

2.9.3. Коэффициенты ошибок
Если
функция
![]() дифференцируема и после окончания
переходного процесса существенное
значение имеет только конечное числоi
ее производных, то установившуюся ошибку
можно определить следующим образом.
дифференцируема и после окончания
переходного процесса существенное
значение имеет только конечное числоi
ее производных, то установившуюся ошибку
можно определить следующим образом.
Положим
для простоты, что возмущающее воздействие
отсутствует
![]() .
В соответствии с выражением (2.126) запишем
изображение ошибки:
.
В соответствии с выражением (2.126) запишем
изображение ошибки:
![]() .
(2.218)
.
(2.218)
Разложим
передаточную функцию замкнутой системы
относительно ошибки по задающему
воздействию
![]() в ряд Тэйлора, тогда выражение (2.218)
принимает вид
в ряд Тэйлора, тогда выражение (2.218)
принимает вид
![]() ,
(2.219)
,
(2.219)
где
![]() ,
,![]() ,
…,
,
…,![]() – коэффициенты ошибок.
– коэффициенты ошибок.
Переходя от изображения ошибки (2.219) к оригиналу, получим
![]() .
(2.220)
.
(2.220)
Коэффициенты ошибок можно определить следующими способами.
I. Воспользоваться известными формулами:
 ;
(2.221)
;
(2.221)
 ;
(2.222)
;
(2.222)
 ;
(2.223)
;
(2.223)
……………………..;
 .
(2.224)
.
(2.224)
Рассмотрим в качестве примера простейшую САУ, структурная схема которой приведена на рисунке 2.83.

Рисунок 2.83
Передаточная функция прямой цепи рассматриваемой системы
![]() .
(2.225)
.
(2.225)
Тогда передаточная функция замкнутой системы относительно ошибки по задающему воздействию имеет вид
![]() .
(2.226)
.
(2.226)
Определим
коэффициенты
![]() ,
,![]() ,
,![]() .
Согласно выражению (2.221), величина
.
Согласно выражению (2.221), величина![]() будет
будет
 .
(2.227)
.
(2.227)
Для
расчета коэффициента
![]() возьмем первую производную от передаточной
функции (2.226):
возьмем первую производную от передаточной
функции (2.226):
![]() .
(2.228)
.
(2.228)
В
соответствии с формулой (2.213) коэффициент
![]() будет
будет
![]() .
(2.229)
.
(2.229)
Для
определения коэффициента
![]() возьмем вторую производную от передаточной
функции (2.226):
возьмем вторую производную от передаточной
функции (2.226):
 .
(2.230)
.
(2.230)
Тогда
на основании формулы (2.223) коэффициент
![]() будет
будет
![]() .
(2.231)
.
(2.231)
II.
Если
![]() является дробно-рациональной функцией
вида (2.3), то ее разложение в ряд Тэйлора
с последующим выделением коэффициентов
ошибок можно осуществить простым
делением полинома числителя на полином
знаменателя, располагая члены полиномов
в порядке возрастания степеней.
является дробно-рациональной функцией
вида (2.3), то ее разложение в ряд Тэйлора
с последующим выделением коэффициентов
ошибок можно осуществить простым
делением полинома числителя на полином
знаменателя, располагая члены полиномов
в порядке возрастания степеней.
Разделим полином числителя (2.226) на полином знаменателя:
![]() (2.232)
(2.232)
Сравнивая (2.232) и (2.219), получим
![]() ,
(2.233)
,
(2.233)
![]() ,
(2.234)
,
(2.234)
![]() .
(2.235)
.
(2.235)
Из формулы (2.235) следует
![]() .
(2.236)
.
(2.236)
Покажем,
как можно определить
![]() с помощью коэффициентов ошибок на
примере САУ (см. рис. 2.83).
с помощью коэффициентов ошибок на
примере САУ (см. рис. 2.83).
Пусть на вход системы подается задающее воздействие вида
![]() .
(2.237)
.
(2.237)
В соответствии с формулой (2.220) необходимо взять первую производную от задающего воздействия (2.237)
![]() .
(2.238)
.
(2.238)
Тогда, согласно формуле (2.220), величина установившейся ошибки
![]() ,
(2.239)
,
(2.239)
или
![]() .
(2.240)
.
(2.240)
Учитывая выражения (2.233) и (2.234), окончательно получим
![]() .
(2.241)
.
(2.241)
Полученный
результат подтверждает вывод, сделанный
в пп. 2.9.2: если
степень временной функции задающего
воздействия
m
(в рассмотренном
примере m
= 1) больше
порядка астатизма системы
![]() (
(![]() ),
то с течением времени ошибка неограниченно
возрастает:
),
то с течением времени ошибка неограниченно
возрастает:
![]() .
.
Так,
на рисунке 2.84 приведены графики изменения
во времени задающего воздействия
(2.237), выходной величины
![]() и ошибки регулирования
и ошибки регулирования![]() в системе (см. рис. 2.83).
в системе (см. рис. 2.83).

Рисунок 2.84
Данное
обстоятельство (неограниченный рост
ошибки при
![]() )
необходимо учитывать при проектировании
систем управления соответствующим
выбором порядка астатизма САУ.
)
необходимо учитывать при проектировании
систем управления соответствующим
выбором порядка астатизма САУ.
Отметим,
что результат вычисления установившейся
ошибки
![]() с помощью формулы (2.220) справедлив только
после окончания переходного процесса
в системе (рис. 2.85).
с помощью формулы (2.220) справедлив только
после окончания переходного процесса
в системе (рис. 2.85).
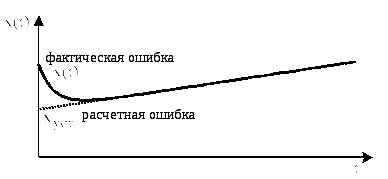
Рисунок 2.85