

В синтезированной системе электропривода
6. Многоконтурные системы регулирования
6.1. Многоконтурные системы с подчиненным регулированием координат
Для решения задач синтеза замкнутых систем регулирования, обладающих хорошим быстродействием и желаемым характером переходных процессов, разработан инженерный метод синтеза, получивший название метода последовательной коррекции с подчиненным регулированием координат или сокращенно метод подчиненного регулирования. В основе этого метода лежит разработка многоконтурных систем, когда в результате синтеза каждый из контуров описывается передаточной функцией второго или третьего порядка и обеспечивает оптимальное управление своей выходной регулируемой координатой.
Для построения такой системы в структурной схеме неизменяемой части системы выделяют последовательность динамических звеньев, каждое из которых имеет на своем выходе соответствующую регулируемую координату, в электроприводах это: ток (I), скорость (), угол поворота () или путь (s). После этого синтезируют контуры регулирования, начиная с контура тока - первой внутренней координаты. Синтез обычно выполняется с использованием активных последовательных корректирующих звеньев (регуляторов), реализуемых на операционных усилителях постоянного тока с большим коэффициентом усиления.
В состав каждого контура входит объект регулирования с передаточной функцией W(p)ор, апериодическое звено с малой постоянной времени W(p) и регулятор W(p)рег. В результате образуется многоконтурная (2х или 3х-контурная) система подчиненного регулирования, построенная по иерархическому принципу, как показано на рис.6.1.
Рис.6.1.
Трехконтурная система с подчиненным
регулированием 
I, , - регулируемые координаты,f1, f2, f3 - возмущения
6.2. Принципы оптимизации в системах подчиненного регулирования
При синтезе контуров регулирования используется два типа оптимальных настроек: настройка на модульный оптимум (МО) и настройка на симметричный оптимум (СО). Выбор типа настройки определяется требованиями к статическим и динамическим характеристикам при отработке управляющих воздействий и возмущений, действующих внутри контура регулирования.
Модульный оптимум настройки контуров регулирования
Считается, что замкнутый контур регулирования с единичной обратной связью настроен на модульный оптимум, если он имеет передаточную функцию второго порядка вида
![]() ,
(6.1)
,
(6.1)
где
![]() - малая постоянная времени некомпенсируемого
апериодического звена;
- малая постоянная времени некомпенсируемого
апериодического звена;
аМ=1ч4 – коэффициент модульной настройки;
аМ=2 - стандартный коэффициент настройки контура.
Эту передаточную функцию можно записать в форме, соответствующей колебательному звену
 , (6.2)
, (6.2)
где
![]() - эквивалентная постоянная времени
колебательного звена;
- эквивалентная постоянная времени
колебательного звена;
![]() -
частота недемпфируемых колебаний;
-
частота недемпфируемых колебаний;
![]() -
коэффициент демпфирования колебаний.
-
коэффициент демпфирования колебаний.
Для
стандартной настройки ![]() ,
,
![]() .
.
Действительная частота колебаний звена второго порядка определяется соотношением
![]() . (6.3)
. (6.3)
Следовательно, с возрастанием коэффициента демпфирования действительная частота колебаний в контуре регулирования уменьшается. При стандартной настройке на МО, когда аМ=2,
![]() . (6.4)
. (6.4)
Переходный процесс отработки ступенчатого задающего воздействия представлен на рис.6.2. Он описывается уравнением
Рис.6.2.
Переходные функции контура регулирования,
настроенного на модульный оптимум
1
– передаточной функции 2-го порядка,
ам=2
2
– эквивалентная по времени τэкспонента

 . (6.5)
. (6.5)
И
имеет следующие показатели качества:
время переходного процесса ![]() ;
время нарастания
;
время нарастания ![]() ;
время первого максимума
;
время первого максимума ![]() ;
перерегулирование
;
перерегулирование ![]() %;
число колебаний
%;
число колебаний ![]() .
.
Следовательно, в контуре, настроенном на МО, достигается компромисс между быстродействием и перерегулированием, когда при сравнительно хорошем быстродействии
(![]() )
перерегулирование составляет
)
перерегулирование составляет
менее
5% (![]() %).
По динамическим
%).
По динамическим
показателям этот переходный процесс можно считать приемлемым для многих технологических установок. Разомкнутый контур, настроенный на МО, имеет передаточную функцию
![]() . (6.6)
. (6.6)
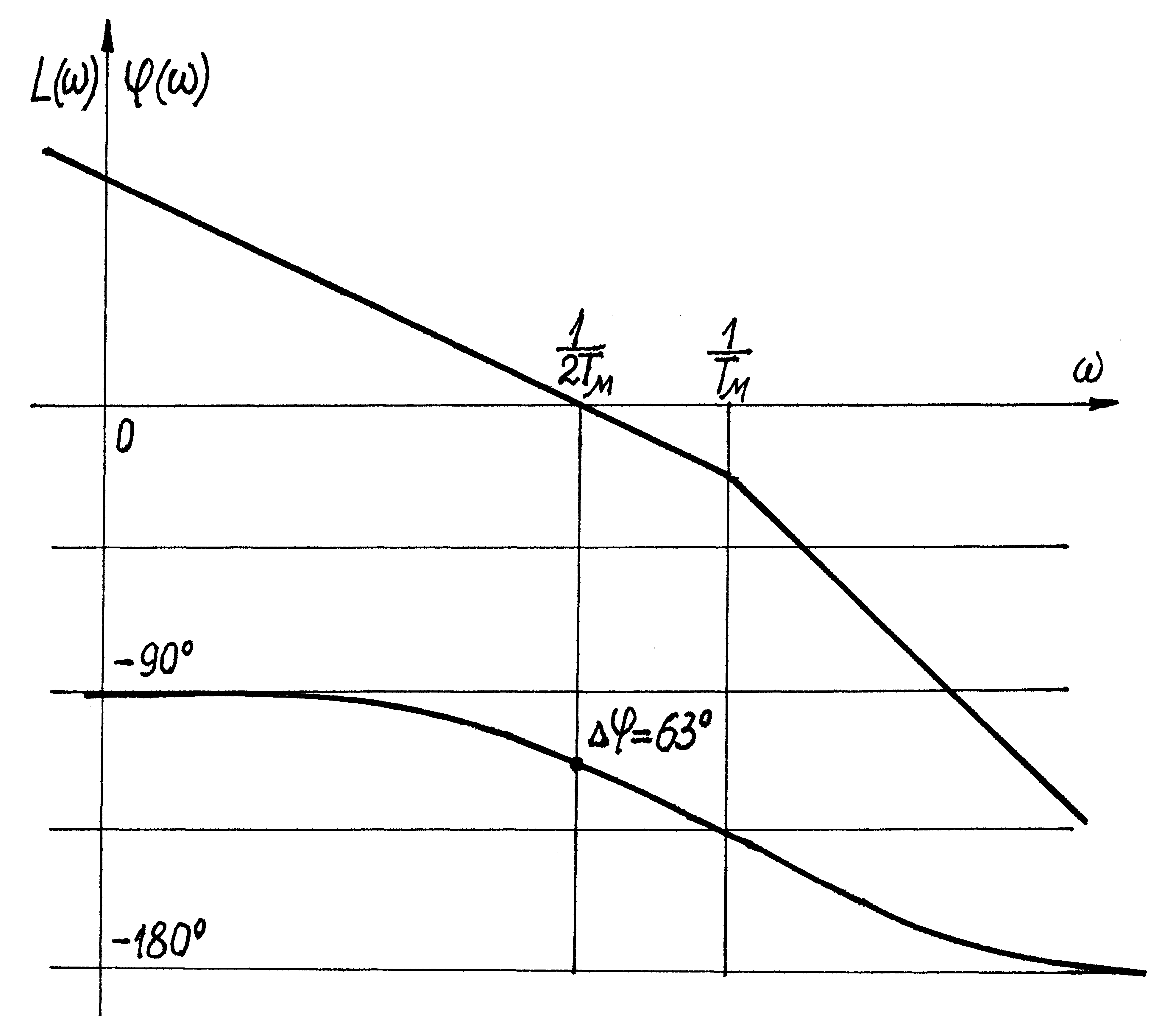
Рис.6.3.
ЛАЧХ и ЛФЧХ разомкнутого контура
регулирования,
настроенного на модульный оптимум![]() частота среза,
частота среза, ![]() - частота сопряже-
- частота сопряже-
ния
асимптот, а запас по фазе на частоте
среза ![]() .
.
Таким образом, задачей синтеза контура при настройке на МО является выбор регулятора - последовательного корректирующего звена с такой передаточной функцией, чтобы разомкнутый контур имел передаточную функцию (6.6).