

144 |
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНЖЕНЕРНОЙ ГРАФИКИ |
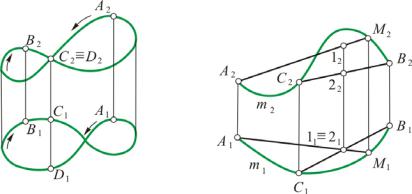
ции хотя бы одной точки на кривой (рис. 3). Действительно, если бы не были указаны проекции точки А, мы не могли бы построить горизонтальную проек-
цию В1 точки В по ее фронтальной проекции В2, так как не знали бы, на какой
ветви горизонтальной проекции находится В1. Наличие точки А позволяет, обходя кривую в выбранном направлении, однозначно строить проекции ее точек.
Рис. 3 |
Рис. 4 |
По чертежу кривой в общем случае нельзя сказать, пространственная это кривая или плоская. Надо выполнить дополнительные построения: провести на кривой две хорды и определить, пересекаются они или скрещиваются. В первом случае кривая плоская, во втором – пространственная. На рис. 4 изображена пространственная кривая
4. КАСАТЕЛЬНАЯ И НОРМАЛЬ К КРИВОЙ ЛИНИИ
Для исследования локальных свойств кривой строят в выбранной точке касательную и нормаль. Подробно это изучается в дифференциальной геометрии.
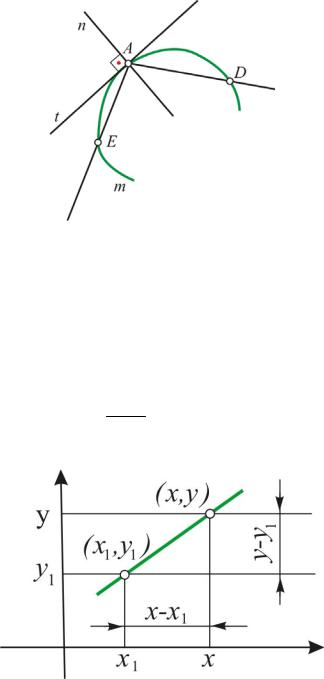
Пусть дана кривая m (рис. 5). Через точку А кривой проведем две секущие (хорды) АЕ и АD. Если приближать точки Е и D по кривой к точке А, то секущие будут поворачиваться вокруг нее и достигнут своего предельного положения. Предельное положение каждой секущей называется ПОЛУКАСАТЕЛЬНОЙ, а слившиеся вместе – КАСАТЕЛЬНОЙ. Нормалью n в точке А называется перпендикуляр, проведенный к касательной в этой точке.
Г л а в а 7. Кривые линии |
145 |
Рис. 5
5. УРАВНЕНИЯ КАСАТЕЛЬНОЙ И НОРМАЛИ
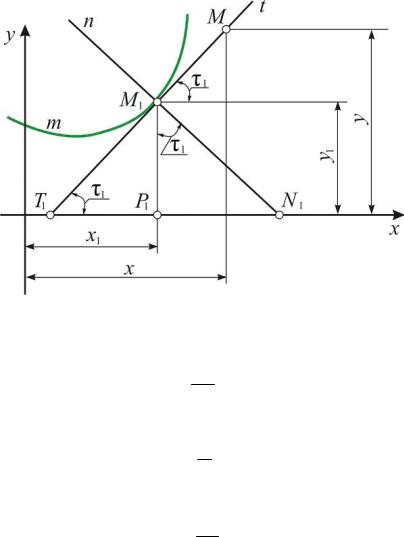
Уравнение прямой, проходящей через точку ( x1, y1 ) с угловым коэффициентом k (рис. 6):
y − y1 = k(x − x1);
y − y1 = k. x − x1
Рис. 6
146 |
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНЖЕНЕРНОЙ ГРАФИКИ |
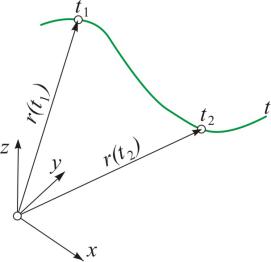
Если прямая t (рис. 7) является касательной к кривой m в точке M1 , то k должен быть равен tg τ наклона кривой в точке M1 . Обозначим его k1 , тогда
k |
= tg τ = |
|
dy |
|
x≡x1 |
= dy . |
|
|
|||||
1 |
1 |
|
dx |
|
y≡y |
dx |
|
|
|
|
|||
|
|
1 |
|
|||
Рис. 7
Поэтому для точки M1(x1, y1) уравнение касательной M1M :
y − y1 = dy1 (x − x1) . dx1
Известно, что тангенс угла наклона перпендикуляра к прямой равен обрат-
ной величине k1 со знаком минус: − 1 . Поэтому уравнение нормали в точ- k1
ке M1
y − y1 = − dx1 (x − x1) . dy1
Г л а в а 7. Кривые линии |
147 |
6. ВЕКТОР-ФУНКЦИЯ
Траектория движущейся точки определяется значениями радиуса-вектора, которые он принимает в последовательные моменты времени (рис. 8).
Рис. 8
Зависимость между r и t обозначим посредством функции
r = r(t) ,
т. е. фиксируем, что r является функцией от времени. Функция r называется вектор-функцией. Выраженное в координатной форме это утверждение имеет вид
x = x(t), y = y(t), z = z(t) .
Путь, пройденный точкой, может быть любой закрученной кривой в пространстве.
Кривую в пространстве можно задать еще и любой функциональной зависимостью между r и одним скаляром или параметром u, но наиболее наглядной является зависимость r от времени. Параметр служит меткой точки на рассматриваемой кривой, или просто ее координатой.