

5.3. Передаточные функции типовых замкнутых систем регулирования
Если разомкнутый контур имеет ЛАЧХ –0; -20; -60 ДБ/дек, то замкнутый контур имеет передаточную функцию:
(5.27)
Если разомкнутый контур имеет ЛАЧХ –20; -20; -60 ДБ/дек, то замкнутый контур имеет передаточную функцию:
(5.28)![]()
Если разомкнутый контур имеет ЛАЧХ –40; -20; -60 ДБ/дек, то замкнутый контур имеет передаточную функцию:
(5.29)![]()
Передаточные функции по ошибке от задающего воздействия в этих контурах регулирования:
(5.30)
(5.31)
(5.32)![]()
![]() .
.
Приведенные передаточные функции (5.265.31) полностью характеризуют динамические и точностные параметры контуров регулирования с типовыми ЛАЧХ.
5.4. Пример синтеза системы регулирования Задача
Требуется синтезировать одноконтурную замкнутую систему регулирования скорости на базе электропривода постоянного тока по схеме тиристорный преобразователь – двигатель (ТП-Д).
На рис. 5.11 приведена функциональная схема системы регулирования.
Технические требования к системе регулирования
1. Время переходного процесса отработки ступенчатого задающего воздействия tпп0,15 сек;
2. Перерегулирование при отработке ступенчатого задающего воздействия 15%;
3. Число колебаний в переходном процессе nк=1;
4. Установившаяся ошибка при отработке задающего воздействия з=0;
5. Установившаяся ошибка при компенсации возмущения Мс ; Мс=0;
Из
технических требований следует, что
система должна обладать астатизмом по
задающему воздействию ![]() и возмущению Мс.
и возмущению Мс.
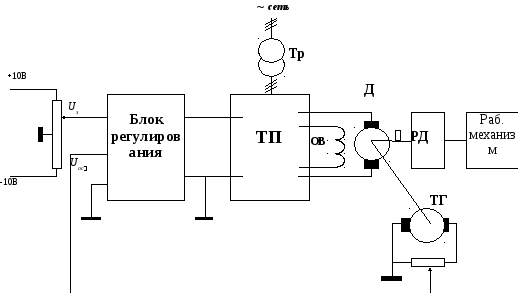
Рис. 5.11 Функциональная схема системы электропривода

Рис. 5.12 Исходная структурная схема системы электропривода
На рис. 5.12 приведена исходная структурная схема неизменяемой части системы регулирования (апериодическое звено второго порядка).
Электродвигатель в этой структурной схеме
Номинальная мощность Рн=4,7 кВт
Номинальное напряжение Uн=220 В
Номинальная скорость nн=1000 об/мин
Номинальная угловая скорость н=104 рад/с
Сопротивление якорной цепи Rяц=10 Ом
Коэффициенты момента и ЭДС См=Се=2,0
Суммарный момент инерции J=0,32 кгм2
Электроманитная постоянная времени якорной цепи Тя=Lя/Rя=0,01 с
Электромеханическая
постоянная времени ![]() с
с
Коэффициент передачи электродвигателя Кдв=1/Се=0,5
Передаточные функции двигателя по управляющему воздействию и по возмущению.
![]()
![]()
Тиристорный преобразователь (апериодическое звено)
Коэффициент усиления по напряжению Ктп=30
Постоянная времени Ттп=0,004 с
Усилитель (безынерционное звено)
Коэффициент усиления КУ=1
Обратная связь (безынерционное звено) Кос =0,1
Сигнал задания скорости Uз10 В
Возмущение по моменту нагрузки Мс Мн
Преобразуем исходную структурную схему системы электропривода, приведенную на рис. 5.12. Для этого возмущение Мс перенесем на управляющий вход электродвигателя и свернем его структурную схему. В результате получим расчетную структурную схему, приведенную на рис. 5.13.
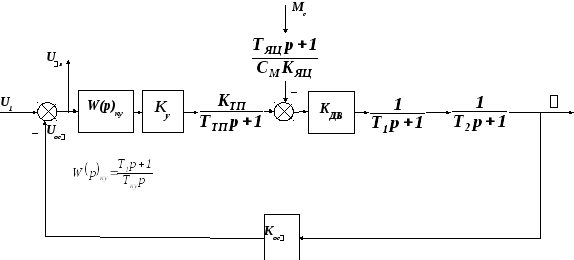
Рис. 5.13 Расчетная структурная схема системы электропривода
Постоянная
времени Т1
и Т2
находятся
при решении характеристического
уравнения передаточной функции двигателя
![]() Если
Если
Тм>4Тя, то решение дает два действительных отрицательных корня р1=1, р2=2, определяющих постоянные времени Т1=1/1, Т2=1/2, Т1=0,083 сек, Т2=0,012 сек.
Передаточная функция разомкнутой исходной системы имеет следующий вид
(5.33)![]()