

МИНИСТЕРСТВО ЦИФРОВОГО РАЗВИТИЯ, СВЯЗИ И МАССОВЫХ КОММУНИКАЦИЙ РОССИЙСКОЙ ФЕДЕРАЦИИ
ордена Трудового Красного Знамени федеральное государственное бюджетное образовательное учреждение высшего образования
МОСКОВСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
СВЯЗИ И ИНФОРМАТИКИ
Факультет "Радио и телевидение"
Кафедра "Радиотехнические системы "
Курсовая работа
по дисциплине: «Радиоавтоматика»
на тему: "Расчёт и моделирование системы АСН"
Исполнитель:
Студент БРА2101
Епифанов Георгий Юрьевич
Проверила: О. Н. Минаева
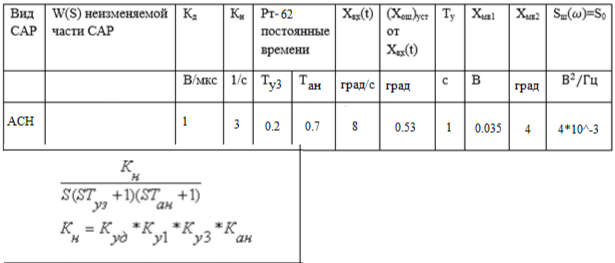
Исходные данные системы
Теоретические сведения об асн
Современные радиоприборы содержат несколько систем управления, обеспечивающих оптимальное выделение информации из радиосигнала. В импульсной РЛС система автоматического сопровождения цели по направлению (АСН) включает автоматическую регулировку усиления (АРУ) для стабилизации уровня сигнала, автоматическую подстройку частоты (АПЧ) для поддержания промежуточной частоты и систему слежения за дальностью (АСД) для измерения задержки сигнала. Согласованная работа этих систем позволяет точно определять параметры движения цели.
Структурная схема дальномера импульсной РЛС:
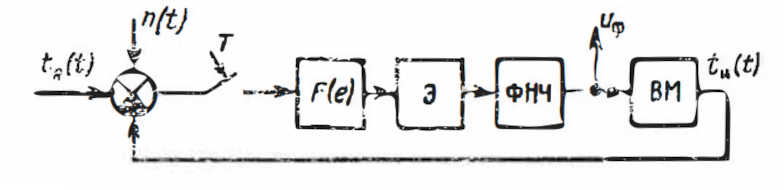
В одноканальных моноимпульсных РЛС угловое положение цели определяется сравнением амплитуд и фаз сигналов двух антенн, формирующих перекрывающиеся диаграммы направленности. Суммарная диаграмма используется для приема и передачи, а разностная только для приема. Выделение сигналов выполняется с помощью волноводных гибридных схем, после чего они усиливаются и смешиваются в фазочувствительном детекторе.
При отклонении цели от равносигнального направления (РСН) на выходе детектора появляется сигнал угловой ошибки, полярность которого указывает на знак отклонения. Этот сигнал преобразуется и подается на исполнительный двигатель, который поворачивает антенны, уменьшая ошибку. Дискриминатор угла рассогласования формируется устройствами от антенн до фазового детектора и характеризуется крутизной пеленгационной характеристики.
Функциональная схема АСН обеспечивает идентичность каналов, сохраняя когерентность сигналов и высокую точность управления.
2. Расчет динамических звеньев первого порядка системы АСН
Неизменяемая часть передаточной функции, согласно варианту, выглядит следующем образом:
Разбиваем передаточную функцию неизменяемой части системы на типовые динамические звенья первого порядка
 – первое,
интегрирующее звено
– первое,
интегрирующее звено
 – второе,
инерционное звено
– второе,
инерционное звено
 -
третье, инерционное звено
-
третье, инерционное звено
2.1 Расчет интегрирующего звена без ООС
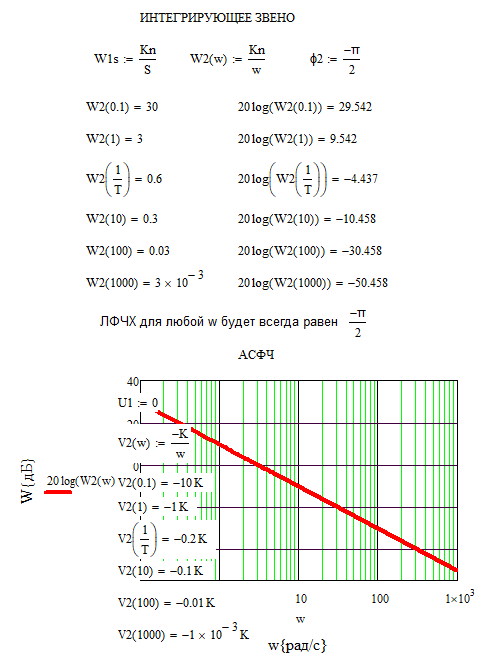

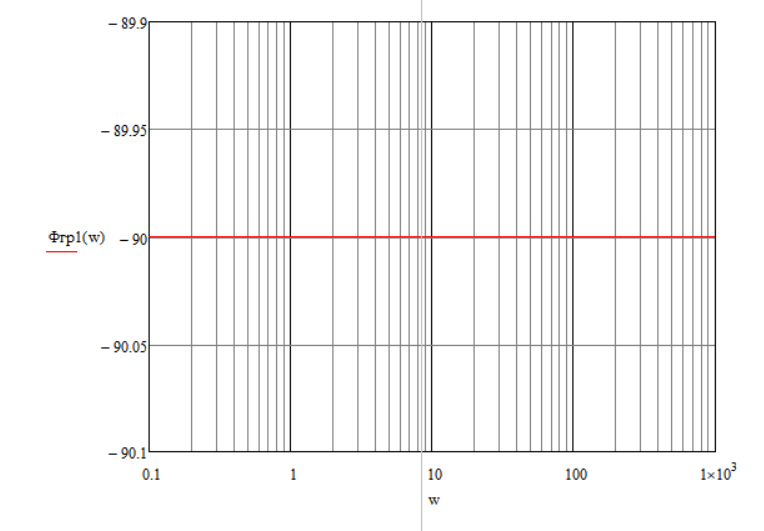
Рисунок 2 – ЛАЧХ и ЛФЧХ интегрирующего звена
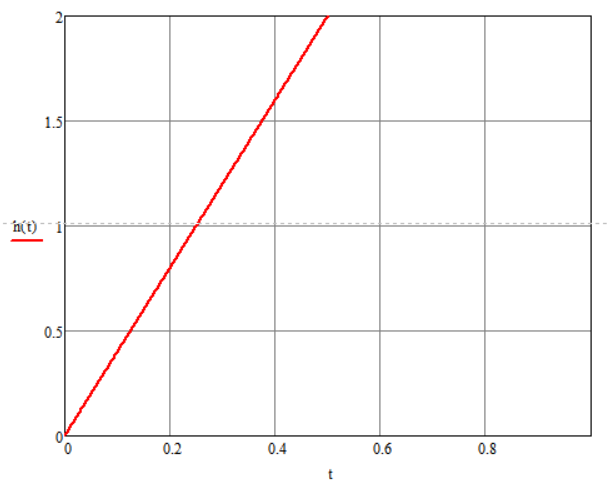
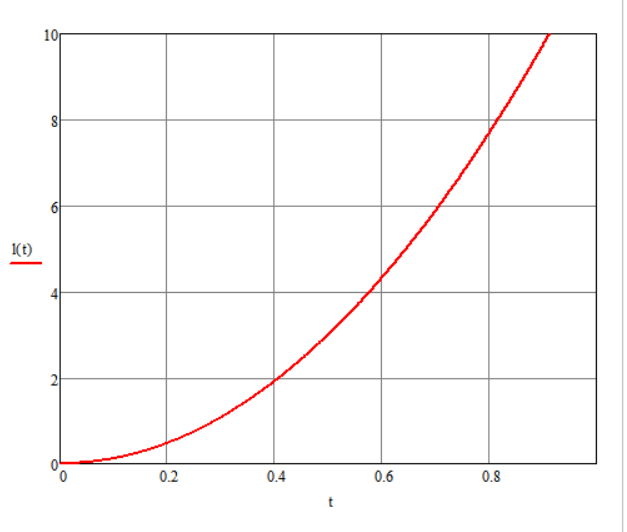
Рисунок 3 – Реакция на единичный импульс интегрирующего звена и реакция на линейно возрастающее воздействие
Рисунок 3 – Годограф интегрирующего звена
2.2 Расчет первого инерционного звена без ООС
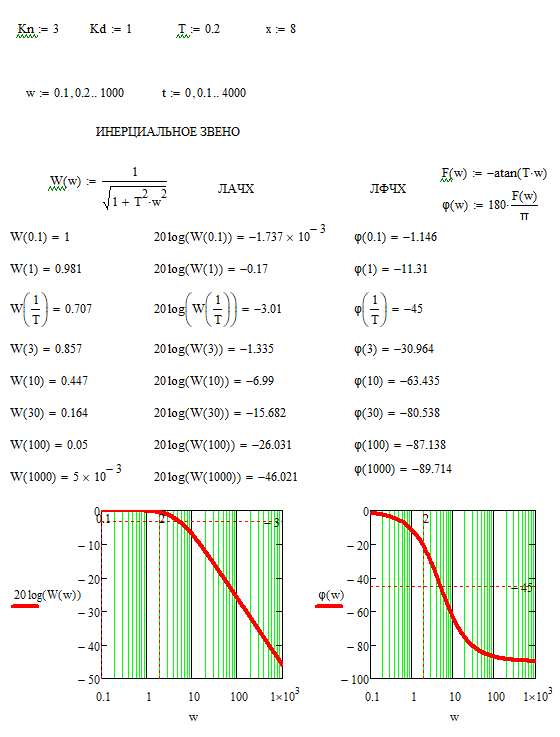

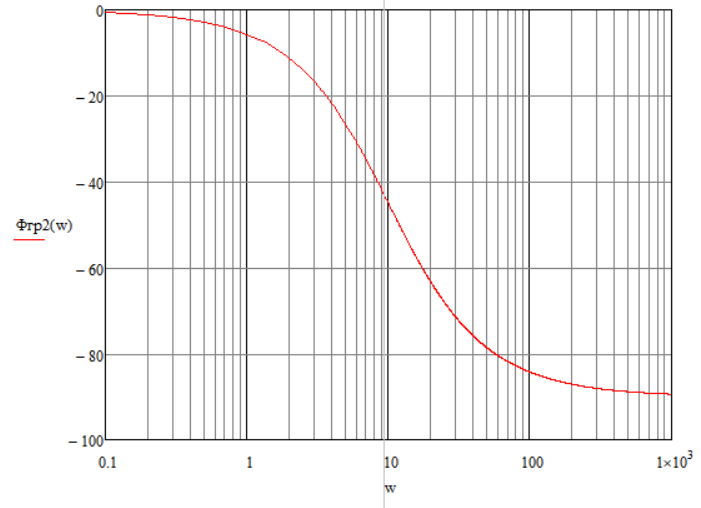
Рисунок 4 – ЛАЧХ инерционного звена 1 и ЛФЧХ инерционного звена
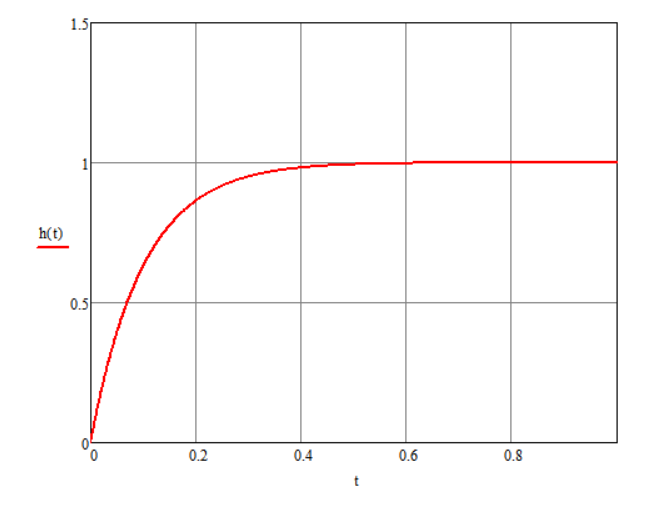

Рисунок 5 – Реакция на единичный импульс 1 инерционного звена и реакция на линейно возрастающее воздействие
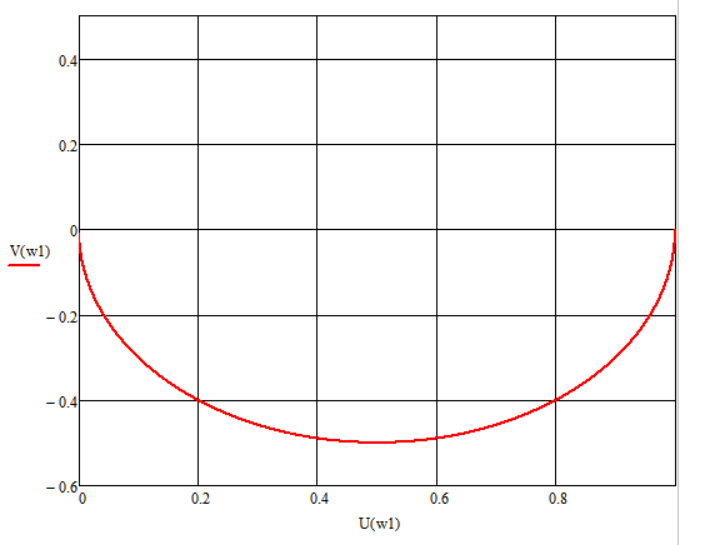
Рисунок 6 – Годограф инерционного звена
2.3 Расчет второго инерционного звена без ООС
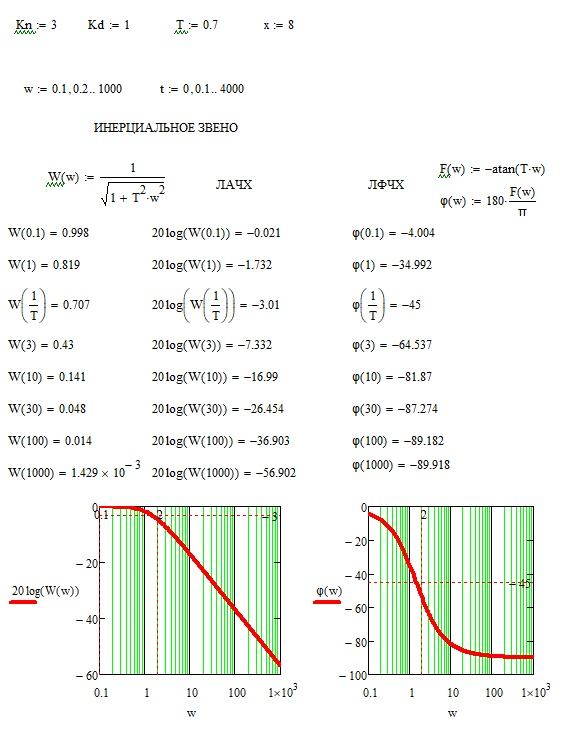
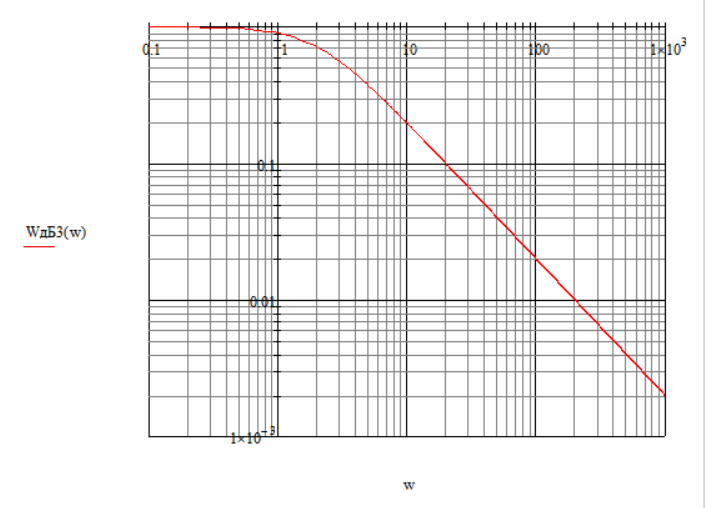
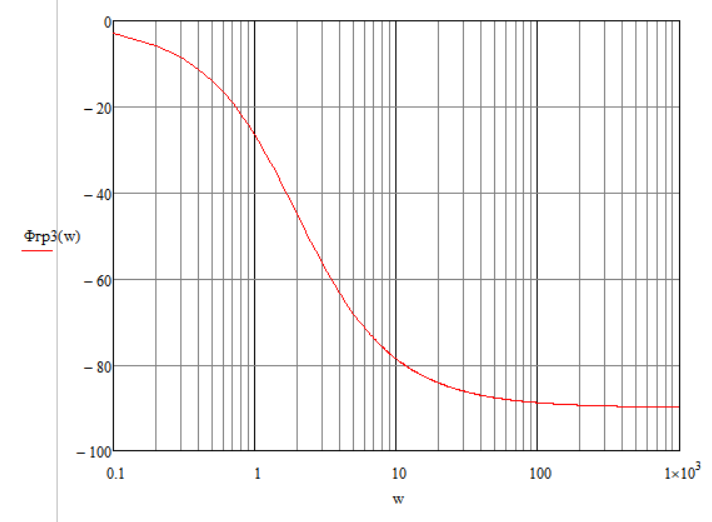
Рисунок 7 – ЛАЧХ инерционного звена и ЛФЧХ 2 инерционного звена
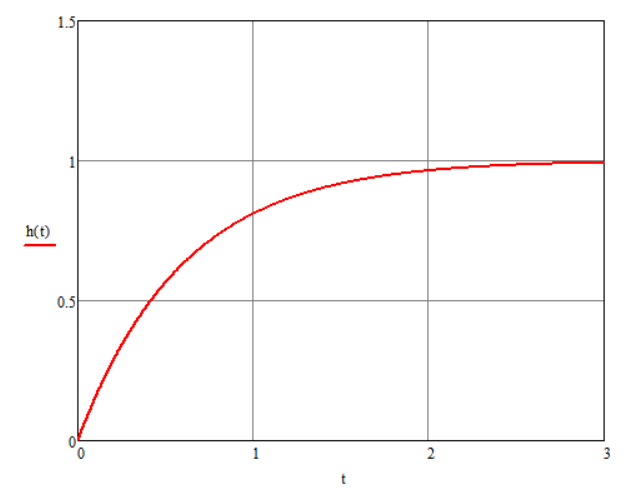
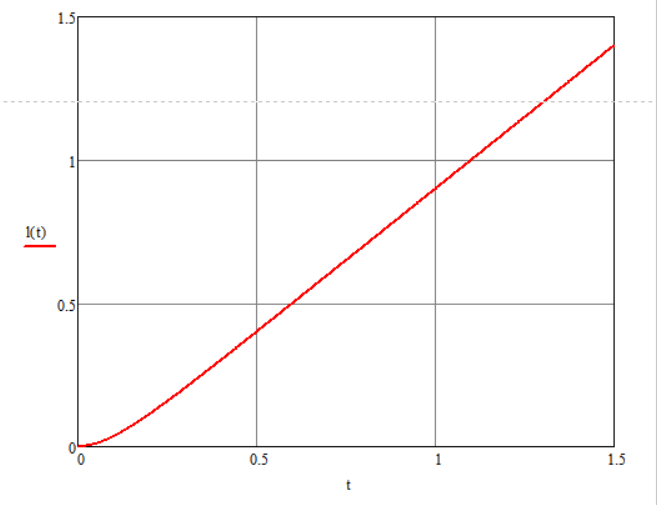
Рисунок 8 – Реакция на единичный импульс инерционного звена и реакция на линейно возрастающее воздействие инерционного 2 звена
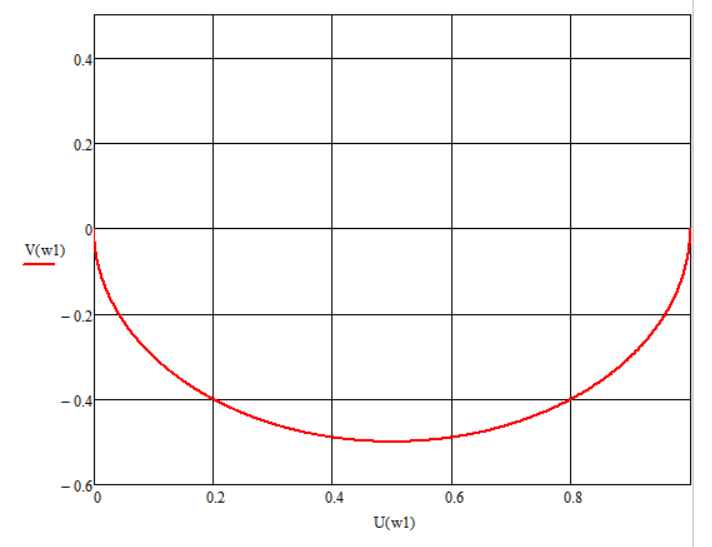
Рисунок 9 – Годограф 2 инерционного звена