

дулевич
.pdf
|
|
|
|
|
|
|
|
|
Таблица 6.6 |
|
|
Основные параметры шкивов поликлиновых передач |
|
||||||||
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
t |
f |
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
|
|
|
|
|
0 |
|
|
р |
|
|
|
|
|
|
|
|
h |
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
1 |
D |
|
|
||
|
|
|
|
|
h |
|
|
|
|
|
|
|
40º±0,5º |
|
r2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Сечение |
|
Размеры профиля канавок шкива, мм |
|
|
||||||
ремня |
t |
|
h0 |
h1 |
δ |
|
f |
|
r1 |
r2 |
К (J) |
2,40 ± 0,03 |
|
3,30 |
5,5 |
1,0 |
|
3,5 |
|
0,3 |
0,2 |
Л (L) |
4,80 ± 0,04 |
|
6,60 |
6,0 |
2,4 |
|
5,5 |
|
0,5 |
0,4 |
М |
9,50 ± 0,05 |
|
13,05 |
7,5 |
3,5 |
|
10,0 |
|
0,8 |
0,6 |
Таблица 6.7
Основные параметры шкивов зубчато-ременных передач с трапецеидальным зубом
tр
|
|
tш |
2φ |
|
Df |
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
hш |
Da |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sш |
|
|
|
|
|
|
|
|
|
|
|
|
|
m, |
tр, |
Размеры профиля межзубной впадины шкивов |
||||||
|
|
зубчато-ременных передач, мм |
|
|||||
мм |
мм |
|
|
|
||||
Sш |
|
hш |
H |
r1 |
r2 |
2φº |
||
|
|
|
||||||
1 |
2 |
3 |
|
4 |
5 |
6 |
7 |
8 |
1,0 |
3,14 |
1,00 ± 0,10 |
|
1,30 ± 0,10 |
0,6 |
0,30 ± 0,10 |
0,30 ± 0,10 |
50º±2 |
1,5 |
4,71 |
1,50 ± 0,15 |
|
1,80 ± 0,15 |
0,6 |
0,40 ± 0,10 |
0,40 ± 0,10 |
50º± 2 |
2,0 |
6,28 |
1,80 ± 0,15 |
|
2,20 ± 0,15 |
0,6 |
0,50 ± 0,10 |
0,50 ± 0,10 |
50º± 2 |
|
|
|
|
|
|
|
|
|
3,0 |
9,42 |
3,20 ± 0,20 |
|
3,00 ± 0,20 |
0,6 |
0,70 ± 0,10 |
1,00 ± 0,10 |
40º± 2 |
4,0 |
12,56 |
4,00 ± 0,20 |
|
4,00 ± 0,20 |
0,8 |
1,00 ± 0,15 |
1,30 ± 0,15 |
40º± 2 |
|
|
|
|
|
|
|
|
103 |
Окончание табл. 6.7
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
5,0 |
15,71 |
4,80 ± 0,20 |
5,00 ± 0,20 |
0,8 |
1,50 ± 0,15 |
2,00 ± 0,15 |
40º± 2 |
7,0 |
21,98 |
7,50 ± 0,30 |
8,50 ± 0,30 |
0,8 |
2,50 ± 0,20 |
3,00 ± 0,20 |
40º± 2 |
10,0 |
31,42 |
11,50 ± 0,30 |
12,50 ± 0,03 |
0,8 |
3,00 ± 0,30 |
3,50 ± 0,30 |
40º± 2 |
|
|
|
|
|
|
Таблица 6.8 |
|
|
Значение вспомогательного коэффициента k |
|
|
||||
|
|
|
|
|
|
|
|
D, мм |
До 50 |
До 78 |
До 118 |
До 198 |
До 318 |
|
До 500 |
k, мм |
0,08 |
0,10 |
0,12 |
0,13 |
0,15 |
|
0,18 |
Шероховатость поверхностей межзубной впадины составляет:
−вершин зубьев шкива – Ra = 2,5 мм;
−впадин зубьев шкива – Ra = 3,2 мм;
–боковых поверхностей межзубной впадины шкива – Ra = 1,0 мм. Требования отклонения формы и расположения поверхностей
представлены в табл. 6.9.
|
|
|
|
|
|
|
Таблица 6.9 |
|
Допуски формы и расположения поверхностей межзубной впадины, мкм |
||||||||
|
|
|
|
|
|
|
|
|
Параметр |
|
Делительный диаметр шкива D, мм |
||||||
|
50–80 |
80–125 |
125–200 |
200–315 |
315–500 |
|||
|
|
|
||||||
Отклонение |
диаметра |
|
|
|
|
|
|
|
вершин зубьев |
|
|
–60 |
–70 |
–80 |
–90 |
|
–120 |
Радиальное биение диаметра |
50 |
50 |
65 |
65 |
|
80 |
||
вершин |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Отклонение шага зубьев |
|
|
|
|
|
|
||
для m ≤ 2 мм |
|
±21 |
±22 |
±22 |
±22 |
|
±24 |
|
для m ≤ 4 мм |
|
±23 |
±23 |
±25 |
±25 |
|
±27 |
|
для m ≤ 10 мм |
|
±30 |
±30 |
±30 |
±30 |
|
±32 |
|
Накопленная |
ошибка |
шага |
|
|
|
|
|
|
зубьев |
|
|
56 |
67 |
80 |
95 |
|
110 |
Для предотвращения осевого сползания ремня шкивы изготавливают с ребордами (рис. 6.4). При межосевом расстоянии aпр > 8D1 и U < 3 оба шкива выполняют с ребордами высотой a = m (для m ≤ 7 мм) и a = 8 мм (для m > 7 мм). При меньших значениях aпр реборды выполняют на одном из шкивов, чаще меньшего диаметра.
104
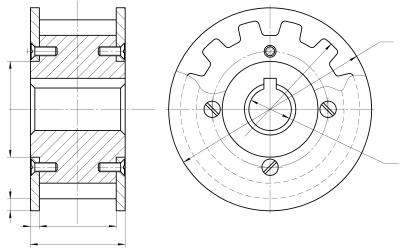
Dр
D0
dст
dв
a
Bш
Bр
Рис. 6.4. Конструкция шкива зубчато-ременной передачи с ребордами
Приведенными рекомендациями необходимо руководствоваться не только для выбора той или иной конструкции шкивов ременных передач, но и для грамотного выполнения рабочих чертей шкивов. При этом необходимо обратить внимание, что некоторые геометрические параметры шкивов (клиноременных, поликлиноременных и зубчато-ременных) несколько отличаются от параметров соответствующих ремней.
105

7.ВАРИАТОРЫ С ГИБКОЙ СВЯЗЬЮ
7.1.Общие сведения
Вряде случаев для осуществления технологического процесса
сцелью его автоматизации и повышения производительности необходимо плавно (бесступенчато) регулировать угловую скорость рабочего органа машины при работе с постоянной скоростью ведущего вала. Эта задача легко решается в приводах с помощью применения вариаторов.
Главной характеристикой вариатора является диапазон
регулирования, равный отношению максимальной ω2max и минимальной ω2min угловых скоростей ведомого вала, или отношению передаточных чисел Umax, Umin или отношению радиусов на ведомом
звене R2max, R2min:
|
D = |
ω2 max |
= |
Umax |
|
= |
R2 max |
, |
(7.1) |
|||||||
|
ω |
|
|
|
|
|||||||||||
|
|
|
2 min |
|
U |
min |
|
R |
|
|||||||
|
|
|
|
|
|
|
|
|
2 min |
|
||||||
где U |
max |
= |
|
|
ω1 |
и U |
min |
= |
|
ω1 |
. |
|
||||
|
|
|
|
|
||||||||||||
|
|
|
ω2 min |
|
|
|
|
|
ω2 max |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Практически для одноступенчатых вариаторов D ≈ 2,5–8,0. Вариаторы подбираются по каталогам или справочникам в
зависимости от передаваемого крутящего момента, диапазона регулирования и угловой скорости ведущего вала.
Существует множество конструкций вариаторов, однако все они могут быть разделены на две группы: с непосредственным контактом рабочих поверхностей тел качения (рис. 7.1–7.3) и с использованием промежуточного элемента 3 (рис. 7.4–7.7).
R1const
|
1 |
|
|
ω1const |
|
R2var |
2 |
ω1const |
|
ω2var
R1const
1
2var |
|
R |
ω2var |
|
2
Рис. 7.1. Схема лобового вариатора: |
Рис. 7.2.Схема конусного вариатора: |
106

1 – ролик; 2 – диск |
1 – ведущий конус; 2 – ведомый конус |
В первой группе регулирование передаточного числа происходит за счетотносительного перемещения ведущего или ведомогоэлемента. Диапазон регулирования в этих вариаторах не превышает D = 2,5–3,0, в противном случаевозрастаетгеометрическоескольжениеиувеличиваетсяизносдеталей.
F
R2var R1const
1 |
|
3 |
F |
1var |
2var |
|
R |
|
ω1const |
R |
|
|
|
|
ω2var |
ω1const |
ω2var |
2 |
1 |
2 |
|
|
Рис. 7.3. Схема многодискового вариатора: |
Рис. 7.4. Схема торового вариатора: |
1 – отбуртованные диски; 2 – конические |
1 – ведущая чашка; 2 – ведомая чашка; |
диски |
3 – промежуточный ролик |
Вариаторы второй группы могут иметь больший диапазон регулирования за счет одновременного изменения радиусов контакта ведущего и ведомого тел с помощью прижимного элемента, в качестве которого может быть использован стальной или пластмассовый ролик (рис. 7.4, 7.5), кольцо (рис. 7.6), ремень или специальная цепь (рис. 7.7). Прижатие фрикционных или промежуточных тел друг к другу может быть осуществлено либо предварительным прижатием (упругим деформированием пружины или грузом), либо автоматически за счет специальных прижимных устройств.
|
1 |
1var |
ω1const |
|
|
R |
3 |
2var |
ω2var |
|
R
2
Рис. 7.5. Схема конусного вариатора с цилиндрическм промежуточным элементом: 1 – ведущий конус; 2 –
|
3 |
1var |
1 |
|
|
R |
ω1const |
|
|
|
2 |
2var |
ω2var |
R |
|
Рис. 7.6. Схема конусного вариатора с кольцом: 1 – ведущий конус; 2 – ведомый конус; 3 – кольцо
107

ведомый конус; 3 – цилиндрический ролик
Наиболее широкое применение нашли вариаторы с раздвижными конусными шкивами (рис. 7.7). Основными преимуществами такого вариатора является простота конструкции и эксплуатации, значительно меньшие требования к точности изготовления и монтажу. К недостаткам можно отнести: значительные габариты, несколько меньший диапазон регулирования и невысокие угловые скорости. Работа таких вариаторов осуществляется по четырем схемам:
I – вариатор с регулированием диаметра ведомых шкивов при постоянном диаметре ведущих шкивов (рис. 7.8, а);
II – вариатор с регулированием диаметра ведущих шкивов при постоянном диаметре ведомых шкивов (рис. 7.8, б);
III – вариатор при симметричном регулировании обоих шкивов. Насколько раздвигается одна пара конусов, настолько сближается
другая пара конусов (рис. 7.8, в); |
|
IV – вариатор при несимметричном |
регулировании обоих |
шкивов (рис. 7.8, г). |
|
ω1const |
ω2var |
R1var |
R2var |
1 |
3 |
2 |
|
Рис. 7.7. Схема вариатора с раздвижными конусами:
1 – ведущие раздвижные конусы; 2 – ведомые раздвижные конусы; 3 – гибкий орган (ремень)
Изменение передаточного отношения достигается изменением диаметра одного из шкивов, либо одновременным изменением расчетных диаметров ведущего D1 и ведомого D2 шкивов, что осуществляется за счет сближения и раздвижения конусов (рис. 7.9).
108

При минимальном или максимальном передаточном отношении ремень на конусах располагается в крайних положениях.
n1
n2
а
n1
n2
б
n1 |
n1 |
n2 |
n2 |
|
в г
Рис. 7.8. Схемы регулирования натяжения ремня: а – схема I; б – схема II; в – схема III; г – схема IV
Рис. 7.9. Геометрические соотношения в клиноременном вариаторе
109

Ширину ремня у верхнего основания b0, мм, рассчитывают по формуле
b0 = (D1max − D1min + 2h)tg(0,5ϕ) + , |
(7.2) |
где D1max, D1min – минимальный и максимально возможный диаметр расположения ремня на шкиве, мм; h – толщина (высота) сечения
ремня, мм; φ – угол профиля шкивов, град.; ∆ – |
зазор между конусами |
|||
в крайнем сдвинутом положении, мм. |
|
|||
Расчетную ширину ремня bр, мм, находят из следующего |
||||
выражения: |
|
|
|
|
b |
= b − 2 |
h |
tg(0,5ϕ). |
(7.3) |
|
||||
р |
0 |
2 |
|
|
|
|
|
|
|
Если в уравнение (7.3) подставить значение (7.2), то получим |
||||
bр = (D1max − D1min + h)tg(0,5ϕ)+ . |
(7.4) |
|||
Стандартные размеры сечения ремня в свободном состоянии приведены в табл. 7.1, а под напряжением в канавке –
в
табл. 7.2.
Таблица 7.1
Размеры сечений вариаторных ремней в свободном состоянии
b0


 h
h
ϕ
Угол φ = 34о ± 1о Предельное отклонение на ширину одного ремня не более ±0,5 мм.
Ремни промышленных установок
Обозначение |
Ширина |
Толщина |
сечения |
b0, мм |
h, мм |
1– В20 |
22,0 |
6,5 |
|
|
|
1– В25 |
27,0 |
8,0 |
|
|
|
1– В32 |
34,0 |
10,0 |
|
|
|
1– В40 |
43,0 |
13,0 |
|
|
|
Ремни транспортных машин
Обозначение |
Ширина |
Толщина |
сечения |
b0, мм |
h, мм |
СВ–25 |
25,0 |
12,5 |
|
|
|
СВ–32 |
32,0 |
15,0 |
|
|
|
СВ–38 |
38,0 |
17,0 |
|
|
|
СВ–45 |
45,0 |
20,0 |
|
|
|
110

1– В50 |
53,0 |
16,0 |
СВ–50 |
50,0 |
22,0 |
|
|
|
|
|
|
1– В63 |
67,0 |
20,0 |
СВ–63 |
63,0 |
28,0 |
|
|
|
|
|
|
1– В80 |
85,0 |
25,0 |
|
|
|
|
|
|
|
|
|
Таблица 7.2
Номинальные размеры сечений вариаторных ремней, измеряемые под натяжением в канавке шкива
bр
ϕ
hр
h
bр – расчетная ширина ремня, расположенного в канавке шкива;
hр – расстояние от большего основания ремня до расчетной ширины (определяет расчетные параметры передачи); φ = 26º – угол клина измерительного шкива;
h – высота ремня, указанная в табл. 7.9.
Ремни промышленных установок
Обозначение |
bр, мм |
hр, мм |
сечения |
|
|
1– В20 |
20,0 |
1,7 |
|
|
|
1– В25 |
25,0 |
2,0 |
|
|
|
1– В32 |
32,0 |
2,5 |
|
|
|
1– В40 |
40,0 |
3,2 |
1– В50 |
50,0 |
4,0 |
|
|
|
1– В63 |
63,0 |
5,0 |
|
|
|
1– В80 |
80,0 |
6,3 |
|
|
|
Ремни транспортных машин
Обозначение |
bр, мм |
hр, мм |
сечения |
|
|
СВ–25 |
23,0 |
3,8 |
|
|
|
СВ–32 |
29,0 |
4,8 |
|
|
|
СВ–38 |
35,0 |
5,7 |
|
|
|
СВ–45 |
41,0 |
6,6 |
СВ–50 |
45,0 |
7,6 |
|
|
|
СВ–63 |
57,0 |
8,7 |
|
|
|
|
|
|
Приняв зазор между конусами в крайнем сдвинутом положении
|
|
|
|
|
|
bр |
= γ и |
|
D |
= ξ , |
|
|
|
|
|
|
|
∆ = 0,05bр |
|
и |
обозначив |
|
|
|
|
1min |
получим |
|
для |
||||||
|
h |
|
h |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
симметричного |
регулирования (рис. |
7.8, в) |
при |
D |
= D |
|
|
|
|
||||||||
|
|
Д |
|||||||||||||||
значение диапазона регулирования: |
|
|
|
max |
min |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
0,95γctg(0,5ϕ)−1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
||||
Д = |
|
|
|
|
+ 1 . |
|
|
|
|
|
(7.5) |
||||||
|
ξ |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
111 |
||
В случае, когда раздвижной только один шкив (рис. 7.8, а, б), формула выглядит следующим образом:
Д = |
0,95γctg(0,5ϕ) − 1 |
+ 1. |
(7.6) |
|
ξ |
||||
|
|
|
Для определения длины ремня необходимо задаться межосевым расстоянием. В ременных вариаторах принимают
a = (0,6 − 0,9)(Dmax + Dmin ). |
(7.7) |
Геометрическая длина ремня вариаторов L с гибкой связью определяется так же, как и в ременных передачах:
L = 2a + π(D2 х + D1х ) + (D2 х − D1х )2 . |
|
(7.8) |
|||
|
2 |
4a |
|
|
|
Выражая текущие значения диаметров через средний диаметр, |
|||||
D2 х |
= Dср + D2 , D1х |
= Dср − D1, |
|
|
(7.9) |
где D1, |
D1 – радиальные перемещения ремня на шкивах, |
|
|||
получаем |
|
|
|
|
|
L = |
2a + 0,5π[2Dср + ( |
D2 − D1 )]+ |
( D2 + |
D1 )2 |
(7.10) |
4a |
. |
||||
|
|
|
|
|
|
Округляем длину ремня до стандартной в большую сторону по
ГОСТ 26379–84 ( табл. 7.3).
Обозначая длину ремня при передаточном числе равной 1:
LU=1 = 2a + πDср,
получаем |
|
|
|
|
|
|
|
L = L |
|
+ π( |
D2 − |
D1 ) + ( D2 + D1 )2 . |
(7.11) |
||
U =1 |
|
2 |
|
4a |
|
||
|
|
|
|
|
|||
Перемещение конусов (рис. 7.9): |
|
||||||
при раздвижении |
|
x1 = 0,5 |
D1tg(0,5ϕ); |
(7.12) |
|||
при сближении |
|
x2 = 0,5 |
D2tg(0,5ϕ). |
(7.13) |
|||
Если |
|x1| = |x2| |
и, |
соответственно, ∆D1 = ∆D2, |
то из |
|||
выражения (7.11) |
следует, |
что геометрическая длина ремня при |
|||||
|
|
|
|
|
|
|
112 |