

2.6. Передаточные функции замкнутой сау по задающему воздействию и возмущению
Большинство структурных схем САУ с помощью рассмотренных ранее преобразований можно привести к виду, приведенному на рисунке 2.52.
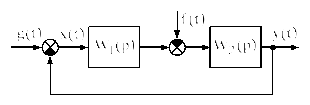
Рисунок 2.52
Введем обозначения:
 (2.124)
–
передаточная
функция замкнутой системы
по задающему
воздействию.
(2.124)
–
передаточная
функция замкнутой системы
по задающему
воздействию.
Определяет
связь между выходной величиной
![]() и задающим воздействием
и задающим воздействием![]() при возмущении
при возмущении![]() ;
;
 –передаточная
функция замкнутой системы (2.125)
по возмущающему
воздействию.
–передаточная
функция замкнутой системы (2.125)
по возмущающему
воздействию.
Определяет
связь между выходной величиной
![]() и возмущением
и возмущением![]() при задающем воздействии
при задающем воздействии![]() ;
;
 –передаточная
функция замкнутой системы
(2.126)
относительно
ошибки по задающему воздействию.
–передаточная
функция замкнутой системы
(2.126)
относительно
ошибки по задающему воздействию.
Определяет
связь между ошибкой регулирования
![]() и задающим воздействием
и задающим воздействием![]() при возмущении
при возмущении![]() ;
;
 –передаточная
функция замкнутой системы относительно
ошибки по возмущающему воздействию.
(2.127)
–передаточная
функция замкнутой системы относительно
ошибки по возмущающему воздействию.
(2.127)
Определяет
связь между ошибкой регулирования
![]() и возмущением
и возмущением![]() при задающем воздействии
при задающем воздействии![]() .
.
Сформируем передаточные функции (2.124) – (2.127) с помощью правила (2.122). Очевидно, что передаточная функция разомкнутой цепи будет одинаковой для всех формул (2.124) – (2.127):
![]() .
(2.128)
.
(2.128)
С
этим результатом совпадает передаточная
функция прямой цепи от точки приложения
![]() до выходной величины
до выходной величины![]() (составляющая формулы (2.124)):
(составляющая формулы (2.124)):
![]() .
(2.129)
.
(2.129)
Тогда передаточная функция замкнутой системы по управляющему воздействию (2.124) принимает вид
![]() .
(2.130)
.
(2.130)
Передаточная
функция прямой цепи от точки приложения
возмущения
![]() до выходной величины
до выходной величины![]() (составляющая формулы (2.125)):
(составляющая формулы (2.125)):
![]() .
(2.131)
.
(2.131)
В результате передаточная функция замкнутой системы по возмущающему воздействию (2.125) принимает вид
![]() .
(2.132)
.
(2.132)
Передаточная
функция прямой цепи от точки приложения
![]() до ошибки регулирования
до ошибки регулирования![]() (составляющая формулы (2.126)):
(составляющая формулы (2.126)):
![]() .
(2.133)
.
(2.133)
Тогда передаточная функция замкнутой системы относительно ошибки по задающему воздействию (2.126) принимает вид
![]() .
(2.134)
.
(2.134)
Передаточная
функция прямой цепи от точки приложения
возмущения
![]() до ошибки регулирования
до ошибки регулирования![]() (составляющая формулы (2.127)):
(составляющая формулы (2.127)):
![]() .
(2.135)
.
(2.135)
В результате передаточная функция замкнутой системы относительно ошибки по возмущающему воздействию (2.127) принимает вид
![]() .
(2.136)
.
(2.136)
Полученные четыре передаточные функции (2.130), (2.132), (2.134), (2.136) содержат всю информацию о качестве функционирования системы, например, изображение управляемой координаты определяется как
![]() ,
(2.137)
,
(2.137)
а ошибки регулирования
![]() .
(2.138)
.
(2.138)
Формулы (2.137) и (2.138) позволяют рассчитать переходные процессы в замкнутой САУ, определить время регулирования, перерегулирование и величину установившейся ошибки.
Запишем передаточную функцию прямой цепи (2.129) в виде
![]() .
(2.139)
.
(2.139)
Тогда передаточная функция замкнутой системы по управляющему воздействию (2.130)
![]() ,
(2.140)
,
(2.140)
где
![]() –характеристический
полином замкнутой САУ.
–характеристический
полином замкнутой САУ.
(2.141)
Передаточная функция замкнутой системы относительно ошибки по задающему воздействию (2.134) с учетом формулы (2.139) будет
![]() .
(2.142)
.
(2.142)