

Изучение объекта автоматизации
В качестве примера ниже рассмотрено управление механизмами методической печи (участок транспортировки изделий в методическую печь для их нагрева перед прокаткой). Упрощенный вид методической печи представлен на рис.15. Это один из вариантов виртуальных объектов, представленных в Приложении А, в нем дано подробное описание методической печи.
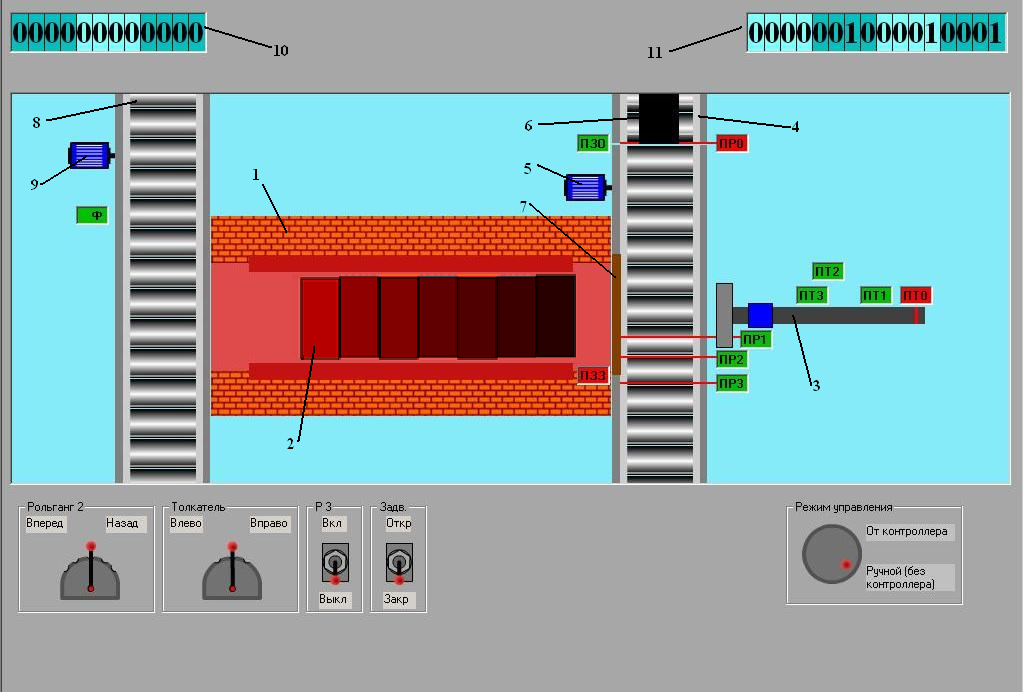
Рис.15. Участок транспортировки заготовок в методическую печь.
На рис.15 кроме конструктивных механизмов объекта, расположения датчиков и исполнительных устройств, представлены линейки битов управляющих команд на исполнительные устройства 6 и состояние датчиков объекта 7. Единица в бите линейки соответствует наличию команды и наличию сигнала с датчика.
При появлении заготовки 6 в положении ПР0 подающего рольганга 4 (Р1) включается рольганг Р2 вперед и заготовка движется к переднему окну печи до положения ПР2. Заготовка стоит перед печью. Включается толкатель вперед и движется до положения ПТ1. В этом положении толкателя включается двигатель заслонки 7 на ее открытие. Заслонка уходит из закрытого положения заслонки ПЗЗ и при достижении открытого положения заслонки ПЗО останавливается. Вновь включается толкатель для движения вперед.
При своем движении толкатель сталкивает заготовку с рольганга и подает ее в печь 1, передвигая при этом все нагреваемые заготовки в печи. В режиме работы с полной загрузкой печи толкатель должен проделать путь, при котором крайняя заготовка выталкивается из печи и по склизу попадает на отводящий рольганг 8 (РЗ).
При этом засвечивается фотоэлектрический датчик Ф, при срабатывании которого включается отводящий рольганг (РЗ), транспортируя заготовку к прокатному стану, а толкатель реверсируется и движется в исходное положение. При прекращении засветки датчика Ф отводящий рольганг останавливается. При остановке толкателя в положении ПТО возможна подача к печи очередной заготовки.
Рольганг Р2 приводится в движение двигателем 5. Привод заслонки условно не показан. Привод отводящего рольганга приводится в движение двигателем 9. Толкатель приводится в движение двигателем, который условно не показан.
Составление логических функций
Рассмотрим следующее задание:
При наличии заготовки в положении ПР0 и нажатии на экране сенсорного монитора кнопки «Пуск» включается рольганг Р2. При достижении заготовкой положения ПР2 рольганг совершает реверс и возвращается в положение ПР0, затем цикл повторяется. При нажатии на кнопку «Стоп» на экране сенсорного монитора процесс прекращается.
Теперь рассмотрим задание более подробно: после того как пришла заготовка на рольганг Р2 оператор нажимает кнопку «Пуск», после ее нажатия формируется команда на движение рольганга вперед. Рольганг продолжает двигаться вперед до тех пор пока не сработает датчик ПР2, при его срабатывании автоматически должна формироваться команда на движение рольганга назад до тех пор пока не сработает датчик ПР0, с этого момента весь цикл который был проделан ранее повторяется. Если произойдет нажатие кнопки «Стоп» автоматически весь процесс останавливается. Так же необходимо запрограммировать работу всех используемых в задании команд в ручном режиме.
Из описания приведенного выше видно, что для реализации задания нам необходимо выполнение двух команд: движение рольганга «Вперед» и движение рольганга «Назад», также необходима промежуточная переменная, которая означает готовность системы к работе до остановки.
Исходя из проанализированного задания, составим таблицу (табл.3) входов и выходов контроллера с адресацией команд и сигналов. Все адреса команд и сигналов находятся в Приложении А.
Таблица 3. Адреса входов и выходов контроллера
|
Входные сигналы |
Выходные сигналы | ||
|
Обозначение |
Адрес в ПК |
Обозначение |
Адрес в ПК |
|
ПР0 |
IR000.00 |
Рв |
IR010.00 |
|
ПР2 |
IR000.02 |
Рн |
IR010.01 |
|
Входные сигналы с сенсорного монитора |
Промежуточные переменные | ||
|
Обозначение |
Адрес в ПК |
Обозначение |
Адрес в ПК |
|
Авт |
IR004.00 |
Гот |
IR021.00 |
|
Руч |
IR004.01 |
|
|
|
Пуск |
IR004.02 |
|
|
|
Стоп |
IR004.03 |
|
|
|
РвРуч |
IR005.00 |
|
|
|
РнРуч |
IR005.01 |
|
|
Рв – движение рольганга Р2 вперед;
Рн – движение рольганга Р2 назад;
Авт – кнопка перехода в автоматический режим;
Руч – кнопка перехода в ручной режим;
Пуск – кнопка запуска исполнения программы;
Стоп – кнопка остановки исполнения программы;
РвРуч – кнопка движения рольганга Р2 вперед в ручном режиме;
РнРуч – кнопка движения рольганга Р2 назад в ручном режиме;
Гот – промежуточная переменная, готовность к работе в автоматическом режиме.
Рассмотрим команды подробнее, составим их содержательное описание.
Перед нами стоит задача сделать так, чтобы в автоматическом режиме процесс повторялся непрерывно, т.е. ввести такую переменную, которая включала условия включения и выключении. И так назовем переменную «Гот», что означает готовность к работе в автоматическом режиме. Эта переменная сформируется тогда, когда придет заготовка на рольганг Р2 и будет нажата кнопка «Пуск» на экране сенсорного монитора, и будет продолжаться до тех пор пока не поступит сигнал «Стоп» или оператор переключится из автоматического режима в ручной. Получаем следующую логическую функцию:
![]()
Команда «Вперед» формируется тогда, когда заготовка пришла на рольганг Р2 (датчик ПР0 активен) или вернулась к датчику ПР0, и продолжается до тех пор пока заготовка не достигнет датчика ПР2. В ручном режиме она возникает при наличии команды РвРуч и продолжается до тех пор, пока оператор не отпустит эту кнопку или заготовка не достигнет положения ПР2. Этому описанию команды «Вперед» соответствует следующая логическая функция:
![]()
Команда «Назад» формируется тогда, когда заготовка находится в положении ПР2 и продолжается до тех пор пока не сработает датчик ПР0. В ручном режиме она возникает при наличии команды РнРуч и продолжается до тех пор, пока оператор не отпустит эту кнопку или заготовка не достигнет положения ПР0. Этому описанию команды «Назад» соответствует следующая логическая функция:
![]()
После того как мы составили словесное описание всех команд, составим диаграммы состояния входов и выходов в автоматическом режиме (рис.16):
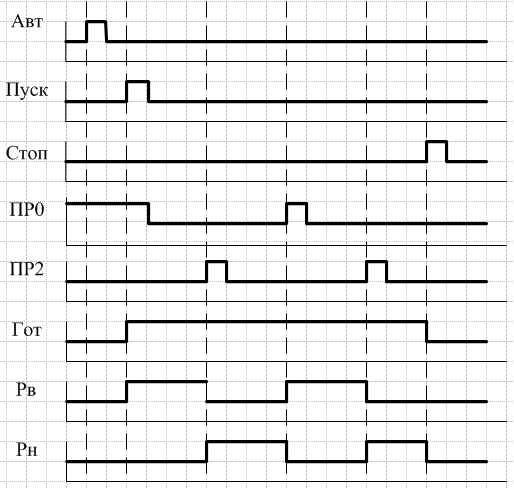
Рис.16. Диаграммы состояния входов и выходов
в автоматическом режиме
Предварительно перед составлением программы перепишем логические уравнения в адресах программируемого контроллера CPM2A.
![]()
![]()
![]()
![]()
![]()
![]()
В соответствии с вышеизложенными функциями на рис.17 представлена программа контроллера СРМ2А на языке лестничных диаграмм.
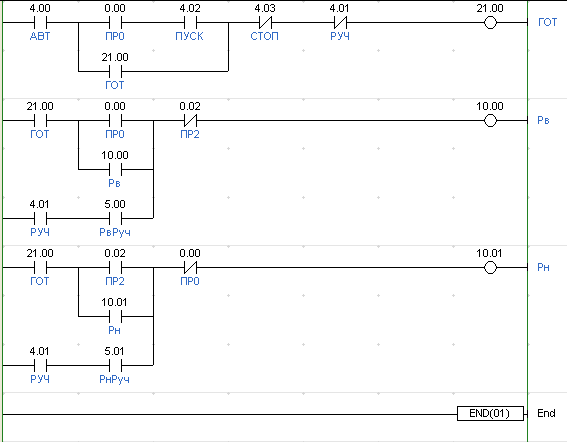
Рис.17. Программа контроллера СРМ2А на языке лестничных диаграмм