

Михайлов_Автоматика и автоматизация измерений
.pdfБЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматизации производственных процессов и электротехники
Курс лекций по предмету: « АВТОМАТИКА И АВТОМАТИЗАЦИЯ
ИЗМЕРЕНИЙ».
Для студентов специальности: «Физико-химические методы и приборы сертификации качества продукции»
Автордоцент Михайлов Валерий Борисович,
2009г.
1. Функции, выполняемые автоматическими СИ.
Функция измеряемого анализируемого параметра является основной, но не единственной функцией. Все измеряемые физика – химические параметры: температура, давление, влажность, кислотность и другие подлежат превращению в электрический сигнал. Затем этот сигнал сравнивают с эталоном. Результат сравнения оценивается оператором или автоматическим прибором. По величине отклонения судят о качестве измерения.
Автоматические приборы выполняют следующие операции:
-создание эталонного сигнала сравнения;
-хранение информации в памяти прибора;
-передача измеренной информации во внешнее устройство прибора с преобразованием в цифровую форму;
-создание и гибкое изменение оператором программы измерительного устройства;
-обработка результатов измерений в зависимости от вида погрешности и величины неопределенности (однократные или многократные измерения);
-представление измерительной информации в графической или табличной форме;
-самоконтроль за работой и правильностью измерительных операций отдельными элементами СИ;
-контроль за работоспособностью всего автоматизированного комплекса (встроенная система технической диагностики);
-корелляция характеристик измерительного прибора по результатам предыдущего пункта.
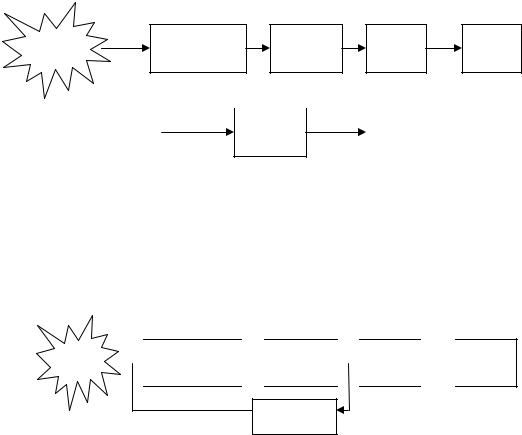
2.Обобщенная структурная схема процесса измерений.
Структурной схемой называют изображение функциональных особенностей прибора с помощью условно выделенных элементов схемы, выполняющие однородные функции: элементы преобразования физико-химических параметров в электрический сигнал, усилители электрических сигналов (первичные преобразователи), вторичные приборы и устройства, в которые включаются устройства индикации измерительных сигналов, устройства питания всех частей прибора, автоматические устройства, обеспечивающие логику работы прибора.
0 |
|
|
|
|
|
ИП |
|
|
|
_ВП__ |
|
|
|
|
ОУ |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
ПИП |
|
|
|
|
|
|
|
АЦГ |
|
|
|
|
|
|
||
Т, Р, W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
___ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
- датчик |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
- детектор |
|
|
|
|
|
|
|
|
|||||||
|
|
|
- измерит. элемент |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
УС |
|
|
|
|
|
ЗУ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УПП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МПУ__ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
УОИ |
|
|
|||||
|
|
|
|
|
|
|
|
ЭВМ |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПИП (первичный измерительный преобразователь) – чувствительный элемент (датчик, детектор) измерительного прибора, превращающий изменение физико-химического параметра образца в электрический сигнал.
ИП (измерительный преобразователь) – величины электрического сигнала (I, U, P) недостаточно для нормальной работы вторичного преобразователя, поэтому используют электронные усилители для обеспечения требуемого значения электрического параметра.
ВП (вторичный преобразователь) – устройство, предназначенное для индикации и выдачи информации об измеряемой величине в виде цифровой формы сигнала или величины отсчитанных делений по шкале прибора, т. е. в форме, доступной оператору, а также для выдачи сигнала в форме, предназначенной для дальнейшей обработки сигнала, хранения ее в электронной памяти. Большинство современных вторичных преобразователей имеют встроенные преобразователи из аналоговой формы в непрерывную цифровую. Они называются аналоговые цифровые преобразователи.
МПУ (микропроцессорное устройство) – устройство, предназначенное для обработки сигналов измерительной информации
(сравнения), запоминания результата, выдачи команд для повторных измерений и т. д.
УС (устройство сравнения) – отдельный либо встроенный в микропроцессор элемент, позволяющий реализовать различные методы измерения в автоматических приборах.
ЗУ (запоминающее устройство) – устройство, позволяющее набирать статистику.
УПП (устройство подготовки пробы) – устройство, позволяющее изменять и поддерживать на нужном уровне физико-химические параметры измеряемого образца.
УОИ – устройство отображения информации. ОУ – отсчетное устройство.
3. Методы измерений, используемые в автоматизированных приборах.
Измерение – это процесс, заключающийся в сравнении измеренной физ-кой величины с эталонной вел-ной, принятой за единицу.
В большинстве случаев используют 2 метода:
1.непосредственной оценки,
2.сравнения с мерой.
Метод непосредственной оценки – м-д измерений, в к-ром значение величины определяют непосредственно по отсчетному уст-ву измерного прибора прямого действия.
Прибор прямого действия – измер-ный прибор, в к-ром сигнал измерительной инф-ции движется в одном направлении, а именно с входа на выход.
Х У
М-д сравнения с мерой м-д измерения, в котором измеряемую величину сравнивают с величиной, воспроизводимой мерой. Методы сравнения в зависимости от результата подразделяют на:
-нулевой;
-дифференциальный.
Нулевой метод – метод сравнения с мерой, в котором подбирают такую меру, чтобы разность между измеряемой вел-ной и мерой была пренебрежимо мала.
Дифф-ный м-д – м-д сравнения с мерой, в к-ром на измер-ный прибор воздействует разность между измеряемой вел-ной и мерой.
Техническая реализация этих методов осуществляется 3-мя способами:
1.способ противопоставления,
2.способ замещения,
3.способ совпадения.
Способ противопоставления – способ сравнения с мерой, в котором измеряемая величина и величина, воспроизводимая мерой, воздействуют на прибор сравнения одновременно.
Способ замещения – способ сравнения с мерой, в котором измеряемая величина и величина, воспроизводимая мерой, воздействуют на прибор сравнения поочередно.
Способ совпадения – способ сравнения с мерой, при котором подбирают такое воздействие на прибор сравнения измеряемой величины и величины, воспроизводимой мерой, чтобы достичь их точного совпадения по величине (для периодических величин).
4. Классификация измерений.
Как правило, классифицируются по 5 пунктам:
1.в зависимости от временных характеристик измеряемых величин:
-статистические;
-динамические измерения.
2.по совокупности физических характеристик измеряемой величины:
-механические измерения;
-электрические приборы;
-тепловые приборы;
-оптические измерения.
3.по условиям, определяющим точность измерения:
-измерения с максимальной точностью (прецизионные измерения);
-контрольно-поверочные измерения;
-технические измерения.
4.по числу измерений величины:
-однократные;
-многократные измерения.
5.в зависимости, каким образом получили результат измерения:
-прямые;
-косвенные;
-совокупные измерения.
5. Погрешность измерений.
Погрешность – степень отличия измеряемого значения от истиной величины.
Точность измерения – это понятие свидетельствует в какой степени удалось уменьшить влияние погрешности и определить истинное значение величины.
На сегодняшний день параметр точности измерения определяют с помощью неопределенности по разработанной методике. Однако в паспортных приборах указываются еще и погрешности определяемые отдельно. Это абсолютные, относительные и приведенные
погрешности. |
|
Типы погрешности: |
|
1. абсолютная погрешность |
Х Х пр . Это модуль разности |
истинного измеренного значения величины. Истинное значение стремится к действительному значению, которое определяется физико-химическими методами и приведены в справочниках.
2. относительные погрешности – это отношение %, которая показывает, какая доля, приходится на 1-цу измеряемой величины.
 100%
100%
Х пр
Это позволяет сравнить измерения, проведенные в разное время.
3. Приведенная погрешность – какая доля приведенной погрешности
пригодится на нормирующие значения |
|
100% |
|
||
|
Х N |
|
ХN- это длины шкал, число делений шкалы измерений, разность между верхним и нижним диапазонам измерения.
4. Класс точности – отражает самую большую погрешность
выраженную в %; С |
100% |
max
X N max
5. Вариация показаний – это отношение разности прямого и обратного движения на нормирующую величину
W |
X |
пр |
Х обр |
*100% |
|
|
Х N |
||
|
|
|
|
Природа вариации показаний:
1.механические источники вариации. Если сущ. шестиренчато рычажная системы передач в приборах, наличие люфта между шестеренками приводит к появлению зазора.
2.электрическая природа:
6. Причины возникновения и методы устранения погрешности.
Причины возникновения погрешности в приборах:
1.погрешность метода измерений – это теоретическая погрешность, обусловленная несовершенством разрабатываемого метода, а также не достаточным изучением явления лежащие в основе изучения;
2.погрешность влияющих величин – могут влиять всевозможные факторы воздействующие на прибор (влажность, вибрация, температурные поля, электромагнитные излучения);
3.погрешность установки СИ;
4.измерение приборами имеющие искаженный класс точности.
Методы устранения погрешности:
1. Структурная схема любого прибора включает в себя следующие основные элементы:
Внешние помехи
|
|
ИП |
|
ВП |
|
ОУ |
ПИП |
|
|
|
|||
|
|
|
|
|
|
|
Внешние помехи Нужно устранить влияние чувствительного элемента на
измеряемые параметры или учитывать его проведение измерений.
2.Между элементами СИ существует взаимное влияние (помехи), природа которого может быть тепловой, электромагнитной.
3.Внешние помехи – на каждый элемент могут воздействовать всевозможные поля (статистические, динамические), что приводит к изменению погрешности.
Для устранения явлений используются:
- СИ с улучшенными метрологическими характеристиками; - устранение влияния внешних факторов;
- более глубокое изучение физ. явлений лежащих в условиях измерения;
- проведение измерений при разных положительных СИ.
7. СИ, их классификация. Структурные схемы СИ.
СИ- техническое устройство, служащее для определения размера физ. вел-ны и имеющее нормируемые метрологические характеристики.
Все СИ по их сложности подразделяются на 4 класса:
1.меры
2.измерительные устройства
3.измерительные установки
4.измерительные системы
МераСИ предназначенное для восприятия физ.вел. заданного размера.
Измерительное устройство- вид СИ который в зависимости от формы представления сигналов измеренной информации делится на:
-измерительный преобразователь и
-измерительный прибор.
Измерительный преобразователь- СИ предназначенное для выработки сигнала измеренной информации, в форме удобной для передачи, хранения, обработки данных, но не непредназначенное для воспроизведения оператором.
Измерительный прибор- СИ предназначенное для выработки сигнала измеренной информации, в форме доступной для непосредственного восприятия оператора (положение стрелки, цифры на табло).
Измерительная установка- совокупность функциональнообъединенных СИ, а также вспомогательных устройств, предназначенных для выработки сигнала в форме доступной оператору.
Измерительная система- совокупность СИ вспомогательных устройств соединенных между собой каналами связи и вырабатывающих измер. информацию во всех формах, которые будут располагаться на значительном удалении друг от друга.
Структурные схемы СИ.
Для удобства анализа работы СИ их рассматривают в виде структурных схем.
В зависимости от метода преобразования СИ делят на 2 класса:
1.прямого преобразования
2.компенсационного преобразования Структурная схема прямого преобразования. ПИПпервичный измерительный преобразователь ИПизмерительный преобразователь ВПвторичный преобразователь ОУотчѐтное устройство
УОПустройство обратного преобразователя
О |
1 |
ИП ВП ОУ |
ПИП |
Х
 Y
Y
Входное воздействие Х, выходное- Y.
Схема называется так потому что входной сигнал измерения проходит всѐ СИ.
В отличии от 1-ой схемы во 2-ой появляется дополнительное звено.
О  ПИП
ПИП  ИП
ИП  ВП
ВП  ОУ
ОУ
УОП
УОП предназначено для выработки сигнала сравнения меры в измерительном устройстве, что значительно повышает точность измерений.