19.Силовой расчет ведущего звена. Обоснование метода «рычага» Жуковского.
Ведущее звено не является статически определимой системой. Она обладает подвижностью. Для ведущего звена можно составить 3 уравнения.
Чтобы их сделать определенной, надо, чтобы была еще одна неизвестная величина. В качестве неопределенной силы, берется такая сила, которую нужно приложить к ведущему звену.
Приложение и направление задаем, а величину определяем.
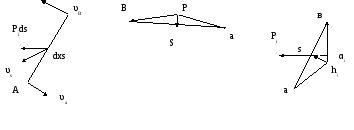
После нахождения Ру. Ру может быть определена методом «рычага» Жуковского, который гласит: если на какую-либо механическую систему действуют силы, то, прибавляя к задаваемым силам силы инерции и давая всей системе возможные для данного её положения перемещения, получаем ряд элементарных работ, сумма которых должна равняться нулю.
![]() - проекция возможных
перемещений на направление действия
сил.
- проекция возможных
перемещений на направление действия
сил.
В механизмах
движение не зависит от времени,![]() возможное перемещение является
действующим перемещением.
возможное перемещение является
действующим перемещением.
![]()
Заменим элементарную работу i-ой силы действующей на i-звено, через элементарный момент этой силы, определяемой относительно полюса повернуть план скоростей.
Т.о. элементарные работы, получаемые от возможных перемещений действующих на звенья преобразуются в элементарные работы.
По Жуковскому:
![]()
![]()
![]()
Чтобы определить уравновешивающую силу с помощью «рычага» Жуковского, надо к повернутому плану скоростей для данного механизма приложить к соответствующей точке приложения силы, действующие на звенья механизма, не меняя их направления, составить сумму элементарных моментов для всех сил относительно полюса скоростей и приравнять её к нулю.
![]()
20.Задачи динамического исследования. Режимы движения механизмов. Уравнение энергетического баланса.
Задачами динамики являются изучение режимов движения механизма под действием заданных сил и выявление способов, обеспечивающих заданный требуемый режим движения.
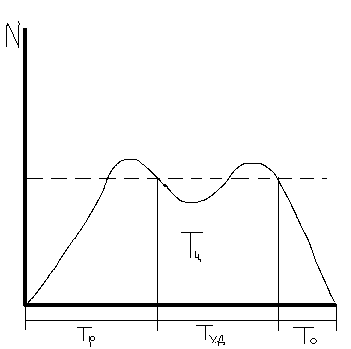
Движение всех звеньев механизма задает ведущее звено. Движение ведущего звена задается, но обратное воздействие ведомых звеньев влияет на само движение ведущего звена в результате, действие ведущего звена может отличаться от заданного требуемого движения. Но полное время работы механизма определяется временем работы ведущего звена от начала движения до момента остановки. Оно складывается:
![]()
![]() - полное время;
- полное время;
![]() - время разбега;
- время разбега;
![]() - время установившегося
движения;
- время установившегося
движения;
![]() - время остановки.
- время остановки.
![]()
![]()
![]() - работа всех
движущихся сил.
- работа всех
движущихся сил.
![]() - работа всех сил
сопротивления.
- работа всех сил
сопротивления.
![]() - работа сил инерции.
- работа сил инерции.
 :
:
 :
:
 :
:
Движение механизма может быть:
- периодическим – движение механизма, при котором положение скорости и ускорения за определенный промежуток времени становится таким, каким были в начале движения.
- циклом – периодическое движение от средней скорости ведущего звена до следующего движения такой же скорости ведущего звена.
- апериодическое
![]()
![]()
![]() - работа
производственных сопротивлений.
- работа
производственных сопротивлений.
![]() - работа сил трения
- работа сил трения
![]() :
:![]()
за
![]() :
:![]() уравнение мощности.
уравнение мощности.
![]() - уравнение
энергетического баланса.
- уравнение
энергетического баланса.
21.Коэффициент полезного действия. Определение кпд в последовательном соединении механизмов.
Механическое КПД – отношение абсолютной величины работы производственных сил к работе всех движущихся сил за время установившегося движения.
![]()
![]() - работа
производственных сил сопротивления.
- работа
производственных сил сопротивления.
![]() - работа всех
движущих сил.
- работа всех
движущих сил.
![]() - работа сил трения.
- работа сил трения.
![]() - коэффициент
потерь – показывает, какая часть движущих
сил расходуется на преодоление сил
сопротивления.
- коэффициент
потерь – показывает, какая часть движущих
сил расходуется на преодоление сил
сопротивления.
![]()
![]()
КПД при последовательном соединении механизмов
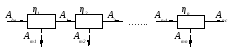
![]()
![]()
Перемножим левые и правые части:
![]()
![]()
Общий механический коэффициент полезного действия последовательно соединенных механизмов равняется произведению механических коэффициентов полезного действия отдельных механизмов, составляющих одну общую систему.