

5.Основной принцип образования механизмов. Заменяющие механизмы.
Ассур А.В. 1914 г. Сформулировал принцип образования механизмов:
Любой механизм может быть образован путем наслоения групп звеньев с нулевой степенью подвижности.
Порядок наслоения:
Первая такая группа присоединяется к ведущему звену (звеньям) и к стойке.
Вторая группа присоединяется к звеньям первой группы и к стойке.
Третья группа присоединяется к звеньям второй группы и к стойке и т.д.
Такие группы с нулевой степенью подвижности наз-ся структурными группами Ассура.
Для исследования механизма удобно все пары 4 класса и ниже заменять парами 5 класса. Если в схеме механизма имеется пара 4 класса, то такой мех-м называется основным, а после замены пар 4 класса парами 5 класса, получается заменяющая схема мех-ма эквивалентная основной схеме.
Принцип замены:
Каждая пара 4 класса заменяется : 1) 2-мя парами 5 класса + одно звено заменяющие эти пары
2) каждая пара 5 класса располагается в центре кривизны элементов пары 4 класса.
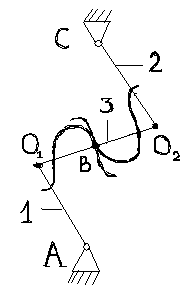

B(1,2) 4 класса
1,2,3 (А,01,02, С)
6.Классификация структурных групп.
Группы Асура – структурные группы с нулевой степенью подвижности W = 0.
Схема любого механизма может быть составлена последовательным присоединением к начальному звену групп звеньев с нулевой степенью подвижности. Группы звеньев присоединяются между собой только парами 5-го класса (одна степень подвижности). Если есть пары 4-го класса, то их надо заменить парами 5-го класса. Начальное (входное) звено, соединённое кинематической парой со стойкой, называется механизмом 1-го класса.
Механизмы 1-го класса.

n = 1 ; p4 = 0 ; p5 = 1 ; W = 3n – 2p5 = 3 ∙ 1 – 2 ∙ 1 = 1.
Добавим к входному звену группу с нулевой степенью подвижности:
W = 3 ∙ 2 – 2 ∙ 3 = 0.
= 3 ∙ 2 – 2 ∙ 3 = 0.
Входное звено:

W = 3 ∙ 3 – 2 ∙ 4 = 1.
W
= 3n
– 2p5
= 0 → n
=
![]() p5
→ p5
=
p5
→ p5
=
![]() n.
n.
Так как число звеньев и кинематических пар может быть только целым, то
|
Число звеньев |
2 |
4 |
6 |
8 |
10 |
… |
|
Число кинематических пар |
3 |
6 |
9 |
12 |
15 |
… |
|
|
II кл 2 порядка |
III кл 3 пор |
VI кл 4 пор |
V кл 5 пор |
IV кл 6 пор |
… |
Группа, имеющая 2 звена и 3 кинематические пары, называется группой 2-го класса 2-го порядка и т. д. Эти формулировки позволяют системно подходить к проектированию.
Примеры структурных групп 2-го класса.





Примеры структурных групп 3-го класса, 3 порядка:
n =4
=4
P5=6
Структурные группы 4 класса, 2 порядка
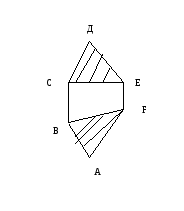
n = 4
P5 = 6
7. Метод определения класса механизмов.
Класс механизма определяется по классу тех структурных групп образующие его схему, а именно: класс мех-ма определяется по старшему классу структурной группы входящей в его схему, независимо от их количества. Для того чтобы определить класс мех-ма необходимо: 1. Подсчитать степень подвижности
2. Исключить пассивные и активные звенья
3. Указать ведущее звено (звенья)
4. Разложить схему мех-ма на структурные группы указав их классы
5. Записать класс механизма по старшей структурной группе которая входит в его схему.