

Лабораторная работа №3 программирование контроллера на выполнение технологическим объектом сложного алгоритма действий
Цель:
Ознакомится с виртуальным объектом автоматизации, приобрести навыки алгоритмизации управления технологическим объектом.
Теоретические положения:
В этой лабораторной работе предполагается программирование технологических объектов таким образом, что в результате работы выполнение действий одними исполнительными устройствами будет зависеть от других. А это в свою очередь означает, что логические функции, описывающие работу системы автоматизации, значительно усложняются.
Для решения заданий этой лабораторной работы потребуется введение некоторого количества промежуточных переменных.
Порядок выполнения работы:
Основной целью лабораторной работы является подготовка программы для ПК для заданного варианта задачи.
Логические функции, описывающие работу системы автоматизации, предлагается записывать на основе содержательного описания работы системы автоматизации. Последовательность подготовки программ для ПЛК будет такая:
а) Изучить объект автоматизации заданного варианта. Здесь необходимо:
уточнить последовательность работы оборудования;
уточнить назначение датчиков, число и назначение исполнительных устройств.
б) Для каждой выходной и для каждой промежуточной переменной составляется содержательное описание, по которому затем непосредственно записывается логическая функция (уравнение). Полученные логические функции необходимо переписать в адресах программируемого контроллера и составить программу для контроллера.
в) Подготовленную программу необходимо ввести в ПЭВМ, провести ее компиляцию, и затем записать в программируемый контроллер СРМ2А.
г) Убедиться в правильности работы составленной программы.
Пример выполнения задания:
Изучение объекта автоматизации
В качестве примера ниже рассмотрено управление механизмами роботизированного комплекса транспортировки изделий. Роботизированный комплекс (рис.23) предназначен для переноса изделий с автоматизированных линий (транспортеров) 5 и 6 на транспортер 7.
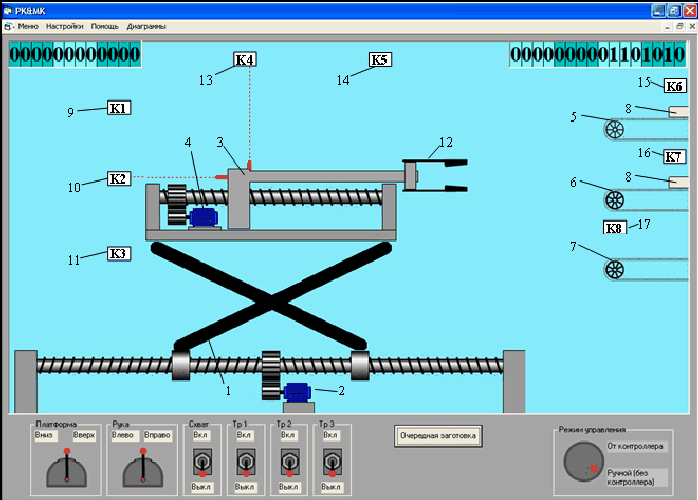
Рис.23. Роботизированный комплекс транспортировки изделий
Непосредственно робот содержит механизм подъема 1, управляемый от двигателя 2, привод выдвижения руки 3 с двигателем 4, схват 12, управляемый пневмоклапаном. Вертикальные перемещения манипулятора контролируются тремя индуктивными датчиками 9, 10, 11 (датчики К1, К2, К3), установленные прямо напротив соответствующих линий подачи заготовки. По горизонтали привод руки контролируется двумя датчиками 13 и 14 (датчики К4, К5) крайних левого и правого положений. Наличие заготовок определяется срабатыванием датчиков 15, 16 и 17 (датчики К6, К7, К8). Перемещение заготовок выполняется нереверсивными транспортерами 5, 6 и 7, при этом два первых транспортера 5 и 6 включаются для подачи заготовок влево, а транспортера 7 – направо.
Составление логических функций
Рассмотрим следующее задание.
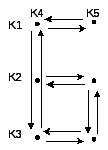
Необходимо автоматизировать работу двух механизмов – привода подъема манипулятора и привода выдвижения руки. В ручном режиме управления манипулятор устанавливается в положения К1, К4. В автоматическом режиме по команде «Пуск» с кнопки сенсорного монитора происходит перемещение только по одной координате: по вертикали до положения К2, затем перемещается по горизонтали до положения К5, после чего возвращается обратно на координаты К2,К4. Затем происходит перемещение по вертикали вновь вниз до координаты К3, после ее достижения возвращается вверх к координате К2, где повторно совершает движения вправо к координате К5 и обратно. Затем перемещается вверх к координатам К1, К4, где цикл повторяется. Таким образом, манипулятор осуществляет движения по следующей схеме:
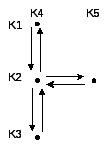
При нажатии кнопки «Стоп» манипулятор останавливается.
Теперь рассмотрим задание более подробно: перед началом работы в ручном режиме необходимо установить манипулятор в положение К1, К4. При нажатии оператором на кнопку «Пуск» (с кнопки сенсорного монитора) формируется команда на движение манипулятора до положения К2, К4. Как только манипулятор достиг положения К2, его рука начинает двигаться вправо до положения К2, К5. После достижения координаты К5, рука манипулятора начинает движение обратно влево к координатам К2, К4. Как только рука достигла положения К4, манипулятор начинает движение вниз до положения К3, К4. Из положения К3, К4 манипулятор возвращается к координатам К1, К4 по уже известной схеме, т.е сначала движется вверх до координаты К2, затем рука движется вправо до координат К2, К5, после этого возвращается обратно к координатам К2, К4 и манипулятор поднимается вверх к исходным координатам К1, К4. Цикл повторяется до тех пор, пока оператор не нажмет на кнопку «Стоп». Так же необходимо запрограммировать работу всех используемых в задании команд в ручном режиме.
Из описания приведенного выше видно, что для реализации задания нам необходимо выполнение следующих команд: движение манипулятора «Вверх», движение манипулятора «Вниз», движение руки «Вправо», движение руки манипулятора «Влево» и промежуточные переменные для повторения цикла, для памяти о том, что манипулятор побывал в положении К2, К5.
Исходя из проанализированного задания, составим таблицу (табл.6) входов и выходов контроллера с адресацией команд и сигналов. Все адреса команд и сигналов находятся в Приложении А.
Таблица 6. Адреса входов и выходов контроллера
|
Входные сигналы |
Выходные сигналы | ||
|
Обозначение |
Адрес в ПК |
Обозначение |
Адрес в ПК |
|
К1 |
IR000.00 |
Вв |
IR010.00 |
|
К2 |
IR000.01 |
Вн |
IR010.01 |
|
К3 |
IR000.02 |
Л |
IR010.02 |
|
К4 |
IR000.03 |
П |
IR010.03 |
|
К5 |
IR000.04 |
|
|
|
Входные сигналы с сенсорного монитора |
Промежуточные переменные | ||
|
Обозначение |
Адрес в ПК |
Обозначение |
Адрес в ПК |
|
Авт |
IR004.00 |
Гот |
IR031.06 |
|
Руч |
IR004.01 |
Р1 |
IR031.04 |
|
Пуск |
IR004.02 |
Р2 |
IR031.05 |
|
Стоп |
IR004.03 |
|
|
|
ВвРуч |
IR005.00 |
|
|
|
ВнРуч |
IR005.01 |
|
|
|
ЛевоРуч |
IR005.02 |
|
|
|
ПравоРуч |
IR005.03 |
|
|
Вв – движение манипулятора вверх;
Вн – движение манипулятора вниз;
Л – движение руки манипулятора влево;
П – движение руки манипулятора вправо;
Авт – кнопка перехода в автоматический режим;
Руч – кнопка перехода в ручной режим;
Пуск – кнопка запуска исполнения программы;
Стоп – кнопка остановки исполнения программы;
ВвРуч – кнопка на движение манипулятора вверх;
ВнРуч – кнопка на движение манипулятора вниз;
ЛевоРуч – кнопка на движение манипулятора влево;
ПравоРуч – кнопка на движение манипулятора вправо;
Гот – промежуточная переменная, готовность к работе в автоматическом режиме.
Рассмотрим команды подробнее, составим их содержательное описание.
Перед нами стоит задача сделать так, чтобы в автоматическом режиме процесс повторялся непрерывно, т.е. ввести такую переменную, которая содержала бы условия включения и выключении. Назовем переменную «Гот», что означает готовность к работе в автоматическом режиме. Эта переменная сформируется тогда, когда манипулятор будет находиться в положении К1, К4 и будет нажата кнопка «Пуск» на экране сенсорного монитора, и будет продолжаться до тех пор пока не поступит сигнал «Стоп» или оператор переключится из автоматического режима в ручной. Получаем следующую логическую функцию:
![]()
Команда «Вниз» формируется тогда, когда манипулятор находится в положении К1, К4, при условии, что на протяжении всего действия нет сигнала Р1, продолжается до тех пор пока не достигнет положения К2; и в положении К2, К4, при условии, что на протяжении всего действия есть сигнала Р1 и нет сигнала Р2, продолжается до тех пор пока не сработает датчик К3. В ручном режиме она возникает при наличии команд ВнРуч. Этому описанию команды «Вниз» соответствует следующая логическая функция:
![]()
Команда «Вверх» формируется тогда, когда манипулятор находится в положении К1, К3, при условии что нет сигнала Р1 и продолжается до тех пор пока не достигнет положения К2; и в положении К2, К4, при условии, что на протяжении всего действия есть сигнала Р1 и есть сигнала Р2, продолжается до тех пор пока не сработает датчик К1. В ручном режиме команда возникает при наличии команд ВвРуч. Этому описанию команды «Вверх» соответствует следующая логическая функция:
![]()
Команда «Вправо» в автоматическом режиме формируется тогда, когда манипулятор находится в положении К2, К4, при условии что нет сигнала Р1 на протяжении всего действия, и сохраняется до тех пор пока рука манипулятора не достигнет положения К5. В ручном режиме возникает при наличии команды ПРуч. Логическая функция:
![]()
Команда «Влево» в автоматическом режиме формируется тогда, когда рука манипулятора находится в положении К2, К5, сохраняется до тех пор пока присутствует сигнал Р1 и рука манипулятора не достигнет положения К4. В ручном режиме возникает при наличии команды ЛРуч. Логическая функция:
![]()
Нам осталось описать промежуточные переменные Р1 и Р2. Переменная Р1 служит памятью о том что манипулятор побывал в положении К2, К5, таким образом она формируется тогда, когда манипулятор находится в положении К2, К5, и сохраняется до тех пор пока манипулятор не достигнет положения К1 или К3. Соответственно логическая функция будет иметь вид:
![]()
Переменная Р2 условно разбивает цикл на 2 этапа: движение вниз и движение вверх. Она формируется тогда, когда манипулятор находится в положении К3, К4, и сохраняется до тех пор пока манипулятор не достигнет положения К1. Соответственно логическая функция будет иметь вид:
![]()
После того как мы составили словесное описание всех команд, составим диаграммы состояния входов и выходов в автоматическом режиме (рис.24):
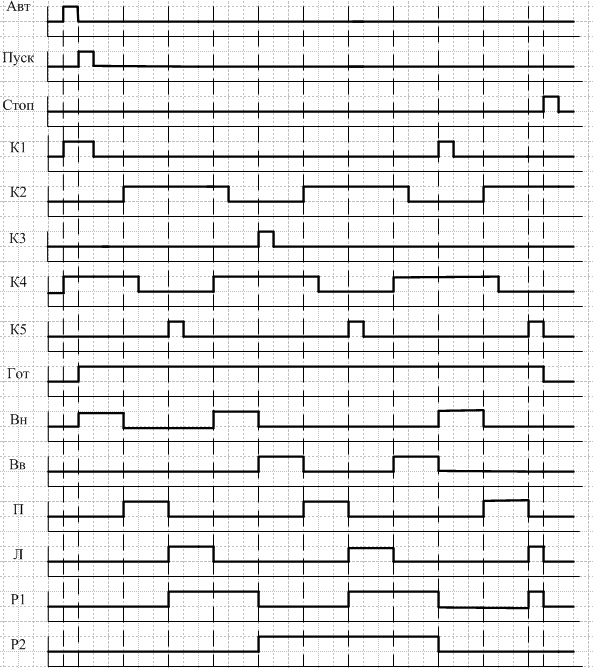
Рис.24. Диаграммы состояния входов и выходов в автоматическом режиме
Предварительно перед составлением программы перепишем логические уравнения в адресах программируемого контроллера CPM2A.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В соответствии с вышеизложенными функциями на рис.25. представлена программа контроллера СРМ2А на языке лестничных диаграмм.

Рис.25. Программа контроллера СРМ2А на языке лестничных диаграмм
Требования к отчету
Отчет должен содержать:
цель работы;
описание последовательности действий, выполняемых объектом согласно заданию;
таблицу, содержащую обозначения используемых сигналов и команд при управлении объектом, их непосредственные адреса в контроллере CPM2A;
содержательное описание формирования промежуточных переменных и выходных команд контроллера CPM2A и составленные на основе содержательного описания соответствующие логические функции;
диаграммы состояния входов и выходов в автоматическом режиме;
логические функции в адресах программируемого контроллера CPM2A;
программу для контроллера CPM2A на языке лестничных диаграмм;
результаты проверки правильности работы реализуемой системы;
выводы по работе.
Задания для самостоятельного решения
Для всех вариантов необходимо запрограммировать контроллер на работу объекта в автоматическом и в ручном режиме.
Вариант 1
Объект 7. Химическая линия.
Исходное положение барабана КВ, тележки – П1. После кратковременного появления команды «Пуск» (кнопка на экране сенсорного монитора) барабан погружается в ванну и вращается в растворе 3 сек. Затем барабан переносится к положению П2, погружается в ванну и вращается в растворе 6 сек. Затем возвращается к положению П1, цикл повторяется. При нажатии на кнопку «Стоп» процесс прекращается.
Вариант 2
Объект 7. Химическая линия.
Исходное положение барабана КВ, тележки – П4. После кратковременного появления команды «Пуск» (кнопка на экране сенсорного монитора) барабан погружается в ванну и вращается в растворе 2 сек. Затем барабан переносится в зону сушки. Включается двигатель вентилятора на 4 сек. После чего барабан возвращается в положение П4, затем цикл повторяется. При нажатии на кнопку «Стоп» процесс прекращается.
Вариант 3
Объект 7. Химическая линия.
Исходное положение барабана КВ, тележки – П1. После кратковременного появления команды «Пуск» (кнопка на экране сенсорного монитора) барабан погружается в ванну, после чего поднимается до положения КВ, и перемещается к П2. В положении П2 барабан погружается в ванну, после чего поднимается до положения КВ, и перемещается к П3. В положении П3 барабан погружается в ванну, после чего поднимается до положения КВ, и перемещается к П1. В положении П1 цикл повторяется. При нажатии на кнопку «Стоп» процесс прекращается.
Вариант 4
Объект 8. Участок упаковки.
Необходимо автоматизировать движения толкателя и подъемника. Исходное положение: подъемник находится в положении КН, толкатель – в положении КЛТ. После нажатия кнопки «Пуск» (на экране сенсорного монитора) толкатель перемещается вправо до положения КПТ, затем подъемник перемещается вверх в положение КВ. После паузы в 4 сек. подъемник опускается до положения КН, затем толкатель возвращается к положению КЛТ. Далее цикл работы непрерывно повторяется до нажатия кнопки «Стоп» (на экране сенсорного монитора).
Вариант 5
Объект 8. Участок упаковки.
Необходимо автоматизировать движения захвата и подъемника. Исходное положение: подъемник находится в положении КН, захват – в положении П1. После нажатия кнопки «Пуск» (на экране сенсорного монитора) захват перемещается вниз до положения П2, затем подъемник перемещается вверх в положение КВ. После паузы в 3 сек. подъемник опускается до положения КН, затем захват возвращается к положению П1. Далее цикл работы непрерывно повторяется до нажатия кнопки «Стоп» (на экране сенсорного монитора).
Вариант 6
Объект 8. Участок упаковки.
Необходимо автоматизировать движения захвата. Исходное положение: захват разжат и находится в положении П1, тележка – в положении П3. После нажатия кнопки «Пуск» (на экране сенсорного монитора) тележка перемещается вправо до положения П4, затем захват перемещается вниз в положение П2. После паузы в 2 сек. захват поднимается до положения П1, затем тележка возвращается к положению П3. Далее цикл работы непрерывно повторяется до нажатия кнопки «Стоп» (на экране сенсорного монитора).
Вариант 7
Объект 9. Лифт.
При нажатии на кнопку Э2 (на экране сенсорного монитора или на экране ПЭВМ), лифт, на каком бы этаже не находился, совершает перемещение на 2-ой этаж. Перемещение совершается только с закрытыми дверями. При остановке на втором этаже двери кабины лифта открываются. При нажатии на кнопку «Стоп» процесс перемещений прекращается.
Вариант 8.
Объект 9. Лифт.8
При нажатии на кнопку Э1 (на экране сенсорного монитора или на экране ПЭВМ), лифт, на каком бы этаже не находился, совершает перемещение на 1-ый этаж. Перемещение совершается только с закрытыми дверями. При остановке на первом этаже двери кабины лифта открываются. При нажатии на кнопку «Стоп» процесс перемещений прекращается.
Вариант 9
Объект 9. Лифт.
При нажатии на кнопку Э3 (на экране сенсорного монитора или на экране ПЭВМ), лифт, на каком бы этаже не находился, совершает перемещение на 3-ий этаж. Перемещение совершается только с закрытыми дверями. При остановке на третьем этаже двери кабины лифта открываются. При нажатии на кнопку «Стоп» процесс перемещений прекращается.
Вариант 10
Объект 1. Роботизированный комплекс.
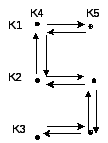
Необходимо автоматизировать работу двух механизмов – привода подъема манипулятора и привода выдвижения руки. В ручном режиме управления манипулятор устанавливается в положения К1, К4. В автоматическом режиме по команде «Пуск» с кнопки сенсорного монитора происходит перемещение только по одной координате: по горизонтали до положения К5, затем возвращается в исходное положение. После этого перемещается по вертикали вниз до координаты К3, затем происходит перемещение только по одной координате: по горизонтали до положения К5, затем возвращается в координаты К3, К5. После этого перемещается по вертикали вверх до координаты К1 и т.д. Таким образом, манипулятор описывает по часовой стрелке в пространстве букву «С». При нажатии кнопки «Стоп» манипулятор останавливается.
Вариант 11
Объект 1. Роботизированный комплекс.
Необходимо автоматизировать работу двух механизмов – привода подъема манипулятора и привода выдвижения руки. В ручном режиме управления манипулятор устанавливается в положения К1, К5. В автоматическом режиме по команде «Пуск» с кнопки сенсорного монитора происходит перемещение только по одной координате: по горизонтали до положения К4, затем перемещается по вертикали до положения К2, после чего совершает движение вправо до координат К2,К5. Затем происходит перемещение по вертикали вниз до координаты К3, после ее достижения перемещается влево к координате К4, после этого возвращается к координатам К5,К1 по той же траектории, т.е. К3,К4->К3,К5->К2,К5->К2,К4->К1,К4->К1,К5, затем цикл повторяется. Таким образом, манипулятор осуществляет движения по следующей схеме.
При нажатии кнопки «Стоп» манипулятор останавливается.
Вариант 12
Объект 1. Роботизированный комплекс.
Необходимо автоматизировать работу двух механизмов – привода подъема манипулятора и привода выдвижения руки. В ручном режиме управления манипулятор устанавливается в положения К1, К4. В автоматическом режиме по команде «Пуск» с кнопки сенсорного монитора происходит перемещение только по одной координате: по вертикали до положения К3, затем перемещается по горизонтали до положения К5, после чего совершает движение вверх до координат К2,К5. Затем происходит перемещение влево до координаты К4, после ее достижения перемещается снова вверх, к координатам К1, К4, затем цикл повторяется. Таким образом манипулятор осуществляет движения по следующей схеме.

При нажатии кнопки «Стоп» манипулятор останавливается.
Вариант 13
Объект 2. Методическая печь.
Необходимо автоматизировать работу двух механизмов - задвижки и рольганга. При наличии заготовки в положении ПР0 и нажатии на экране сенсорного монитора кнопки «Пуск» включается рольганг Р2. При достижении заготовкой положения ПР2 рольганг останавливается, заслонка открывается и через 5с заслонка закрывается, после этого заготовка возвращается обратно до положения ПР0, затем цикл повторяется. При нажатии на кнопку «Стоп» на экране сенсорного монитора процесс прекращается.
Вариант 14
Объект 2. Методическая печь.
Необходимо автоматизировать работу двух механизмов - толкателя и задвижки. При поступлении с экрана сенсорного монитора команды «Пуск» электропривод толкателя включается и из исходного положения ПТ0 толкатель движется к промежуточному положению ПТ1, где останавливается. В этот момент начинает открываться заслонка, и после ее открытия толкатель вновь движется вперед. При достижении толкателем положения ПТ3 происходит реверс и он возвращается в исходное состояние ПТ0. Как только толкатель при движении назад проходит положение ПТ2, заслонка закрывается. Цикл повторяется при повторном нажатии на кнопку «Пуск» на экране сенсорного монитора.
Вариант 15
Объект 2. Методическая печь.
Необходимо автоматизировать работу двух механизмов - толкателя и рольганга. При наличии заготовки в положении ПР0 и нажатии на экране сенсорного монитора кнопки «Пуск» включается рольганг Р2. При достижении заготовкой положения ПР2 рольганг останавливается, толкатель двигается вперед до положения ПТ1 и через 2с совершает реверс к положению ПТ0, после этого заготовка возвращается обратно до положения ПР0, затем цикл повторяется. При нажатии на кнопку «Стоп» на экране сенсорного монитора процесс прекращается.
Вариант 16
Объект 3. Нагревательный колодец.
В ручном режиме тележка устанавливается в положение ВП, П0. При первом нажатии на кнопку «Пуск» тележка перемещается влево до положения П2, где останавливается на 3с и возвращается в исходное положение П0. Затем тележка доходит до положения П1, где останавливается на 4с и возвращается в исходное положение. Движение «Влево» от положения П1 к положению П0 осуществляется на медленной скорости. Далее цикл непрерывно повторяется до нажатия на кнопку «Стоп».
Вариант 17
Объект 3. Нагревательный колодец.
Автоматизировать работу механизма управления крышкой нагревательных колодцев. При подаче сигнала «Пуск» (с кнопки на экране сенсорного монитора) открывается крышка колодца и тележка движется вправо до П2, где через 1 с происходит реверс. В положении П1 тележка переходит на малую скорость и возвращается в исходное состояние П0. Крышка колодца закрывается. Далее цикл непрерывно повторяется до нажатия на кнопку «Стоп».
Вариант 18
Объект 3. Нагревательный колодец.
Автоматизировать работу механизма управления крышкой нагревательных колодцев. Исходное положение крышки НП. При первом нажатии на кнопку «Пуск» открывается крышка нагревательного колодца до положения ВП, где останавливается на 5 сек. и возвращается в исходное положение НП и остается там 2 сек. Затем крышка доходит до положения ВП, где останавливается на 3с и возвращается в исходное положение НП. На этом процесс перемещений заканчивается. При нажатии на кнопку «Пуск» цикл повторяется.
Вариант 19
Объект 4. Сортировка листов.
Требуется автоматизировать процесс перемещения листа со стола раскладывателя на левый стол, независимо от качества листа. Из исходного состояния при наличии листов на столе (тележка находится в положении П4, подъемник в верхнем положении КВ) по команде «Пуск» ( кнопка на экране сенсорного монитора) подъемник опускается вниз до момента срабатывания датчика касания листа КСЛ. При срабатывании этого датчика выключается опускание подъемника и включается питание электромагнита, тем самым происходит захват листа. Далее с задержкой в 1 сек. осуществляется подъем штанги и электромагнита с листом до верхнего положения КВ. Затем тележка на ползучей скорости перемещается из положения П4 в положение П1, где останавливается. Подъемник опускает лист на стол и оставляет его там (опускание осуществляется до срабатывания датчика КСС). На этом процесс перемещений заканчивается. При нажатии на кнопку «Стоп» процесс прекращается.
Вариант 20
Объект 4. Сортировка листов.
Требуется автоматизировать процесс перемещений подъемника и тележки раскладывателя. Исходное положение тележки П1, КВ. При нажатии на кнопку «Пуск» (кнопка на экране сенсорного монитора) тележка движется вправо до положения П4 (от положения П3 на медленной скорости), затем подъемник опускается до положения ПМ. После этого тележка продолжает двигаться вправо до положения П7, из положения П7 тележка возвращается по тому же маршруту к исходному положению П1, т.е. тележка движется влево до П4 (от положения П5 на медленной скорости), затем подъемник поднимается вверх до КВ, после этого тележка снова движется влево до П1.Затем цикл повторяется. При нажатии на кнопку «Стоп» процесс прекращается.
Вариант 21
Объект 4. Сортировка листов.
Требуется автоматизировать процесс перемещений тележки раскладывателя. Если траверса не находится в верхнем положении, то необходимо осуществить подъем траверсы в ручном режиме работы. Исходное положение тележки П4. При каждом нечетном нажатии на кнопку «Пуск» (кнопка на экране сенсорного монитора) тележка из положения П4 движется в положение П2, стоит в нем в течение 2с и возвращается в положение П4. При каждом четном нажатии на кнопку «Пуск» тележка из положения П4 движется в положение П7, стоит в нем в течение 3с и возвращается в положение П4. При нажатии на кнопку «Стоп» процесс прекращается.
Вариант 22
Объект 5. Участок транспортировки труб.
Требуется автоматизировать процесс загрузки трубы. Исходное положение тележки П9, имеется сигнал С1, т.е. на рольганге Р3 находится труба. При нажатии на кнопку «Пуск» (кнопка на экране сенсорного монитора) труба на рольганге Р3 перемещается до положения П3. Включается рольганг Р0, труба движется до положения П0. Затем тележка с трубой перемещается до положения П6, от положения П7 движется на медленной скорости. В положении П6 происходит включение рольганга Р0 и рольганга Р2, труба перемещается вперед до положения П2. Затем тележка возвращается к положению П9, от положения П8 – на медленной скорости. Цикл повторяется при наличии сигнала С1. При нажатии на кнопку «Стоп» процесс перемещений прекращается.
Вариант 23
Объект 5. Участок транспортировки труб.
Требуется автоматизировать процесс загрузки трубы. Исходное положение тележки П10, имеется сигнал С2, т.е. на рольганге Р4 находится труба. При нажатии на кнопку «Пуск» (кнопка на экране сенсорного монитора) труба на рольганге Р4 перемещается до положения П4. Включается рольганг Р0, труба движется до положения П0. Затем тележка с трубой перемещается до положения П5, от положения П6 движется на медленной скорости. В положении П7 происходит включение рольганга Р0 и рольганга Р1, труба перемещается вперед до положения П1. Затем тележка возвращается к положению П10, от положения П9 – на медленной скорости. Цикл повторяется при наличии сигнала С2. При нажатии на кнопку «Стоп» процесс перемещений прекращается.
Вариант 24
Объект 5. Участок транспортировки труб.
Требуется автоматизировать процесс перемещений тележки. Исходное положение тележки П10. При нажатии на кнопку «Пуск» (кнопка на экране сенсорного монитора) тележка из положения П10 движется в положение П8 через 5 сек. происходит реверс к положения П10, после этого тележка перемещается к положению П9, где через 2 сек. происходит реверс к положению П10, затем цикл повторяется. Все движения совершаются на медленной скорости. При нажатии на кнопку «Стоп» процесс перемещений прекращается.
Вариант 25
Объект 6. Сверлильный станок.
После кратковременного появления команды «Пуск» (кнопка на экране сенсорного монитора) шпиндельная бабка из верхнего положения П0 ускоренно движется до положения П1. От П1 до П2 ШБ движется на малой скорости с включенным шпинделем. В положении П2 через 5 сек. происходит реверс двигателя и шпиндельная бабка ускоренно возвращается в П0. По пути при достижении ею положения П1 отключается вращение сверла. Повторение цикла осуществляется при следующем появлении команды «Пуск».
Вариант 26
Объект 6. Сверлильный станок.
После кратковременного появления команды «Пуск» (кнопка на экране сенсорного монитора) шпиндельная бабка из верхнего положения П0 ускоренно движется до положения П2. От П2 до П4 ШБ движется на малой скорости с включенным шпинделем с малой скоростью. В положении П4 через 2 сек. происходит реверс двигателя и шпиндельная бабка ускоренно возвращается в П0. По пути при достижении ею положения П2 отключается вращение сверла. Повторение цикла осуществляется при следующем появлении команды «Пуск».
Вариант 27
Объект 6. Сверлильный станок.
После кратковременного появления команды «Пуск» (кнопка на экране сенсорного монитора) включается двигатель вращения сверла на медленную скорость и шпиндельная бабка из верхнего положения П0 движется вниз до положения П3, затем возвращается в П0. Через 1 секунду ШБ из верхнего положения П0 движется вниз до П2, далее реверсируется и вновь возвращается в П0, затем цикл повторяется. При нажатии на кнопку «Стоп» процесс прекращается.
Вариант 28
Объект 1. Роботизированный комплекс.
Необходимо автоматизировать работу двух механизмов – привода подъема манипулятора и привода выдвижения руки. В ручном режиме управления манипулятор устанавливается в положения К1, К5. В автоматическом режиме по команде «Пуск» с кнопки сенсорного монитора происходит перемещение только по одной координате: по горизонтали до положения К4, затем перемещается по вертикали до положения К3, после чего совершает движение вправо до координат К3,К5. Затем происходит перемещение по вертикали вверх до координаты К2, после ее достижения перемещается влево к координате К4, после этого возвращается к координатам К5,К1 по той же траектории, затем цикл повторяется. Таким образом манипулятор осуществляет движения по следующей схеме.
При нажатии кнопки «Стоп» манипулятор останавливается.
Вариант 29
Объект 2. Методическая печь.
Необходимо автоматизировать работу двух механизмов - толкателя и задвижки. При поступлении с экрана сенсорного монитора команды «Пуск» открывается заслонка, после этого включается электропривод толкателя и из исходного положения ПТ0 толкатель движется к положению ПТ3, где останавливается на 3 сек. После этого толкатель возвращается в положение ПТ0, затем закрывается заслонка. Цикл повторяется, при нажатии на кнопку «Стоп» на экране сенсорного монитора процесс прекращается.
Вариант 30
Объект 3. Нагревательный колодец.
Автоматизировать работу механизма управления крышкой и тележкой нагревательных колодцев. В ручном режиме тележка устанавливается в положение НП, П0. При подаче сигнала «Пуск» (с кнопки на экране сенсорного монитора) открывается крышка колодца до положения ВП, после этого движется вправо до П1, где происходит задержка на 3с и тележка продолжает двигаться вправо до положения П2, здесь происходит реверс до положения П1, где происходит задержка на 5с, после этого тележка продолжает двигаться влево до П0, затем тележка вновь движется вправо с задержкой на 3с на П1, и возвращается с задержкой на 5с, т.е тележка повторяет свои движения по горизонтали. Все движения тележки происходят на медленной скорости. При нажатии на кнопку «Стоп» процесс прекращается.
ПРИЛОЖЕНИЕ А