

Методические указания радиоавтоматика
.pdfФЕДЕРАЛЬНОЕ АГЕНТСТВО СВЯЗИ
Федеральное государственное образовательное бюджетное учреждение высшего профессионального образования
Московский Технический Университет Связи и Информатики
Кафедра радиотехнических систем
Методические указания
по дисциплине
Радиоавтоматика
с использованием программного обеспечения
Matlab с расширением Simulink
Москва 2012
План УМД на 2011/2012 уч.г.
Методические указания
по дисциплине
Радиоавтоматика
с использованием программного обеспечения
Matlab с расширением Simulink
Составители: Минаева О.Н., ст. пр. Горячева Л.Я., ст.пр.
Методические указания, рассчитанные на студентов по направлению 210400 Радиотехника.
Издание утверждено советом факультета РиТ. Протокол № |
от 15.03.12 |
Издание утверждено кафедрой РТС. Протокол № 8 от 07.03.12 |
|
Рецензент Ю.С. Шинаков, д.т.н., профессор
2
Оглавление |
|
|
1. Введение............................................................................................................ |
4 |
|
2. Радиоавтоматические системы ....................................................................... |
5 |
|
2.1 |
Система АСН............................................................................................... |
5 |
2.2 |
Система АСД ............................................................................................... |
8 |
2.3 |
Система АПЧ............................................................................................. |
12 |
2.4 |
Модели автоматических систем управления ......................................... |
14 |
3. Пункты на расчет автоматической системы и ее исследование на ПК.... |
16 |
|
Приложение 1 ..................................................................................................... |
42 |
|
Приложение 2. .................................................................................................... |
56 |
|
П.2.1 Начало работы ....................................................................................... |
56 |
|
П.2.2 Библиотеки Matlab Simulink, используемые в работе....................... |
57 |
|
Приложение 3 ..................................................................................................... |
64 |
|
Приложение 4 ..................................................................................................... |
71 |
|
Список литературы: ........................................................................................... |
76 |
|
3
Цикл лабораторных работ по дисциплине «Радиоавтоматика»
1. Введение
Целью цикла расчетно-экспериментальных работ по радиоавтоматике является формирование современного инженерного подхода к проектированию систем управления, при котором аналитические методы подкрепляются и дополняются экспериментальными исследованиями систем на вычислительных машинах. Такой подход расширяет возможности проектировщика и позволяет упростить процесс нахождения оптимального варианта построения системы или оптимального режима ее работы. Приобретение навыков комбинированного проектирования особенно важно для инженеров – радистов, так как все радиоавтоматические системы в общем случае являются нелинейными и нестационарными, а для таких систем в настоящее время нет точных аналитических методов расчета.
Цикл работ объединяет в себе все основные этапы проектирования радиоавтомарических систем.
I этап (ему соответствуют пункты 1, 2, 3 и 5 проводимого далее расчетного задания). Ознакомление с назначением и особенностями проектируемой радиоавтоматической системы и исследование ее динамических свойств при заданных исходных параметрах ее элементов. Совокупность звеньев, образующих разомкнутую часть такой системы, составляет так называемую неизменяемую часть системы с передаточной функцией Wн (s) и характеризует ее начальную структуру и свойства. Цель этапа – установить, отвечает ли исходная система предъявляемым к ней техническим требованиям и проанализировать возможности простейших способов измерения ее характеристик (за счет вариации коэффициента усиления Кн).
II этап (пункт 7 задания). Поиск подходящих значений параметров системы ( определение таких ее параметров), при которых показатели качества работы системы, определяющие степень колебательности переходных процессов, точность и быстродействие, имеют требуемые значения при заданных уровнях и типах полезного воздействия Xвх в (t) и мешающих воздействиях Xм в(t). На этом этапе осуществляется коррекция исходной системы с передаточной функцией Wн(S) путем включения в систему динамических звеньев коррекции с передаточной функцией Wкорр(s).
III этап (пункт 9 задания). Исследование влияния на работоспособность и динамические свойства скорректированной системы имеющихся в ее составе нелинейных звеньев. В связи с трудностями аналитических расчетов основной вес подобных исследований приходится на машинный эксперимент (пункт 10 задания).
4
IV этап (пункт 11 задания). Исследование влияния дискретизации входного сигнала по времени, всегда имеющего место в импульсных радиотехнических устройствах, на динамические свойства радиоавтоматических систем.
V этап (пункт 13 задания). Исследование влияния на систему управления случайных воздействий, не только снижающих точность работы системы, но и приводящих в отдельных случаях к нарушению режима слежения.
Каждая экспериментальная работа цикла, кроме первой (ознакомление с прикладным пакетом Matlab с расширением Simulink), соответствует определенному этапу проектирования. При этом цель такого экспериментального исследования состоит в уточнении результатов предварительных аналитических расчетов, анализе откликов системы в различных точках контура управления на внешние воздействия и в установлении подходящих значений параметров синтезируемой системы.
Для большей конкретности и физической наглядности расчетов и экспериментального исследования взяты радиоавтоматические системы, входящие в контур управления импульсной радиолокационной станции (РЛС).
2. Радиоавтоматические системы
2.1 Система АСН
Современные радиоприборы являются сложными устройствами, в которых для поддержания оптимальных условий выделения полезной информации из принятого радиосигнала используют обычно несколько одновременно действующих систем управления. Например, в импульсной радиолокационной станции система автоматического сопровождения цели по направлению (АСН) содержит следующие замкнутые радиоавтоматические системы: система автоматической регулировки усиления (АРУ), стабилизирующая уровень сигнала на выходе УПЧ; система автоматической подстройки частоты (АПЧ), поддерживающая одно и то же значение некоторой промежуточной частоты, система автоматического слежения за дальностью до цели (АСД), которая осуществляет измерение задержки приходящего сигнала относительно зондирующего импульса. Только согласованная работа всех этих систем позволяет с достаточной точностью определять все параметры движения цели.
Чтобы лучше уяснить себе взаимодействие отдельных радиотехнических элементов в РЛС определенного типа (класса) и установить роль, которую они играют в контурах радиоавтоматических систем, рассмотрим более подробно принцип действия и блок-схему моноимпульсной РЛС. Для простоты описания будем р
ссматривать только один канал РЛС, например, АСН для слежения за целью в вертикальной плоскости [З].
5
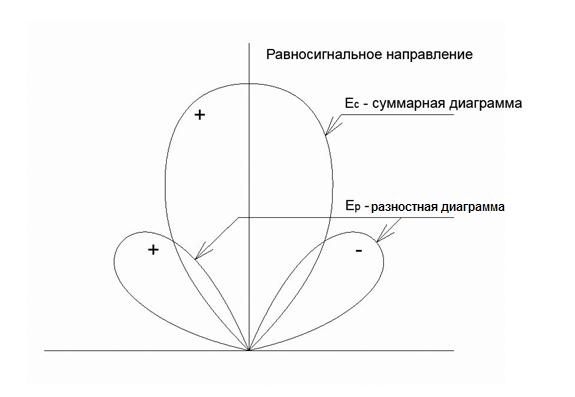
В одноканальных моноимпульсных РЛС информация об угловом положении цели извлекается для каждого отраженного от нее импульса путем сравнения амплитуд и фаз сигналов, принятых одновременно двумя антеннами, с помощью которых формируются две перекрывающихся диаграммы направленности Е1(θ) и Е2(θ). Максимумы диаграмм отклонены от оптической оси антенной системы (так называемого равносигнального направления - РСН) в разные стороны на угол ±ε. Такое построение антенной системы позволяет получить суммарную и разностную диаграмму направленности
(рис.1.1).
Суммарная диаграмма Еc(θ) формируется при синфазном включении облучателей обеих антенн и используется как для приема, так и для передачи, а разностная диаграмма Ер(θ) формируется при противофазном включении облучателей и используется только для приема.
Рис.1.1
Выделение суммарного и разностного сигналов осуществляется в высокочастотной части приемного устройства с помощью волноводной гибридной схемы, выполняемой в виде кольцевого волноводного моста (КВМ) или двойного волноводного тройника. Сигналы, принятые по суммарной и разностной диаграммам, раздельно преобразуются и усиливаются, а затем смешиваются в фазочувствительном детекторе.
При отклонении цели от равносигнального направления на некоторый угол напряжение на выходе этого детектора пропорционально сигналу угловой ошибки. Полярность напряжения на выходе детектора характеризует
6
знак угловой ошибки. Если фаза разностного сигнала совпадает с фазой суммарного сигнала, то угловой ошибке приписывается положительное значение. В противном случае – отрицательное.
Рис.1.2
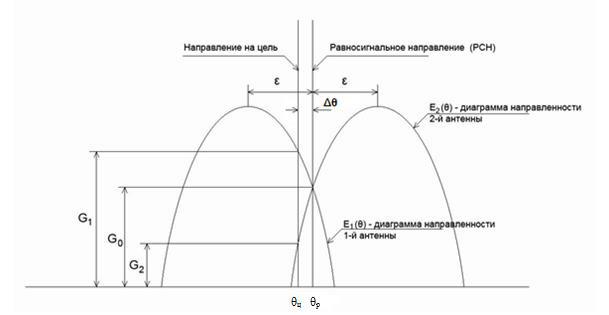
θц= θр+Δθ, в дальнейшем θр= θ0
Сигналы, принятые первой и второй антеннами (диаграммами направленности) можно записать следующим образом (рис.1.2):
Е1(θ)G1= Е(θ0)G0+ Kп ΔθE(θ0)G0= Е(θ0)G0(1+Kп Δθ)*
Е2(θ)G2= Е(θ0)G0 - Kп ΔθE(θ0)G0= Е(θ0)G0(1- Kп Δθ)**
где G0, G1 и G2- коэффициенты усиления антенн соответственно в направлении оптической оси антенной системы и на цель при отклонении цели от равносигнального направления на угол Δθ;
Kп=tg(γ) - крутизна пеленгационной характеристики (рис.1.3).
Из * и ** следует, что суммарный и разностный сигналы Еc и Ер определяются как
Ес= Е1(θ)G1+ Е2(θ)G2=2 Е(θ0)G0
Ер= Е1(θ)G1 –Е2(θ)G2=2 Е(θ0) Kп Δθ
В многоимпульсных РЛС сигнал Ер нормируется относительно Ес так, что напряжение сигнала ошибки равно Е=Ес−Ер или, если отсчет ведется относительно РСН,
7
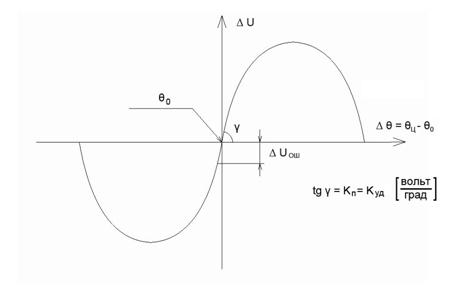
U= Kп(θц−θ0)= KпΔθ
Рис.1.3
С помощью регулирующей части сигнал ошибки усиливается, преобразуется в сигнал управления исполнительным двигателем, который через редуктор поворачивает блок антенн в направлении уменьшения угловой ошибки. При совмещении РСН с направлением на цель сигнал ошибки равен нулю.
С точки зрения системы АСН, совокупность всех устройств и блоков, начиная от антенн и кончая фазовым детектором с входящими в него сглаживающими цепями, образует дискриминатор угла рассогласования, статистической характеристикой которого является пеленгационная характеристика, а коэффициент передачи дискриминатора Куд=Кп. Более подробно с работой АСН можно ознакомиться в [2, с.28-33; 3,с. 13-16; 4,с. 156-168].
На рис.1.4 изображена укрупненная функциональная схема моноимпульсной РЛС слежения по углам в одной плоскости. На схеме показаны цепи системы АРУ, обеспечивающей идентичность суммарного и разностного каналов, что позволяет сохранять с высокой точностью когерентность между сигналами этих каналов.
2.2Система АСД
Вимпульсной РЛС измерение дальности АСД осуществляется следующим образом. Генерируемая в синхронизаторе последовательность импульсов один раз за период Т запускает с помощью модулятора передатчик, и в эфир излучается последовательность так называемых тактовых или зондирующих импульсов. Отразившийся от цели импульс принимается антенной системой РЛС и попадает как в суммарный, так и в разностный каналы. Система АСД использует для измерения дальности только суммарный канал. За-
держка τс отраженного импульса, называемого импульсом цели, относительно момента излучения тактового импульса характеризует дальность до цели.
8
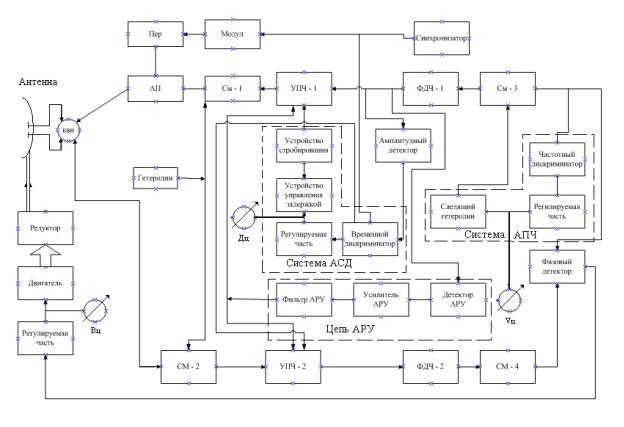
Рис. 1.4
9

Рис. 1.5
10