

8.2 Слабонелинейные осцилляторы
Еспи связь между осцилляторами относительно велика, то она воздействует не только на фазы, но и на амплитуды. Вообще говоря, свойства сильных взаимодействий неуниверсальны, но в случае слабонелинейных автоколебательных систем можно использовать метод усреднения и получить универсальные уравнения, зависящие только от нескольких существенных параметров. Мы будем следовать подходу Aronson et al. [1990]. Так как метод усреднения был уже кратко изложен в разделе 7.2, то здесь мы просто модифицируем уравнения, чтобы учесть взаимную связь.
8.2.1 Общие уравнения
Возьмем два, в общем случае различных, осциллятора и свяжем их
НИИ МММ
iti + ш\хі = /i(.Ti,.ti) + Di(x2 - xi) + Bi(x2 - xi), (8.10) x2 + u\x2 = f2(x2,x2) + D2(xi - x2) + B2(xi - x2). (8.11)
Здесь со>і_2 - частоты линейных несвязанных систем. При интерпретации этих уравнений следует иметь ввиду:
(i) Мы рассматриваем линейную по переменным х.\}2, х.\}2 связь. Это оправдано, еспи автономные частоты u>i и ш2 близки, что соответствует резонансу 1:1. Действительно, в правой части
![]()
основными являются члены, имеющие частоты 0/1,2, а эти члены линейны. Если линейные члены отсутствуют, то необходимо рассмотреть члены высших порядков; синхронизация в этом случае будет слабее.
(ii) Члены, описывающие связь, выбраны пропорциональными разности переменных и их производных. Такая связь исчезает при совпадении состояний двух систем, ад = х2, х.\ = х2. [Aronson et al. 1990] называют такую связь «диффузионной». Другая возможность - это «непосредственная» связь, когда, например, уравнение (8.10) модифицируется в
'xi + ш\хі = fi(xi,ii) + Dix2 + Вхх2.
Различие между «непосредственной» и «диффузионной» связью станет важным при рассмотрении явления «вымирания колебаний» (гашения), в остальном же свойства синхронизации при двух типах связи близки.7
Как обычно в методе усреднения, мы ищем колебательное решение с общей (пока неизвестной) частотой о> и медленно меняющимися комплексными амплитудами А ii2. Используя подстановку
*i,2(f) = UAw(t)eiwt + с-с-)> ?Л,2(*) = %(iuAli2(t)eiwt + ее),
получим общие уравнения для медленно меняющихся комплексных амплитуд А\£ (СР- с уравнением (7.41))
Аі = -ІА1А1 + fnAi - (71 + іаі)|Лі|2Лі + (/¾ + іді)(А2 - Аі),
(8.12)
A2 = -iA2A2 + u2A2 - (72 + ia2)\A2\2A2 + (/¾ + id2)(Ai - A2). Расстройка может быть в первом приближении записана как Дуг = wi,2 — ол
Параметры связи /?і52 ? ^1,2 пропорциональны константам связи •Si,2,-Di,2- Другие параметры - №1,2, 7і,2, «1,2 _ те же самые, что и в уравнении (7.41). Вводя действительные амплитуду и фазу в
' В разделе 8.2.3 мы обсуждаем различие между описывающими связь членами, пропорциональными Ві,2 и 1)1,2.
![]()
кг = //,/,',(1 - 71 R\) + 0i(R2 cos(<62 - фг) - R{)-
— <>li?2 Sin((?)2 - Фі);
Фі = -Ai - HiaiRl + Si cos(02 - Фі) - +
(8.13)
-Ь/Зі ^ Sin(c?>2 - 01): Лі
Й2 = /х2Д2(1 - 72^1) + fo(Ri cos(0i - <fo) - Д2)--S2Ri зт(фі - ф2),
ф2 = ^Аг - jU2Ck2i?2 + d~2 |г COS(01 - ф2) - +
+/02^-Sin(^i - </>2). Л2
Примечательно, что члены, описывающие связь, зависят только от разности фаз, поэтому мы можем сократить число уравнений, введя разность фаз 'ф = ф2 — ф\. С этой переменной система (8.13) принимает вид
Ri = - 7ii?i) + 0i(R2 cos ф - Ri) - 6\R2 sin ф,
R2 = ii>ll>( 1 - j2R2) + 02(Ri cos ф - R2) + d2i?i sin ф,
(R R \
K\ K2 J
+ Si - S2- (Pij^ + ^2¾) sin^'-
Здесь v = ш2 — u>i - это расстройка автономных частот.
Приведенные уравнения достаточно общие, и анализ всех возмож- ных случаев весьма затруднителен. Мы можем уменьшить число параметров, предположив, что осцилляторы различаются только ли- нейными частотами, т.е. ці = [і2 = /л, и так далее. В дополнение, нормализуем время на ц и амплитуды на избавившись тем
самым от двух параметров. Тогда оставшиеся коэффициенты 0, 5 должны рассматриваться как нормализованные на /л, а а - как
![]()
нормализованный на 7//І. Тем не менее, для простоты мы будем использовать те же обозначения и перепишем систему в виде
/.', = /.',(1 - + £(i?2cos V - #i) - SR2siniK (8.14) R2 = 11,( 1 _ Rl) + 0(Rl cos 'ф - II,) + di?i sin V, (8.15)
ф = -„ + а(Н1-Щ)+б(-^ + ^С08ф-
~р{ж + %)8іпф- (8Л6)
Эти уравнения были детально исследованы Aronson et al. [1990]. Здесь мы не приводим все их результаты, а лишь обсуждаем наиболее важные физические эффекты.
Прежде чем продолжить, напомним физический смысл параметров в уравнениях (8.14)-(8.16). Параметр а описывает нелинейную зависимость частоты одиночного осциллятора; изохронные колебания соответствуют а = 0. Параметр v - это расстройка автономных частот; когда частоты совпадают, то v = 0. Параметры 6 и /3 - это константы связи, они будут обсуждены ниже.
Если осцилляторы изохронны (о = 0), то переход к синхронизации происходит через бифуркацию седло-узел, при которой возникает предельный цикл, аналогично сценарию, описанному в разделе 8.1. Для неизохронного случая а ф 0 наблюдается более сложная бифуркационная картина.
8.2.2 Вымирание (гашение) колебаний
Интересное явление - вымирание, или гашение, колебаний - наблюдается в случае диффузионной связи. Оно не имеет аналога в случае осциллятора под воздействием внешней силы или в случае непосредственной связи. При достаточно большой диффузионной связи /3 и расстройке v начало координат R\ = Л2 = 0 становится устойчивым и колебания в обеих системах вымирают из-за связи.
Продемонстрируем это, линеаризовав уравнения (8.12). Для простоты, возьмем все параметры (кроме частот) одинаковыми. Более того, предположим, что связь чисто диссипативная (см. обсуждение ниже), 5 = 0. Окончательно, вводя частоту ш = (u>i + 0/2)/2, запишем А| = ^Дг = А и получим
![]()
Аі = (іА + ц)Аі + Р(А2-Аі).. А2 = (-іА + ц)А2 + P(Ai - А2). Линейный анализ устойчивости дает собственные значения А = и — в ± \/д2 — А2.
Стационарное состояние А\ = А2 = О является, следовательно, устойчивым, если и < /3 < (и2 + А2)/2и. Физический смысл возникновения устойчивости за счет связи понятен: диффузионная связь вносит дополнительную диссипацию в каждую из систем, и эта диссипация не может быть скомпенсирована воздействием другого осциллятора, если расстройка велика.
8.2.3 Притягивающее и отталкивающее взаимодействие
Сведем систему (8.14)-(8.16) к одному уравнению для разности фаз. Мы можем сделать это при слабой связи, т.е. если параметры (3 и <5 могут считаться малыми. Конечно, мы можем получить это уравнение с помощью фазового приближения, как описано в разделе 8.1. но, поскольку у нас уже есть усредненные уравнения (8.14)-(8.16). то нам проще вывести фазовое уравнение непосредственно из них. В первом приближении амплитуды R\}2 мало отличаются от невозмущенных значений R\}2 = 1:
Rl,2 и 1 + nj2, rij2 -С 1.
Подстановка этого выражения в уравнения (8.14) и (8.15) дает в первом приближении
гі_2 = ^2ri_2 + [3(созф — 1) Т бзтф.
Видно, что возмущения амплитуды сильно демпфированы, поэтому мы можем принять гу^ и 0 и получить
/3 6 Ri}2 = 1 + ^-(cos ф — 1) =ғ - sin -ф.
Подставляя это в (8.16), получим
ф = ^и - 2(/3 + а8) sin ф. (8.17)
Это уравнение совпадает с уравнением (8.8) с константой связи е = -2(Р + а8).
![]()
Рассмотрим сначала идентичные осцилляторы, v = 0. Из уравнения (8.17) ясно, что устойчивое значение разности фаз между двумя осцилляторами зависит от знака коэффициента /3 + аб. Если он положителен, то устойчивая разность фаз равна 0, т.е. фазы притягиваются; если он отрицателен, то наблюдается отталкивающее взаимодействие и устойчивая разность фаз равна тт. Представляется важным обсудить физический смысл этих двух типов взаимодействия.
Прежде всего, будем различать диссипативную и реактивную связь. В системе (8.10) и (8.11) члены, пропорциональные Di^, -реактивные, а члены, пропорциональные Ві^, — диссипативные. Действительно, пренебрежем на время нелинейными и диссипативными членами (т.е. положим = 0) и рассмотрим линейные консервативные осцилляторы. Тогда эффект взаимодействия легко понять: описывающие связь члены, пропорциональные Di^, только сдвигают автономные частоты, в то время как члены, пропорциональные Ві^. вносят диссипацию.8 Эти эффекты проявляются и в нелинейном случае. В терминах, используемых [Aronson et al. 1990], два описывающих связь члена соответствуют скалярной (В) и нескалярной (D) связи. Чтобы объяснить происхождение этих понятий, перепишем уравнение (8.10) в виде системы двух уравнений первого порядка
х\ = уи
у\= - ш\хі + /і(жі,2/і) + Di(x2 - xi) + Bi(y2 - yi).
Мы видим, что члены, пропорциональные В\, описывают линейную связь по переменной у в уравнении для у, в то время как члены, пропорциональные Di, описывают линейную связь по переменной х в уравнении для у. В общем случае, когда уравнение колебательной системы записано в виде системы обыкновенных дифференциальных уравнений первого порядка, скалярные члены связывают одну и ту же переменную, а нескалярные - описывают перекрестную связь.
Физически, диссипативная связь, пропорциональная /3, стремится привести две взаимодействующие системы к более однородному режиму, при котором их состояния совпадают (конечно, если /3 > 0). В результате, такая связь непосредственно ведет к синфазной синхронизации осцилляторов в соответствии с уравнением (8.17). В противоположность этому, влияние реактивной связи a priori не ясно. Чтобы описать влияние различных типов связи на фазовую
8 Можно показать, что дивергенция фазового объема дается выражением — (Si + В2); ср. с [Schmidt and Chernikov 1999].
![]()
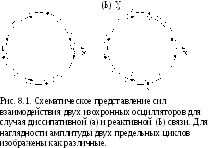
На рис. 8.1 мы иллюстрируем случай изохронных осцилляторов (а = 0). На схеме (а) показано взаимодействие за счет диссипативной (скалярной) связи: в уравнениях (8.10) и (8.11) отличны от нуля только коэффициенты В. Связь проявляется как сила, действующая в направлении у, и эта сила пропорциональна разности переменных у на предельных циклах. Таким образом, взаимодействие фаз - притя-
![]()
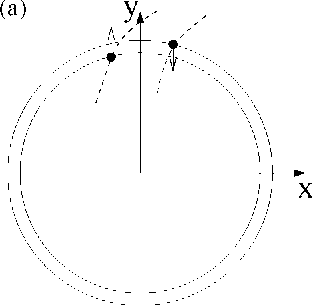
гивающее.9 Если фазы близки, то эта сила действует не весь период колебаний, а только когда переменные у отличаются существенно, т.е. когда х близко к минимуму или максимуму. На схеме (Ь) показан случай реактивной (нескалярной) связи, здесь мы предполагаем, что отсутствуют коэффициенты В. Теперь сила действует также в направлении у, но она пропорциональна разности переменных х. Следовательно, сила действует, когда х близко к нулю, и она не стремится ни сблизить фазы, ни удалить их друг от друга. Таким образом, реактивная связь меняет только амплитуды осцилляторов, а не их фазы. Фазы могут быть изменены только косвенно, если они зависят от амплитуд, т.е., если колебания неизохронны (в изохронном случае фазы не зависят от амплитуд; изохронами являются радиальные линии фазовой плоскости). Итак, реактивная связь не влияет на изохронные осцилляторы. Это соответствует тому, что коэффициент реактивной связи 6 появляется в уравнении (8.17) умноженным на параметр изохронности а.
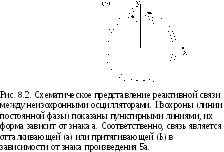
Ситуация меняется при реактивной связи между неизохронным осцилляторами, т.е., если а ф 0. Этот случай показан на рис. 8.2. Взаимодействие увеличивает амплитуду одного осциллятора и уменьшает амплитуду другого, и из-за неизохронности колебаний это приводит к появлению фазового сдвига, т.к. частота зависит от амплитуды. В зависимости от знака произведения аб взаимодействие может быть как притягивающим, так и отталкивающим. В результате, устойчивый фазовый сдвиг может быть между 0 и тт. Это следует также из (8.17). Тот же самый механизм вызывает фазовую неустойчивость в колебательной среде, что обсуждается позже в главе 11.
Сделаем одно замечание. Мы проиллюстрировали роль только основных членов в фазовой динамике. Если эти члены исчезают, то уравнение (8.17) перестает выполняться. Тогда, чтобы описать приводящее к синхронизации фазовое взаимодействие, необходимо учесть члены более высокого порядка.
8.3 Релаксационные колебания
Универсальной модели релаксационных колебаний не существует, поэтому мы хотим привести здесь только один пример: так назы-
9 Строго говоря, этот вывод верен только для слабонелинейных колебаний. В случае сильной нелинейности даже диффузионная связь переменных состояния может привести к отталкиванию фаз [Han et al. 1995, 1997: Postnov et al. 1999а].
ваемый осциллятор типа накопление - сброс. Он не задается системой дифференциальных уравнений: в нем отдельно описываются быстрые и медленные движения. Осциллятор характеризуется единственной переменной х, которая растет от 0 до 1 (состояние «накопление») в соответствии с заданным динамическим законом, который может быть описан обыкновенным дифференциальным уравнением или же функцией времени. Как только достигается порог х = 1, осциллятор мгновенно сбрасывается в х = 0 («стреляет»). Предполагается, что взаимодействие двух таких осцилляторов происходит только во время «сброса». Когда первый осциллятор х.\ стреляет, он действует на второй, увеличивая его переменную х2 на величину е. Если х2 + £ превышает порог (т.е. х2 + е > 1), второй осциллятор также стреляет, но при этом ответного воздействия на первый осциллятор не происходит (осциллятор в момент сброса не чувствителен к внешнему воздействию).
Динамика данного вида связи сильно диссипативна. Действительно, если фазы двух осцилляторов оказываются близки друг к другу, то осциллятор, который стреляет первым, заставляет стрелять и второй, так что они стреляют одновременно. Посте этого события фазы осцилляторов совпадают. Если автономные частоты осцилляторов близки, то они продолжают стрелять одновременно. Итак, будет наблюдаться идеальная синхронизация, при которой события «сброса» совпадают, и период будет наименьшим из двух автономных.
Перейдем к аналитическому рассмотрению проблемы, следуя подходу Миролло и Строгатца [Mirollo and Strogatz 1990Ь]. Предположим вначале, что осцилляторы идентичны и имеют автономную частоту uiq. Медленное движение определяется функцией х = /(</>), где ф - фаза, удовлетворяющая ф = ujq . Оно соответстует росту фазы от 0 до 27г, и при ф = 2тт происходит сброс.
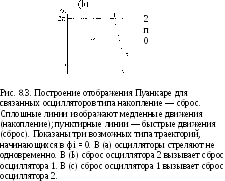
Два осциллятора описываются потоком на двумерном торе (рис. 8.3); это описание может быть сведено к одномерному отображению Пуанкаре. Выберем линию ф\ = 0 в качестве секущей; это означает, что мы наблюдаем за фазой второго осциллятора в тот момент времени, когда первый стреляет. Такое построение отображения Пуанкаре ф^ —>• Ғ(ф^) проиллюстрировано на рис. 8.3. Начнем с точки 0 с координатами ф\ = 0, ф2 = ф^ • На первой стадии медленного движения достигается точка 1 с ф^ = 2тт, ф^ = 2тт — ф^'. В этот момент осциллятор 2 стреляет, и фаза первого тоже изменяется. Еспи мы предположим, что переменная х меняется на е, то новая фаза первого осциллятора дается выражением ф^ = /~1(/(ф^)+е).
8.3 Релаксационные колебания ZO^jjj где /_1 есть функция, обратная /. Теперь возможны два ступая.
(2)
(з)
(3) (2)
27Г, <%= 2-7Г — </>]/, за которым следует сброс осциллятора 1.
При сбросе фаза ф2 изменяется, и, опять, либо вызывается сброс осциллятора 2 (рис. 8.3с), и фаза ф2 скапком изменяется до 27г,10 либо сброса не возникает, и конепная топка отображения Пуанкаре
есть ф^ = /_1(/(<^2^) + е); см- Рис- 8.3а.
Легко видеть, пто, в силу симметрии, отображение Пуанкаре ф\ = Ғ(ф®) может быть записано как двойная итерация отображения Һ:
Ғ(ф) = һ(һ(ф)), һ(ф) = r\f№ ~Ф) + e).
(8.18)
Это отображение Һ называется отображение сброса (firing map). Оконпательное отображение Пуанкаре имеет два плато, где Ғ{ф) = 0 или Ғ(ф) = 2тт, и гладкую область между ними, см. рис. 8.4. Гладкая область задается уравнением (8.18) и зависит от формы колебаний /. Mirollo and Strogatz f1990b] показали, пто, если / монотонна и вогнута вниз (т.е. /' > 0, /" < 0), то гладкая пасть отображения F строго растягивающая (т.е. производная больше единицы). Это означает, пто невозможны другие аттракторы отображения Пуанкаре, кроме ф = 0. Притягивающая топка ф = 0 в топности соответствует
10 Мы пишем здесь 2тту а не ноль, чтобы показать, что два сброса осциллятора 2 приходятся на один сброс осциллятора 1.
(с)
2п
^1
2
2я ^ 0
2п
Ч>1
0
2
![]()
![]()
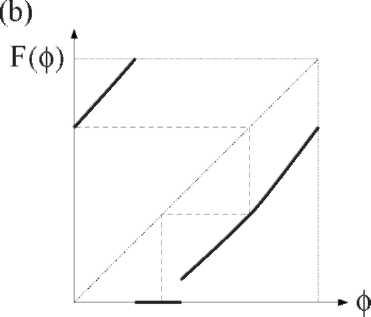
Описанное выше построение может быть легко обобщено на случай различных (в частности, имеющих различные автономные частоты) осцилляторов. Тогда медленное движение в уравнении 8.3 будет описываться прямой линией, не параллельной диагонали, а имеющей наклон 0/1/0/2- Отображение Пуанкаре будет иметь теперь гладкую часть (которая, как и в (8.18), представлена суперпозицией теперь уже различных отображений сброса) и часть, где новая фаза (modulo 2тт) равна нулю, см. рис. 8.4Ь. Устойчивая периодическая орбита этого отображения обязательно проходит через точку ф\ = ф2 = О, т.е. существует в точности одно событие совпадающих сбросов. В качестве примера, на рис. 8.5 показана синхронизация порядка 2 : 3
Ф
время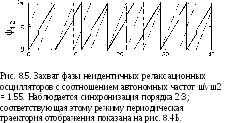
![]()
для систем с соотношении автономных частот 0/1/0/2 = 1-55.
Свойства такого негладкого отображения Пуанкаре сходны со свойствами гладкого (см. раздел 7.3). Основное отличие состоит в структуре «чертовой лестницы» и языков Арнольда. Как и в гладком случае, возможны все рациональные и иррациональные числа вращения, но мера иррациональных чисел (в пространстве параметров) теперь нулевая: ситуации с квазипериодическими режимами в отображении на рис. 8.4 исключительны; типичными являются периодические орбиты [Boyd 1985; Veerman 1989]. Это следует из сильной диссипации рассмотренной модели «накопление - сброс».
8.4 Библиографические заметки
Динамике связанных систем посвящена обширная литература. В последнее время основное внимание привлекает сложное поведение и возникновение хаоса за счет связи. В теоретических [Waller and Kapral 1984; Pastor-Diaz et al. 1993; Volkov and Romanov 1994; Pastor-Diaz and Lopez-Fraguas 1995; Tass 1995; Kurrer 1997; Lopez-Ruiz and Pomeau 1997; Reddy et al. 1999] и экспериментальных [Бондаренко и др. 1989; Thornburg et al. 1997] работах заинтересованный читатель найдет дальнейшие ссылки. Связанные ротаторы интенсивно рассматривались в связи с изучением цепочки контактов Джозефсона [Jain et al. 1984; Saitoh and Nishino 1991; Valkering et al. 2000]. В заключение, упомянем несколько недавних работ, где были рассмотрены различные обобщения модели «накопление - сброс» [Kirk and Stone 1997; Ernst et al. 1998; Coombes and Bressloff 1999; S. H. Park et al. 1999b],