

−
1.ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ
1.1.КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
1.1.1.Общие понятия механики.
Механика – раздел физики, который рассматривает простейшую форму движения материи – механическое движение.
Под механическим движением понимают изменение положения изучаемого тела в пространстве со временем относительно некоторого тела или системы тел, условно считаемых неподвижными. Такую систему тел вместе с часами, в качестве которых может быть выбран любой периодический процесс, называют системой отсчета. Систему отсчета часто выбирают из соображений удобства. Для математического описания движения с системой отсчета связывают систему координат, часто прямоугольную.
Простейшее тело в механике – материальная точка. Это тело, размерами которого в условиях данной задачи можно пренебречь.
Всякое тело, размерами которого пренебречь нельзя, рассматривают как систему материальных точек.
Механика подразделяется на кинематику, динамику и статику. Кинематика занимается геометрическим описанием движения, не изучая его причин. Динамика изучает законы движения тел под действием сил. Статика изучает условия равновесия тел.
1.1.2. Кинематика точки |
|
|
|
|
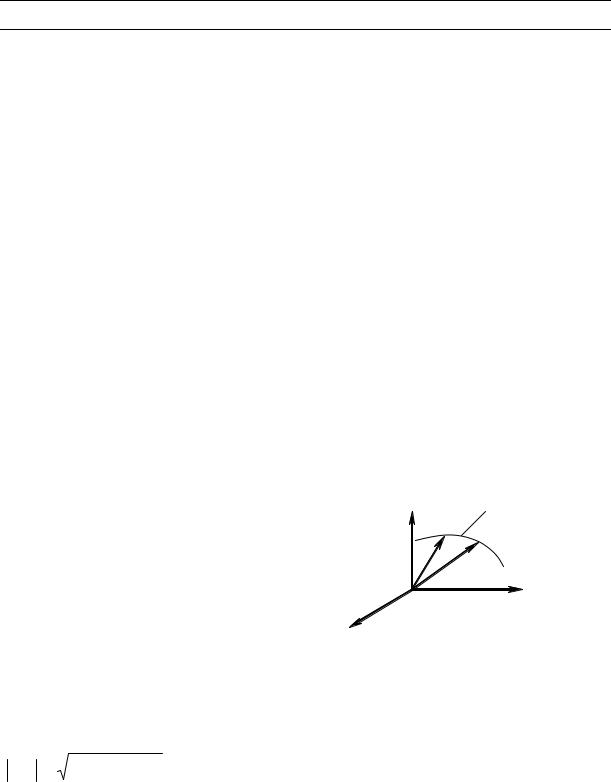
Кинематика изучает пространствен- |
|
|
r12 = r2 – r1 = r |
|
но-временное перемещение тел. Она опе- |
z |
|
||
|
|
|||
рирует такими понятиями, как переме- |
1 |
2 |
||
|
||||
щение r, путь S, время t, скорость |
r1 |
|
||
движения V, ускорение a. |
|
|
r2 |
|
Линию, которую описывает при сво- |
|
|
||
|
|
x |
||
ем движении материальная точка, назы- |
|
|
||
|
|
|
||
вают траекторией. По форме траектории |
y |
|
|
|
движения делятся на прямолинейные и |
Рис. 1.1.1 |
|||
криволинейные. Вектор r12, соединяю- |
||||
щий начальную 1 и конечную 2 точки, |
|
|
|
|
называют перемещением (рис. 1.1).
Каждому моменту времени t соответствует свой радиус-вектор r(t): r(t) = x2 + y2 + z2 .
Таким образом, движение точки может быть описано векторной функцией |
|
r(t)= x(t)i + y(t)j + z(t)k , |
(1.1.1) |
которая определяет векторный способ задания движения, или тремя скалярными функциями
|
− |
x = x(t); y = y(t); z = z(t), |
(1.1.2) |
которые называют кинематическими уравнениями. Они определяют задание движения координатным способом.
Движение точки будет также определено, если для каждого момента вре-
мени будет установлено положение точки на траектории, т.е. зависимость |
|
S = f (t). |
(1.1.3) |
Она определяет задание движения естественным способом.
Каждая из указанных формул представляет собой кинематический закон движения точки.
1.1.3. |
Скорость |
|
|
|
|
||
Если моменту времени |
t1 |
соответствует радиус-вектор r1, а |
t2 – r2, то за |
||||
промежуток |
|
t = t2 − t1 |
тело получит перемещение r = r2 −r1. |
В этом слу- |
|||
чае средней скоростью |
V |
за |
t называют величину |
|
|||
V = |
r , |
|
|
|
|
|
(1.1.4) |
|
t |
|
|
|
|
|
|
которая по отношению к траектории представляет секущую, проходящую |
|||||||
через точки 1 |
и 2. Скоростью в момент времени t называют вектор |
||||||
V = lim |
r |
= dr . |
|
|
|
(1.1.5) |
|
t→0 |
t |
dt |
|
|
|
|
|
Из этого определения следует, что скорость в каждой точке траектории направлена по касательной к ней. Из (1.1.5) следует, что проекции и модуль вектора скорости определяются выражениями:
V = dx |
; |
V |
= dy ; |
V |
= dz ; V = |
V2 |
+ V2 |
+ V2 . |
(1.1.6) |
|
X |
dt |
|
Y |
dt |
Z |
dt |
X |
Y |
Z |
|
|
|
|
|
|
|
|
|
|||
Если задан кинематический закон движения (1.3), то модуль вектора скорости определится так:
|
V |
|
= V = |
lim |
r |
= lim |
|
r |
|
|
= lim |
S |
= dS |
(1.1.7) |
|
|
|
|
|||||||||||
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
t→0 |
t |
t→0 |
|
t |
t→0 |
t |
dt |
|
||
Таким образом, зная закон движения (1.1.1), (1.1.2), (1.1.3) можно вычислить вектор и модуль вектора скорости и, наоборот, зная скорость из формул (1.1.6), (1.1.7), можно вычислять координаты и путь.
1.1.4. Ускорение
При произвольном движении вектор скорости непрерывно меняется. Величина, характеризующая быстроту изменения вектора скорости, называется ускорением a.
Если в момент времени t1 скорость точки V1, а при t2 – V2, то приращение скорости составит V = V2 − V1 (рис. 1.1.2). Среднее ускорение при
этом

|
|
|
|
|
|
|
|
− |
a = |
|
Vt , |
|
|
|
(1.1.8) |
||
а мгновенное |
|
|||||||
a = |
dV |
= |
d2r |
|
||||
|
|
|
|
|
. |
(1.1.9) |
||
|
dt |
|
dt |
2 |
||||
|
|
|
|
|
|
|
||
Для проекций и модуля ускорений имеем:
ax = |
dV |
d2x |
; ay = |
dV |
d2y |
; az = |
dV |
d2z |
; |
||
x = |
2 |
x = |
2 |
zx = |
dt2 |
||||||
|
dt |
dt |
|
dt |
dt |
|
dt |
(1.1.10) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
a =  a22 + a2y + a2z
a22 + a2y + a2z
Если задан естественный способ движения, то ускорение можно определить и так. Скорость меняется по величине и по направлению, приращение скорости
V |
раскладывают |
на |
две |
величины: |
Vτ − направленный вдоль |
V (приращение скорости |
|||
по величине) и Vn – направленный перпендикулярно
α |
V1 |
|
V |
||
|
||
|
V2 |
|
|
V2 |
|
|
Рис. 1.1.2 |
V (приращение |
скорости |
по направлению), т.е. |
V1 |
Vτ |
|
||
V = Vτ + |
Vn |
(рис. 1.3). |
|
M |
|
||
|
|
α |
p |
||||
a = dVτ |
+ dVn |
(1.1.11) |
|
|
N |
||
R |
|
V |
|||||
dt |
dt |
|
|
|
|||
aτ = dVτ . |
|
(1.1.12) |
α |
|
0 |
|
|
dt |
|
|
|
|
|
V2 |
|
Тангенциальное (касательное) ускорение харак- |
|
|
|||||
|
|
|
|||||
теризует быстроту изменения V по величине. |
|
Рис. 1.1.3 |
|
||||
an = dVn , |
|
(1.1.13) |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
нормальное (центростремительное ускорение) характеризует быстроту из- |
|||||||
менения V по направлению. Для вычисления an |
рассмотрим |
0MN и MP0 |
|||||
при условии малого перемещения точки по траектории. Из подобия этих треугольников находим P0:MP = MN:0M
V |
|
S |
|
|
|
|
V |
|
|
|
|
dV |
V2 |
|
|
|||
n = |
|
|
|
|
V |
= |
|
|
S; |
a |
n |
= |
|
n |
= |
|
. |
(1.1.14) |
|
|
|
|
|
|
|
|
|||||||||||
V |
|
R |
|
|
n |
|
R |
|
|
|
|
dt |
R |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Полное ускорение в этом случае определится так: |
|
|||||||||||||||||
a = a |
2 |
+ a2 |
= |
dV 2 |
|
V2 |
2 |
|
|
|
|
(1.1.15) |
||||||
|
|
|
+ |
|
|
. |
|
|
|
|
||||||||
|
τ |
|
n |
|
|
dt |
|
R |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1.1.5. Примеры
Равнопеременное прямолинейное движение. Это движение с постоянным ускорением (a = const). Из (1.1.8) находим