

Детали машин / Konspekty_lekcii / Конспекты лекций / Лекция 18. Планетарные зубчатые передачи
.pdfЛекция 18 ПЛАНЕТАРНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
План лекции
1.Общие сведения.
2.Передаточное отношение.
3.Схемы планетарных передач.
4.Вращающие моменты на основных звеньях, силы в зацеплении.
5.Расчет планетарных передач на прочность
1.Общие сведения
Планетарными называют передачи, имеющие зубчатые колеса I с подвижными осями. Наиболее распространенная простая однорядная планетарная передача (рис.18.1), состоит из центрального колеса а с наружными зубьями, неподвижного центрального колеса b с внутренними зубьями, сателлитов g – колес с наружными зубьями, зацепляющихся одновременно с а и b (здесь число сателлитов nw=3), и водила h, на котором закреплены оси сателлитов. Водило соединено с тихоходным валом. В планетарной передаче
одно колесо остановлено (соединено с корпусом).
b |
|
|
b |
|
q |
|
|
q |
|
q |
|
|
|
||
h |
h |
|
|
|
h |
||
|
|
|
|
|
|
|
а |
а |
h |
|
|
a |
|
|
|
|
|
|
|
|
|
|
a |
Рис.18.1.
При неподвижном колесе b вращение колеса а вызывает вращение сателлита g относительно собственной оси, а обкатывание сателлита по колесу b перемещает его ось и вращает водило h. Сателлит таким образом совершает вращение относительно водила и вместе с водилом вокруг центральной оси, т.е. совершает движение, подобное движению планет. Поэтому передачи называют планетарными.
При неподвижном колесе b движение передают чаще всего от колеса а к водилу h; возможна передача движения от водила h к колесу а.
Основными звеньями называют такие, которые нагружены внешним вращающим моментом. Для передачи, изображенной на рис. 18.1, основные звенья а, b, h, т.е. два центральных колеса (2К) и водило h. Такие передачи условно обозначают 2К - h. Внешние моменты на звеньях обозначают: Та, Ть,
Тh.
1
В планетарных передачах применяют не только цилиндрические, но и конические колеса с прямым или косым зубом.
Если в планетарной передаче подвижны все звенья, т.е. оба колеса и водило, то такую передачу называют дифференциальной. С помощью дифференциального механизма можно суммировать движение двух звеньев на одном или раскладывать движение одного звена на два других. Например, в дифференциале ведущего моста автомобиля движение от водила h передают одновременно колесам а и h, что позволяет при повороте одному колесу вращаться быстрее другого.
Достоинства планетарных передач.
1.Малые габариты и масса вследствие передачи мощности по нескольким потокам, число которых равно числу сателлитов, При этом нагрузка в каждом зацеплении уменьшена в несколько раз.
2.Удобство компоновки в машинах благодаря соосности ведущего и ведомого валов.
3.Работа с меньшим шумом по сравнению с обычными зубчатыми передачами, что связано с меньшими размерами колес и замыканием сил в механизме. При симметричном расположении сателлитов силы в передаче взаимно уравновешиваются.
4.Малые нагрузки на валы и опоры, что упрощает конструкцию опор и снижает потери в них.
5.Возможность получения больших передаточных отношений при небольшом числе зубчатых колес и малых габаритах.
Недостатки.
1.Повышенные требования к точности изготовления и монтажа пере-
дачи.
2.Большее число деталей (подшипников),
более сложная сборка.
3. Для нарезания колес с внутренними зубьями требуются зубодолбежные станки, парк которых меньше, чем зубофрезерных.
Планетарную передачу применяют как: редуктор в силовых передачах и приборах; коробку передач, передаточное отношение в которой изменяют путем поочередного торможения различных звеньев (например, водила или одного из колес); дифференциал в автомобилях, тракторах, станках, приборах.
Часто применяют планетарную передачу, совмещенную с электродвигателем (мотор-редуктор, мотор-колесо).
2. Передаточное отношение
При определении передаточного отношения планетарной передачи используют метод остановки водила (метод Виллиса). По этому методу всей планетарной передаче мысленно сообщают дополнительно вращение с угло-
вой скоростью водила ω h , но в обратном направлении. При этом водило как
2

бы останавливается, а закрепленное колесо освобождается. Получается так называемый обращенный механизм, представляющий собой обычную непланетарную передачу, в которой геометрические оси всех колес неподвижны. Сателлиты при этом становятся промежуточными (паразитными) колесами, т.е. колесами, не влияющими на передаточное отношение механизма. Передаточное отношение в обращенном механизме определяют как в двухступенчатой передаче с одним внешним и одним внутренним зацеплением.
Здесь существенное значение имеет знак передаточного отношения. Передаточное отношение и считают положительным, если в обращенном механизме ведущее и ведомое звенья вращаются в одну сторону, и отрицательным, если в разные стороны. Так, для обращенного механизма передачи при ведущем колесе а и ведомом колесе b, (см. рис. 18.1), имеем:
|
|
|
ωa |
|
u u1u2 |
|
|
||
|
||||
|
|
|
ωg |
|
|
|
|
ωgωb
|
|
|
|
( zg |
/ za )(zb / zg ) zb / za , |
|
||
|
|
|
где через z обозначены числа зубьев соответствующих колес.
В рассматриваемом обращенном механизме знак минус показывает,
что колеса g и b вращаются в обратную сторону по отношению к колесу а.
С другой стороны, мысленная остановка водила при передаче ]движения от а к b равноценна вычитанию его угловой скорости ω h из угловых скоростей колес. Тогда для обращенного механизма этой передачи
uabh (ωa ωh ) /(ωb ωh ) zh / za ,
где (ωa ωh )и(ωb ωh ) – соответственно угловые скорости колес а и b относительно водила h; zh и za – числа зубьев колес а и b;
Верхний индекс (h) в обозначении передаточного отношения соответствует обозначению невращающегося звена, нижние (а и b) –1 соответственно ведущему и ведомому звеньям.
Таким образом, по формуле (18.1) вычисляют передаточное отношение для планетарной передачи, у которой неподвижно водило А( ω h = 0), колесо а
является ведущим, колесо b – ведомым. В планетарной передаче любое основное звено может быть остановлено. Для планетарной передачи, у которой
колесо b закреплено в корпусе неподвижно ( ωh 0 ), колесо а является ведущим, а водило h – ведомым, из формулы (18.1) получим
(ωa ωh ) /(0 ωh ) zb / za или ( ωa / ωh ) 1 zb / za .
Отсюда следует
uahh ωa / ωh 1 zh / za .
Для планетарной передачи, у которой колесо Ь закреплено в корпусе неподвижно ( ωb 0 ), водило h является ведущим, а колесо а – ведомым, имеем
3
uhab ωh / ωa 1/(ωa / ωh ) 1/(1 zb / za ).
Таким образом, в зависимости от остановленного звена можно получить различные значения передаточного отношения планетарной передачи. Это свойство планетарных передач используют в коробках передач.
3. Схемы планетарных передач
Существует много различных типов планетарных передач. Наиболее широко применяют однорядную планетарную передачу, схема которой показана на рис. 18.1. Это передача 2K – h, она конструктивно проста, имеет малые размеры. Находит применение в силовых и вспомогательных приводах. КПД передачи η = 0,96 – 0,98 при ubah = 3 – 8.
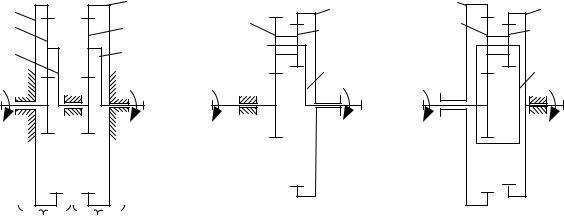
Для получения больших передаточных отношений в силовых приводах применяют многоступенчатые планетарные передачи. На рис. 18.2, а плане-
тарная передача составлена из двух последовательно соединенных одноряд-
ных планетарных передач с передаточными отношениями и1, и2. Общее передаточное отношение и и КПД η в этом случае
и = и1 и 2≤64; η η1η2 = 0,92–0,96.
zb1 |
|
zq1 |
|
h1 |
|
na1 |
zа1 |
|
zb2 |
|
zq |
|
zb |
|
z |
|
|
|
||
q 2 |
|
|
z f |
||
|
|
|
|
||
h2 |
|
|
|
h |
|
|
|
|
|
|
|
nh2 |
na |
|
za |
nh |
|
zа2 |
|
|
|
|
|
zb |
|
z |
zq |
|
e |
|
z f |
|
|
|
|
|
|
h |
na |
za |
ne |
|
|
|
|
|
|
|
|
|
|
|
|
Ступень 1 Ступень 2 |
|
|
||||||||
|
|
|
|
а |
б |
в |
||||
|
|
|
|
|
|
|
|
|
Рис.18.2 |
|
На рис. 18.2, б показана схема планетарной передачи с двухрядным (двухвенцовым) сателлитом. Основные звенья: а,b – два центральных колеса и водило h, передача 2K – h. Передаточное отношение при передаче дви-
жения от колеса а к водилу h и закрепленном колесе b ( ωb 0 ).
uhab ωa / ωh na / nh 1 zb zg /(z f za ).
В этой передаче uhab = 3–19 при η = 0,95 – 0,97.
На рис. 18.2, в показана схема планетарной передачи 3К. Основные звенья a, b, e – три центральных колеса. Водило h служит только для удержа-
4
ния сателлитов. Передаточное отношение при передаче движения от колеса а к колесу е и закрепленном колесе b ( ωb 0)
b |
|
ωa |
|
na |
(1 zb / za ) |
|
|
||||||||
uae |
|
|
|
|
|
|
1 z |
|
|
|
|
|
|
|
) . |
ω |
e |
n |
e |
b |
z |
g |
/(z |
f |
z |
e |
|||||
|
|
|
|
|
|
|
|
|
|
||||||
В этой передаче uaeb |
= 16 –200 (до 1600) при |
|
η = 0,9–0,7(0,4). |
||||||||||||
4. Вращающие моменты на основных звеньях
Для расчета зацепления на прочность, вычисления сил в зацеплении для последующего расчета подшипников, расчета соединения неподвижного колеса с корпусом необходимо знать вращающие моменты на основных звеньях.
Дальнейшие рассуждения проведем для планетарной передачи по рис. 18.1. Вращающий момент Та, Нм на ведущем звене можно вычислить по известным мощности Ра, кВт и частоте вращения па, мин -1
Тa = 9550 Ра/па.
Из условия равновесия имеем
Та + Ть + Тh = 0.
1 |
Ftb |
|
|
Fth |
Frb |
|
 Fra
Fra
 Fta
Fta
da
 dq
dq
3 |
180o |
2 |
nw
Рис. 18.3
Из условия сохранения энергии при установившемся движении следует
Т a ωa Tb ωb Th ωh 0
При ωb 0 имеем
Т a ωa Th ωh 0 и Т р Тa ωa / ωh Tauahb .
Или с учетом потерь ηbah при передаче движения от а к h.
Т h Т a Т р Тauahb ηbah
5

Условие равновесия запишем в виде
Тa Tb ( Tauahb ηbah )=0.
Отсюда Тb Ta (uahb ηbah -1).
Таким же образом можно получить
Tb Th 1 1/(uahb ηahb )
Так как ubah обычно велико, то вращающий момент на центральном колесе Ь мало отличается от момента на выходном валу: Tb≈-Th.
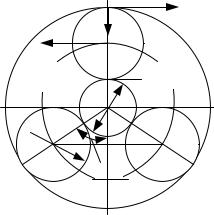
Силы в зацеплении
Окружные силы в зацеплении вычисляют по вращающим моментам (Нм) и делительным диаметрам da, db, dg (мм) зубчатых колес (для передач без смещения)
Fta 2 103 Ta kw /(da nw ), Fta 2 103Ta kw /(db nw ),
Fth 2 103 Th kw /[(da d g )nw ],
где nw – число сателлитов, kw – коэффициент, учитывающий неравномерность распределения момента между сателлитами (между потоками).
|
|
|
|
|
|
|
|
|
|
Номинальное положение |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шестерни |
|||||||||
0 |
|
Fta1 |
Fta1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Fs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ta3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fta2 |
|
Fta3 |
Fta 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Зубчатая муфта |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
a) |
|
|
|
б) |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Реальное положение |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r
в)
Рис. 18.4
На рис. 18.3 показаны силы, действующие на один из сателлитов. Радиальные силы Fra = Ftatgaw и Frb = Ftbtgaw здесь уравновешены.
В идеальном механизме kw = 1 и окружные силы на колесе а в зацеплении со всеми сателлитами одинаковы по величине: Fta1 = Fta2 = Fta3. Колесо а уравновешено (см. многоугольник сил на рис. 18.4, а). Однако в реальной передаче вследствие погрешностей изготовления и деформаций деталей под нагрузкой вращающий момент распределяется между сателлитами неравномерно, Fta1 ≠ Fla2 ≠ Fta3 и на вал центрального колеса действует уравновешивающая сила Fs (рис. 18.4, б). Значения коэффициента kw при этом существенно больше единицы. Для уменьшения неравномерности распределения момента и выравнивания окружных сил колесо а выполняют без опор –
6
«плавающим» и соединяют его с ведущим валом с помощью зубчатой муфты, позволяющей компенсировать возможные радиальные смещения r шестерни (рис. 18.4, в). В этом случае колесо а под действием силы Fs самоустанавливается, стремясь достичь равновесного положения, преодолевая действие сил трения и инерции. При этом значения коэффициента kw намного меньше: kw= 1,05 – 1,15.
Подбор чисел зубьев колес
В отличие от обычных зубчатых передач расчет планетарных передач начинают с подбора чисел зубьев. Рассмотрим последовательность подбора чисел зубьев на примере планетарной прямозубой передачи (рис. 18.1) без смещения.
Число зубьев za центральной шестерни а задают из условия не-
подрезания ножки зуба: za≥ 17. Принимают za = 24 при Н ≤ 350 НВ; za = 21
при 45HRC<H≤52HRC и za= 17 при Н>52 HRC.
Число зубьев zb, неподвижного центрального колеса b определяют по заданному передаточному отношению ubah из формулы (18.2)
z |
b |
z |
a |
(ub 1). |
|
|
|
ah |
|
||
Число зубьев zg сателлита g вычисляют из условия соосности, в соот- |
|||||
ветствии с которым межосевые расстояния aw |
зубчатых пар с внешним и |
||||
внутренним зацеплениями должны быть равны (рис. 18.1) |
|||||
aw=0,5(da+dg) = 0,5(db-dg), |
(18.3) |
||||
где d=mz– делительный диаметр соответствующего зубчатого колеса.
Так как модули зацеплений планетарной передачи одинаковы, то формула (18.3) принимает вид
zg=0,5(zb-za).
Полученные числа зубьев za, zg, и zb проверяют по условиям сборки и соседства.
Условие сборки требует, чтобы во всех зацеплениях центральных колес с сателлитами имело место совпадение зубьев со впадинами, в противном случае собрать передачу невозможно. Установлено, что при симметричном расположении сателлитов условие сборки удовлетворяется, когда сумма зубьев центральных колес (za + zb) кратна числу сателлитов nw (обычно nw =
3), т.е. (za + zb)/nw = целое число.
Условие соседства требует, чтобы сателлиты не задевали зубьями друг друга. Для этого необходимо, чтобы сумма радиусов вершин зубьев соседних сателлитов, равная dga = m(zg + 2), была меньше расстояния l между их осями
(см. рис. 18.3), т.е.
dga<l = 2awsim(1800/nw), |
(18.4) |
где aw = 0,5m(za + zg ) – межосевое расстояние.
7
Из формулы (18.4) следует, что условие соседства выполнено, когда
(zg 2)(za zg ) sin(1800 / nw ).
5. Расчет планетарных передач на прочность
Расчет на прочность планетарных передач ведут по формулам для обычных зубчатых передач. Расчет выполняют для каждого зацепления. Например, в передаче, изображенной на рис. 18.1, необходимо рассчитать внешнее зацепление колес а и g и внутреннее – колес g и b. Так как модули и силы в этих зацеплениях одинаковы, а внутреннее зацепление по своим свой-
ствам прочнее внешнего, то при одинаковых материалах колес достаточно рассчитать только внешнее зацепление.
Ниже остановимся только на особенностях расчета планетарных пере-
дач.
При определении допускаемых напряжений H , F коэффициенты долговечности ZN и YN находят по эквивалентным числам циклов нагружения NHE - μ HNk и NFE = μ FNk соответственно. А число Nk циклов перемены напряжений зубьев за весь срок службы вычисляют при вращении колес только относительно друг друга.
Для центральной шестерни
Nka 60nw na/ Lh ,
где nw – число сателлитов; Lh ≤ суммарное время работы передачи, ч; п'а = (па - nh) – относительная частота вращения центральной шестерни; па и nh – частоты вращения центральной шестерни и водила, мин -1.
По п'а вычисляют окружную скорость, в соответствии с которой назначают степень точности передачи и выбирают коэффициенты KHV, KFV.
Для сателлитов
Nkg=60n3n'gLh,
где n3– число нагружений зуба за один оборот сателлита; n'g = na/ za/zg – от-
носительная частота вращения сателлита.
Зуб сателлита за один оборот нагружается дважды: в зацеплениях с колесами а и b. Однако при определении числа циклов принимают пъ = 1, так как при расчете на контактную прочность учитывают, что зуб сателлита работает с колесами а и b разными боковыми сторонами, а при определении для зубьев сателлита допускаемых напряжений изгиба σ Fg вводят коэффициент А, учитывающий двухстороннее приложение нагрузки (симметричный цикл нагружения). Значения YA принимают: YA = 0,65; 0,75; 0,9 соответственно для улучшенных, закаленных ТВЧ (или цементованных) и азотированных сталей.
8

Межосевое расстояние планетарной прямозубой передачи для пары колес внешнего зацепления (центральной шестерни с сателлитом) определяют по формуле (15.3)
a |
|
450(u / 1)3 |
|
KH T1kw |
|
|
, |
||
w |
ψ |
|
u / |
2 |
n |
|
|||
|
|
|
|
|
|||||
|
|
|
ba |
w |
|||||
|
|
|
|
|
H |
|
|||
где и' = zg/za – передаточное число рассчитываемой пары колес; kw = 1,05 – 1,15 – коэффициент неравномерности распределения нагрузки между сателлитами; Т1 = Та – вращающий момент на валу центральной шестерни, Н-м; nw – число сателлитов; ψ ab – коэффициент ширины венца колеса.
Ширина bь центрального колеса b: bь = ψ ab . Ширину bg венца сателлита
принимают на 2 – 4 мм больше значения bь центральной шестерни – ba
=1,1bg.
Модуль зацепления
m =2aw//(zg + za).
Полученный расчетом модуль округляют до ближайшего стандартного значения, а затем уточняют межосевое расстояние aw =m(zg+zfl)/2.
Расчет на изгиб выполняют по формуле (15.4) для обычных зубчатых передач.
Контрольные вопросы
1.Какую зубчатую передачу называют планетарной? Ее устройство и принцип работы.
2.В каком случае передачу называют дифференциальной?
3.Каковы основные достоинства и недостатки планетарных передач по сравнению с обычными зубчатыми?
4.В каких областях машиностроения широко применяют планетарные передачи и почему?
5.Какой метод применяют при выводе формулы для определения передаточного отношения планетарной передачи?
6.В чем заключаются условия соосности, сборки и соседства планетарных передач? Почему расчет планетарных передач начинают с подбора чисел зубьев?
7.По какой частоте вращения вычисляют окружную скорость для назначения степени точности передачи и выбора коэффициентов КНУ и KFV?
8.Что учитывает коэффициент YA в формуле определения допускаемых напряжений изгиба для зубьев сателлита?
9.Почему в планетарном редукторе центральную шестерню выполняют плавающей?
9