


Г л а в а 10. Сложные поверхности |
233 |
6. КАСАТЕЛЬНЫЕ И НОРМАЛИ К ПОВЕРХНОСТИ ПРИ ОБРАБОТКЕ ЕЕ НА СТАНКАХ С ЧПУ
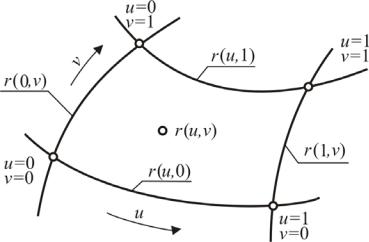
При работе станков с числовым программным управлением (ЧПУ) бывает необходимо вычислять смещения фрезы в трехмерном пространстве [10]. Для этого нужно найти нормаль к тому участку поверхности, который подлежит обработке. Поскольку при обработке поверхности r = r(u, v) фреза следует параметрическим кривым u = const и v = const, в некоторых приложениях большое значение имеют и касательные к этим кривым. Касательный вектор к параметрической кривой r = r(u, v0), где v0 – константа, кратен вектору ∂r/∂u . Подобным же образом касательный вектор к кривой r = r(u0, v) кратен вектору ∂r/∂v . Плоскость, касательная к этим кривым в точке их пересечения r = r(u0, v0), содержит оба указанных выше касательных вектора. Следовательно, нормаль к рассматриваемой поверхности в данной точке кратна векторному произведению этих векторов (рис. 10). Единичный нормальный вектор n определяется по формуле
∂r |
|
∂r |
|
|
∂r |
|
∂r |
|
||
|
|
|
|
|||||||
n = ± |
|
× |
|
|
|
|
× |
|
, |
|
∂u |
∂u |
∂v |
||||||||
|
|
∂v |
|
|
|
|
||||
где производные вычисляются в точке u = u0, v = v0. Ориентация вектора n выбирается в соответствии с рассматриваемым случаем.
Исключительные точки, в которых частные производные не существуют или в которых (∂r/∂u)×(∂r/∂v) = 0 , соответствуют либо особым точкам пара-
метризации, либо гребням или заострениям поверхности.
Предположим, что мы фрезеруем поверхность r = r(u, v) вдоль кривой u = u0 фрезой, имеющей сферический конец радиусом R (рис. 11). Тогда путь верхушки фрезы описывается соотношением
r = r(u0, v) + R(n – u),
где n – единичная нормаль в точке u = u0, а u – единичный вектор оси фрезы; r(u0, v) – точка касания, R(n – u) – смещение фрезы.

234 |
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНЖЕНЕРНОЙ ГРАФИКИ |
Рис. 10
Рис. 11
Ориентацию нормали к поверхности следует выбирать таким образом, чтобы вектор n был направлен наружу от обрабатываемой детали.
Г л а в а 10. Сложные поверхности |
235 |
7.ОБВОДЫ ПОВЕРХНОСТЕЙ
ИМЕТОДЫ ИХ ПРОЕКТИРОВАНИЯ
Если посмотреть на такие поверхности, как сфера, эллипсоид вращения, цилиндр или другие поверхности, определяемые уравнениями, то не возникает необходимости употреблять термин «обвод», так как мы имеем дело с цельной поверхностью. По определению профессора В.А. Осипова [17], обводом поверхности называется двумерный комплексный геометрический объект (КГО), составленный из определенных, отвечающих наперед заданным условиям кусков двумерных элементарных геометрических объектов (ЭГО), состыкованных между собой согласно заданным условиям. Куски двумерных ЭГО стыкуются между собой по одномерным ЭГО-линиям плоским или пространственным, вдоль которых необходимо выполнить ряд наперед заданных условий стыковки: порядок гладкости, порядок фиксации и другие дифференциально-геомет- рические характеристики.
Обводы поверхностей формируются двумя методами: каркасно-кусочным (лоскутным), известным под названием метод Кунса, и каркасно-кинематиче- ским. Методы реализуются средствами интерполяции и аппроксимации и отличаются методологией формирования математических моделей объектов.
7.1.КАРКАСНО-КУСОЧНЫЙ МЕТОД ПРОЕКТИРОВАНИЯ
Споявлением ЭВМ процесс проектирования кривых линий и поверхностей стал осуществляться быстрее и с более высокой степенью пространственной целостности, чем при использовании графических методов. Прежде для представления поверхности нужно было построить некоторое множество продольных гладких кривых, проводя их через точки, определяемые предварительно построенным набором поперечных сечений (плазовый метод). Во многих новых методах поперечные и продольные кривые играют одну и ту же роль, разбивая поверхность на некоторую совокупность криволинейных четырехугольных порций. Каждую из этих порций поверхности можно однозначно описать с помощью математической формулы. В 1967 г. Кунс предложил общую теорию построения порций поверхности. Он показал, как соединить четыре произвольные граничные кривые гладкой порцией поверхности и обеспечить непрерывность градиентов и кривизны между ее отдельными порциями.
На рис. 12 показана параметрически заданная порция поверхности, взятая из уже построенной каким-либо образом сетки кривых (см. рис. 6). Сетка кривых делит поверхность на совокупность топологически прямоугольных пор-
236 |
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНЖЕНЕРНОЙ ГРАФИКИ |
ций, каждая из которых ограничена парой u-кривых и парой v-кривых. Задача определения порции поверхности сводится к нахождению функции r(u, v) c подходящим типом «хорошего поведения», которая при u = 0, u = 1, v = 0 или v = 1 представляет нужную граничную кривую.
Рис. 12
Новые методы в отличие от старых, которые позволяли определять лишь систему линий, лежащих на проектируемой поверхности, но не саму поверхность, явились большим шагом вперед в области проектирования сложных поверхностей.
Большим достижением в области математики было также введение Безье (1971) системы UNISURF, полностью автоматизированной. С ее помощью оператор, не имеющий специальной математической подготовки, может легко проектировать отдельные участки кривых или поверхностей, пользуясь для этого только элементарными геометрическими понятиями. Эта система была первой практической системой проектирования поверхностей, когда проектировщик определяет незамкнутую ломаную, образованную прямолинейными отрезками, изображение которой выводится на дисплей. Система аппроксимирует эту ломаную гладкой кривой. Внося различные модификации в исходную ломаную, проектировщик может изменять аппроксимирующую кривую до тех пор, пока она не будет удовлетворять желаемым критериям. Подобным же образом проектируются и поверхности, но для этого предварительно строится незамкнутая полиэдральная поверхность. Современные компьютерные технологии в полной мере используют эти достижения.