных САУ информация передаётся в виде квантованных по времени или по уровню сигналов. Если квантование сигналов производится только по времени, то такие системы называются импульсными);
- линейные и нелинейные, в зависимости от того, линейными или нелинейными уравнениями представлена математическая модель САУ;
- стационарные и нестационарные, в зависимости от того, постоянными и переменными являются параметры САУ;
- детерминированные и стохастические;
- одноконтурные и многоконтурные;
и т.д.