

8.Аналитический метод исследования кинематики механизмов.
Задача кинематики – при заданном движении ведущего звена определять перемещение скорости и ускорения всех звеньев механизма за весь период его работы.
Для исследования мех-мов необходимо знать их классы.
Для сложных мех-мов он практически не может быть применен. Выполняется для простых мех-ов следующим образом:
Составляется система координат с началом совпадающим с осью вращения ведущего звена и относительно этой системы получаем аналитические выражения по которым определятся положение других звеньев.
Пример:
 Звено АВ-кривошип
Звено АВ-кривошип
В – ползун
СВ – кулиса


9. Графический метод определения кинематических параметров. План скоростей.
Для того чтобы исследовать мех-м графически необходимо изобразить его схему в выбранном масштабе, задать начальное положение ведущего звена, определить методом засечек положение остальных звеньев затем задавая ряд положении ведущего звена и методом засечек определить положение других звеньев до полного оборота ведущего звена.
План скоростей:
План скоростей представляет собой графическое изображение скоростей всех звеньев механизма в заданном его положении и в выбранном масштабе. План скоростей позволяет исследовать скорости мех-мов с неограниченным числом звеньев.
Любое движение плоского звена может быть составлено из переносно поступательного движения этой фигуры вместе с произвольно выбранной точкой и относительно вращения фигуры вокруг этой точки

![]()
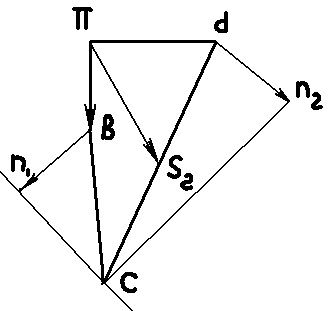
Рассмотрим структурную группу состоящую из 2-х звеньев


![]()
Р- полюс – начало плана скоростей
Мы должны знать числовое значение скорости точки В. Переводим в масштаб.
Например:
![]() т.е. На чертеже Рв будет 100 мм.
т.е. На чертеже Рв будет 100 мм.
Для 9 вопроса

10. Порядок опр-я ускорений в многозвенных мех-ах. Т-ма подобия.
1) Определяется ускорение ведущего звена и в масштабе изображается на бумаге.
2) Составляется векторное уравнение для первой присоединенной к ведущему звену структурной группы и по этому уравнению строится план для звеньев этой структурной группы.
3) Составляется векторное уравнение для 2-ой структурной группы и строится план скоростей и ускорений и т.д. до конца.
Например:


![]()
методом плана
Выбираем
масштаб


Теорема подобия.
Концы абсолютных значений скоростей (ускорений) точек принадлежащих одному звену на плане скоростей (ускорений) образуют фигуру подобную и подобно расположенную одноименной фигуре на схеме механизма. Рис.есть!
11.Виды трения. Коэф-фициенты трения покоя.
При работе машин и механизмов происходит явление, которое сопроваждается рассеиваием механической энергии. Это явление называют трением.
Трение наряду с положительными св-ми необходимые для транспорта имеет отрицательные свойства – износ кинематических пар.
Различают внешнее и внутреннее.
Внешнее трение – сопротивление относительному перемещению, возникающее между 2-мя телами в зонах соприкосновения поверхностей по касательным к ним.
Внутреннее трение – процессы, происходящие в твердых, жидких и газообразных телах при их деформации и приводящие к необратимому рассеянию механической энергии.
Смазочный материал - материал, вводимый на поверхности трения для уменьшения силы трения и интенсивности изнашивания.
Существует 2 вида трения :
Трение без смазочного материала (сухое) и трение со смазочным материалом (жидкостное)
Различают следующие виды смазки: твердую, жидкостную, газовую, полужидкстную или полусухую.
Коэффициент трения называется отношения силы трения к нормальной составляющей реакций в заданный момент времени.
Коэффициент трения покоя:

FТР.П. = G ∙ sinα ;
FП. = G ∙ cosα ;
.
![]()
Равновесие будет иметь место, пока tgα ≤ tgφП .
Обозначим: tgφП = fП – коэффициент трения покоя;
φП – угол трения покоя.
Если соприкасающиеся тела находятся в относительном движении, то имеет место не трения покоя, а трение движения.
В отличие от силы трения покоя, сила трения движения производит определенную работу.
![]()
![]() N-нормальная
составляющая реакции.
N-нормальная
составляющая реакции.