


ГЛАВА 12 ЛИНЕЙЧАТЫЕ ПОВЕРХНОСТИ
Способ образования поверхностей движением прямой линии ≈ Линейчатые поверхности с одной направляющей – торсовые поверхности ≈ Конические поверхности ≈ Цилиндрические поверхности ≈ Линейчатые поверхности с двумя направляющими и плоскостью параллелизма (поверхности Каталана) ≈ Цилиндроид ≈ Коноид ≈ Гиперболический
параболоид (косая плоскость)
1. СПОСОБ ОБРАЗОВАНИЯ ПОВЕРХНОСТЕЙ ДВИЖЕНИЕМ ПРЯМОЙ ЛИНИИ
Поверхность называется ЛИНЕЙЧАТОЙ, если она образована непрерывным перемещением прямой линии в пространстве по определенному закону. Таким законом может быть ее движение по некоторым направляющим линиям.
Из определения линейчатой поверхности следует, что ее образующая в каждый момент времени должна занимать строго определенное положение. Другими словами, число образующих должно составлять однопараметрическое множество ∞1.
Все множество прямых пространства четырехпараметрично – (∞4), так как прямая пространства определяется системой уравнений
y = k1x + b1,
z= k2x + b2,
вкоторой имеются четыре независимых параметра – коэффициенты k1, k2, b1, b2.

266 |
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНЖЕНЕРНОЙ ГРАФИКИ |
На рис. 1 показаны две проекции прямой l, заданной отрезком |АВ|. Уравнения этих проекций содержат по два коэффициента – k и b.
Рис. 1
Рассмотрим движение прямой, пересекающей одну или несколько кривых линий. Множество прямых, пересекающих одну кривую линию а, трехпараметрично и называется комплексом. Множество прямых, пересекающих две данные кривые a и b, двухпараметрическое и называется КОНГРУЭНЦИЕЙ. Следовательно, по индукции утверждаем, что множество прямых, пересекающих три данные кривые a, b, c, будет однопараметрическим, т. е. выделяет в пространстве линейчатую поверхность. Значит, для образования линейчатой поверхности необходимо иметь три направляющие линии. Но могут ли быть какие то исключения? Какие еще могут быть варианты однозначного выделения в пространстве линейчатой поверхности?
Вернемся к случаю с одной направляющей (рис. 2). (Заметили ли вы, что увеличение числа направляющих постепенно уменьшает «параметризацию» поверхности?)

Г л а в а 12. Линейчатые поверхности |
267 |
Рис. 2
Через любую точку кривой можно провести связку прямых линий, которые образуют двухпараметрическое множество, а вся кривая линия как направляющая определит трехпараметрическое множество прямых заполняющих все пространство. Никакая поверхность этими прямыми не выделяется, за исключением одного случая, а именно, когда только одна прямая линия (образующая) движется так, что все время касается направляющей линии. Такая образующая описывает линейчатую поверхность, которая называется ТОРСОВОЙ (о ней будет идти речь дальше).
Возьмем две направляющие кривые линии а и b (рис. 3). Отметим на кривой а некоторую точку А и примем ее за вершину конической поверхности α с
направляющей b. Задавая другое положение точки А – А1 и принимая ее также за вершину конической поверхности, получим при той же направляющей b отсек новой конической поверхности α1 . Таким образом, получается двухпа-
раметрическое множество прямых (конгруэнция). Эти прямые заполняют собой некоторый отсек пространства (тело конгруэнции) и не определяют собой поверхность.
Рис. 3

268 |
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНЖЕНЕРНОЙ ГРАФИКИ |
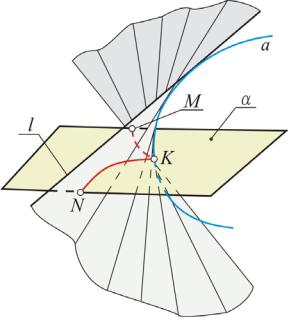
Возьмем три направляющие a, b и c (рис. 4). Выделим на направляющей а точку А, через которую проходит, по крайней мере, одна образующая, пересекающая две другие направляющие b и c. Точка А и направляющая b определяют коническую поверхность α, которую направляющая с может пересекать в
одной или нескольких точках (действительных, мнимых), – Сi. Прямые АСi, очевидно, пересекают направляющую b. Таким образом, при перемещении точки А по кривой а прямые АСi опишут линейчатую поверхность.
Рис. 4
Однако следует иметь в виду, что нельзя за направляющие брать три различные по форме и произвольно расположенные линии. Произвольно можно задавать только две направляющие, форму и положение третьей направляющей выбирают так, чтобы она находилась внутри конгруэнции прямых, определяемой двумя уже взятыми направляющими.
Наглядное изображение линейчатой поверхности с тремя направляющими показано на рис. 5. Такую поверхность называют косым цилиндром с тремя направляющими.
Итак, все многообразие линейчатых поверхностей может быть получено движением образующей либо по одной, либо по трем направляющим. При этом должны соблюдаться определенные условия. Например, при движении по одной направляющей таким условием является непрерывное касание образующей в каждой точке направляющей, а при движении по трем направляющем только две из них могут занимать произвольное положение. Кроме того,
Г л а в а 12. Линейчатые поверхности |
269 |
Рис. 5
третья направляющая может быть удалена в бесконечность и заменена так называемой плоскостью параллелизма.
Таким образом, все линейчатые поверхности можно разделить на три группы.
1.Линейчатые поверхности с одной направляющей.
2.Линейчатые поверхности с двумя направляющими и плоскостью параллелизма.
3.Линейчатые поверхности с тремя направляющими.
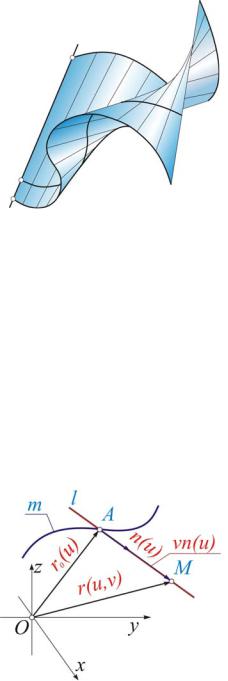
Линейчатая поверхность описывается уравнением
r = r(u, v) = r0(u) + vn(u),
где r0(u) – заданная точка на прямой с параметром u, а n(u) – направляющий вектор этой прямой (рис. 6).
Рис. 6
270 |
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНЖЕНЕРНОЙ ГРАФИКИ |
Параметр v дает расстояние между точками r(u, v) и r0(u).
На рис. 6 буквой m обозначена направляющая, буквой l – образующая. Вторая направляющая не показана.
2.ЛИНЕЙЧАТЫЕ ПОВЕРХНОСТИ
СОДНОЙ НАПРАВЛЯЮЩЕЙ – ТОРСОВЫЕ ПОВЕРХНОСТИ
Поверхность, образованная непрерывным перемещением касательной прямой к некоторой пространственной кривой линии, называется ТОРСОМ (рис. 7). Направляющая кривая торсовой поверхности называется РЕБРОМ ВОЗВРАТА, поэтому такую поверхность иногда называют поверхностью с ребром возврата.
Рис. 7
Ребро возврата представляет собой геометрическую часть определителя. Торсовую поверхность можно совместить с плоскостью без складок и разрывов, последовательно изгибая ее по образующим, и получить, таким образом, ее развертку. Торсовая поверхность состоит из двух полостей, границей кото-