

Детали машин / Konspekty_lekcii / Конспекты лекций / Лекция 19. Волновые передачи
.pdfЛекция 19 ВОЛНОВЫЕ ПЕРЕДАЧИ
План лекции
1.Устройство и принцип работы фрикционной волновой передачи.
2.Принцип работы волновой зубчатой передачи.
3.Передаточное отношение волновой зубчатой передачи.
4.Характер и причины отказов деталей волновых передач.
5.Расчет гибкого колеса на сопротивление усталости.
Волновой называют механическую передачу, в которой вращение передают за счет перемещения зоны деформации упругого гибкого звена. Механические волновые передачи могут быть фрикционными и зубчатыми.
1.Устройство и принцип работы фрикционной волновой передачи
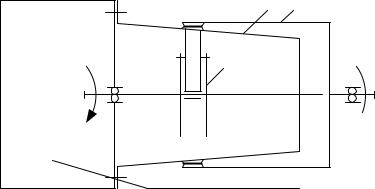
Основными элементами передачи являются (рис. 19.1, а – в):
1– гибкое колесо, представляющее собой тонкостенную оболочку в виде цилиндра с дном, соединенное с валом;
2– жесткое колесо, соединенное с корпусом;
h – генератор волн в виде двух роликов большого диаметра, расположенных на водиле, соединенный с быстроходным валом.
На практике встречаются и другие конструктивные исполнения основных элементов.
|
0 |
2 |
w |
1
2
d 1 d
w 0
a)
|
|
|
2 |
1 |
2 |
|
A |
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
1 |
h |
|
h |
|
1 |
|
1 |
|
|||
|
|
|
|||
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
h |
|
|
|
б) |
|
|
в) |
|
Рис. 19.1
На рис. 19.1, а показано относительное расположение недеформированного гибкого 1 и жесткого 2 колес. При этом d1 < d2; 2W0 = d2 - d1.
Устанавливая генератор h, деформируют гибкое колесо 1, придавая ему форму эллипса (рис. 19.1, б). Силовое взаимодействие деталей волновой передачи происходит в точках контакта на большой оси эллипса. Генератор прижимает гибкое колесо к жесткому с силой, достаточной для передачи нагрузки силами трения. При неподвижном жестком колесе вращение генератора вызывает обкатывание гибкого колеса по жесткому, и вращение его в противоположном вращению генератора направлении.
1

W 0
W
Гибкое колесо  до деформации
до деформации
Гибкое колесо  после деформации
после деформации
Рис. 19.2
Выделим на гибком колесе 1 точку А, находящуюся в контакте с жестким колесом 2. Через один оборот генератора h, вращающегося по направлению движения часовой стрелки, т. А на гибком колесе совместится с т. А на жестком колесе (рис. 19.1, б), так как длина окружности гибкого колеса диаметром d1 меньше длины окружности жесткого колеса диаметром d2. Следовательно, гибкое колесо вращается в направлении, противоположном направлению вращения генератора.
На рис. 19.2 показано гибкое колесо до деформирования (окружность) и после деформирования генератором (эллипс). Максимальную деформацию в направлении большой оси эллипса обозначают Wo .Текущее значение W деформации зависит от угла . Угол отсчитывают от большей оси эллипса в направлении движения часовой стрелки.
Зависимость W f ( ) представляет собой волновую функцию (рис. 19.3) На угле 2π укладывают две волны деформации. Такую передачу на-
зывают двухволновой.
W
W0 
0 |
|
|
2
Рис. 19.3
Зубчатая волновая передача
Гибкое колесо в такой передаче представляет собой тонкостенный цилиндр, на деформируемом конце которого выполнен зубчатый венец с наружными зубьями эвольвентного профиля. Жесткое колесо имеет зубья
2

внутреннего зацепления. Число зубьев z2 жесткого колеса больше числа зубьев z1 гибкого колеса. Генератор волн, представляющий собой водило, состоит из овального кулачка и напрессованного на него специального (гибкого) шарикоподшипника. Профиль кулачка выполняют эквидистантным к принятой форме деформирования гибкого колеса.
Гибкий подшипник – подшипник с тонкостенными кольцами, допускающий радиальную деформацию колец, соизмеримую с их толщиной, и обеспечивающий передачу вращательного движения при деформированных кольцах.
Такой генератор, называемый кулачковым, лучше других сохраняет заданную форму деформирования под нагрузкой.
При сборке в круглое гибкое колесо вставляют генератор волн, придающий колесу овальную форму, и вводят в зацепление с жестким колесом.
На рис. 19.4 штриховыми линиями показаны гибкое колесо и положение зубьев на нем до деформирования, сплошными линиями после деформирования. При деформировании гибкого колеса генератором под действием радиальных сил Fr зубья гибкого колеса перемещаются по радиусу и входят в зацепление с зубьями жесткого колеса в направлении большой оси эллипса. В направлении малой оси эллипса зубья гибкого колеса вследствие его деформации перемещаются к центру и выходят из зацепления с зубьями жесткого колеса.
Внаправлении большой оси эллипса зацепление зубьев гибкого колеса
сзубьями жесткого колеса происходит по всей высоте зуба.
Ft 

 F
F 






 Fr
Fr
F |
|
r |
Ft |
|
F
e
Рис. 19.4
При переходе от большой оси к малой зубья гибкого колеса постепенно выходят из зацепления. В одновременном зацеплении находится большое число зубьев: 25 – 40 % от числа зубьев гибкого колеса. Даже при небольшой нагрузке на каждый зуб передача может передавать значительный вращающий момент.
3
2. Принцип работы волновой зубчатой передачи
При повороте генератора на угол зуб гибкого колеса, перемещаясь в радиальном направлении на W, давит на зуб жесткого колеса силой F, направленной по нормали к контактирующим поверхностям (рис. 19.4). Силу F можно представить в виде составляющих сил: окружной Ft и радиальной Fr. На зуб гибкого колеса действуют реакции Ft / и Fr/ .
Если ведущим является генератор ( ωh 0 ), а жесткое колесо закреплено ( ω2 0 ), то под действием силы Ft / гибкое колесо вращается ( ω1 0 ) в
направлении, противоположном вращению генератора, на что, как мы увидим в дальнейшем, укажет знак минус в формуле передаточного отношения.
Если неподвижно гибкое колесо ( ω1 0 ), то под действием силы Ft жесткое колесо вращается ( ω2 0 ) в направлении вращения генератора ( ωh 0 ) – знак плюс в формуле передаточного отношения.
1 2
h
h 

 2
2
Герметизированное
пространство
Рис.19.5
На рис. 19.5 показана схема волновой передачи с неподвижным гибким колесом. Волновая передача – единственная механическая передача, которая может передавать вращение «через стенку» из герметизированного пространства в вакуум без применения подвижных уплотнений вращающихся деталей.
В волновой передаче каждый из трех основных элементов может быть ведущим. Так, например, при закрепленном гибком и повороте жесткого колеса против направления движения часовой стрелки гибкое колесо воздействует на генератор силой F'r (рис. 19.4). Линия действия силы F'r - по нормали к кривой, описывающей форму деформирования гибкого колеса. Под действием момента Т = 2F're (здесь 2 – число волн деформации) генератор вращается в направлении вращения жесткого колеса.
4
3. Передаточное отношение волновой зубчатой передачи
Как и планетарная, волновая передача имеет три основных звена, которые воспринимают внешние моменты. Любое основное звено может быть остановлено.
1. Остановлен генератор ( ωh 0 ). Вращение передается от гибкого колеса с числом зубьев z1 к жесткому (z2) – обычное внутреннее зацепление
u12h |
ω1 |
|
z2 |
. |
ω2 |
|
|||
|
|
z1 |
||
В формуле знак плюс, так как направления вращения ω1 и ω 2 совпа-
дают.
2. Остановлено жесткое колесо ( ω 2 =0 ). Это наиболее частый случай
(обычная волновая передача).
Рассмотрим дифференциальную волновую передачу со всеми тремя подвижными звеньями, имеющими угловые скорости ω1 , ω 2 , ω h . Выберем систему координат, неподвижно связанную с генератором. Для этого мысленно зададим всей системе угловую скорость (– ω h ). Тогда звенья будут иметь относительные угловые скорости:
ω1 ωh ; ω2 ωh ; ωh ωh 0 ,
т.е. относительно неподвижного генератора оба колеса будут казаться вращающимися.
Тогда, как и в первом случае, можем записать
u h |
|
ω1 ωh |
|
z2 |
|
|||
|
|
ω |
|
z . |
||||
12 |
|
ω |
2 |
h |
|
|||
|
|
|
|
1 |
|
|||
Если остановлено жесткое колесо, то движение передается от генератора к гибкому колесу, и, следовательно, нужно найти u12h ωh / ω1
Полагая в формуле для дифференциальной передачи ω 2 =0, имеем
ω1 ωh |
|
z2 |
; |
ω1 |
|
z2 |
; |
|||||
ω |
2 |
ω |
h |
z |
ω |
h |
z |
|||||
|
|
|
|
|||||||||
|
|
1 |
|
|
1 |
|
||||||
Знак минус показывает, что направление вращения гибкого колеса противоположно направлению вращения генератора.
3. Остановлено гибкое колесо ( ω1 =0). Вращение передается от генератора к жесткому колесу. Нужно найти uh21 ωh / ω2 .
Полагая в формуле для дифференцированной передачи ω1 =0, имеем
0 ωh |
|
|
z2 |
; |
|
- ωh / ω2 |
|
z2 |
; |
||||||
ω |
2 |
ω |
h |
z |
1 - ω |
h |
/ ω |
2 |
z |
||||||
|
|
|
|
||||||||||||
|
|
1 |
|
|
|
|
1 |
|
|||||||
5
|
ωh |
|
z2 |
|
z2 |
|
ωh |
; |
||
ω |
2 |
z |
z |
|
ω |
2 |
||||
|
|
1 |
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
z2 |
|
||||||
|
|
ωh |
|
z2 |
|
|
||||||||||||||
|
|
|
|
1 |
|
|
|
z1 |
; |
|||||||||||
|
|
|
ω2 |
|
|
z1 |
|
|
||||||||||||
|
ωh |
|
|
|
z2 / z1 |
|
. |
|||||||||||||
|
ω |
2 |
|
(z |
z |
2 |
) / z |
|||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u h |
|
ωh |
|
|
|
|
|
z2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
z . |
|||||||||||||
|
|
12 |
|
|
ω |
2 |
|
|
z |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
Направления вращения генератора и жесткого колеса совпадают. Разность чисел зубьев колес должна быть чкратна числу волн (как в планетарной передаче числу сателлитов)
(z2–zx)/nw=Kz,
где K2 – целое число; при и ≥ 70 Кz = 1; nw– число волн, для двухволновой передачи nw = 2.
Тогда z2 – z1 = 2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример. Вычислить передаточные отношения |
u 2 |
и u |
2 |
при z = 200 и |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
h1 |
|
|
h2 |
1 |
z2 = 202. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u h |
|
|
ωh |
|
|
|
z1 |
|
|
200 |
|
100 |
. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
12 |
|
|
ω1 |
|
|
|
z2 z1 |
|
|
202 200 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
u h |
|
ωh |
|
|
|
z2 |
|
|
200 |
|
101 |
. |
|
|
||
|
|
|
|
|
|
|
|
|
||||||||
12 |
|
|
ω2 |
|
|
|
z2 z1 |
|
|
202 200 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Связь радиальной деформации с передаточным отношением
Из рис. 19.1 следует: 2W0 = d2-d1. Для зубчатой волновой передачи с модулем т имеем
2W0 d 2 d1 m(z2 z1 ) .
Так как z2 – z1 = 2, то радиальная деформация Wo для колес, нарезанных без смещения исходного контура
W0 0,5 m 2 m .
Для обычной волновой передачи
6
u h |
|
|
|
z1 |
|
|
mz1 |
|
|
|
d1 |
|
|
d1 |
|
|
|
|
z |
|
|
mz |
|
|
d |
|
2W . |
||||||
12 |
|
z |
2 |
|
mz |
2 |
|
d |
2 |
1 |
|
|||||
|
|
|
1 |
|
|
1 |
|
|
|
|
0 |
|
||||
Иначе говоря, передаточное отношение в волновой передаче равно отношению радиуса ведомого колеса к разности радиусов жесткого и гибкого колес или к размеру деформирования Wo.
Отсюда следует, что большие значения передаточного отношения и могут быть достигнуты при малых значениях WOi т.е. при мелких модулях т. Меньшим значениям и соответствуют большие размеры деформирования Wo, при которых значительно возрастает кривизна гибкого колеса в зоне зацепления и, следовательно, напряжения изгиба.
Допускаемый диапазон передаточных отношений волновой передачи: 70 < и < 320.
Меньшие значения и ограничены прочностью гибкого колеса по напряжениям изгиба, большие минимальными значениями модуля (w>0,15 мм).
Достоинства волновых передач.
1.Возможность получения большого передаточного отношения в одной ступени при сравнительно высоком КПД. Для одной ступени и до 320
при КПД: η = 0,7 –0,9.
2.Способность передавать большие вращающие моменты при малых габаритах и массе, так как в зацеплении одновременно находится большое число зубьев.
3.Плавность работы, малая кинематическая погрешность вследствие двухзонности и многопарности зацепления.
4.Возможность передачи вращения из герметизированного пространства без применения уплотнения вращающихся деталей. 5. Малые нагрузки на валы и опоры вследствие симметричности конструкции. 6. Работа с меньшим шумом.
Недостатки.
1.Сложность изготовления тонкостенного гибкого колеса и генератора
волн.
2.При необходимости применения мелких модулей требуется специальное зубодолбежное оборудование.
3.Ограниченные частоты вращения генератора волн, возникновение вибрации.
Применение. Волновые передачи применяют в промышленных роботах и манипуляторах, в механизмах с большим передаточным отношением, а также в устройствах с повышенными требованиями к кинематической точности или к герметичности.
4.Характер и причины отказов деталей волновых передач
1.Разрушение гибкого колеса вследствие появления усталостных трещин во впадинах зубьев. Колесо подвержено воздействию знакопеременных напряжений изгиба.
7
2.Разрушение подшипников генератора волн вследствие действия сил
взацеплении и сопротивления гибкого колеса деформированию.
3.Проскок генератора волн (вращение вала генератора при невращающемся выходном вале) вследствие больших упругих деформаций генератора волн и жесткого колеса при передаче больших вращающих моментов.
4.Износ зубьев. Незначительное изнашивание зубьев обусловлено перекосом гибкого колеса, деформируемого с одного торца; прогрессирующее изнашивание – скольжением зубьев при вхождении в зацепление.
Материалом для гибких колес служат стали марок ЗОХГСА, 40X13, 40ХНМА. Для волновых редукторов общего назначения чаще других применяют сталь ЗОХГСА с термообработкой улучшение (Н = 280 –320 НВ), а зубчатый венец подвергают дробеструйному наклепу или азотированию
( σв =1100 МПа; σ -1 = 480–500 МПа). Термической обработке подвергают заготовку в виде толстой трубы. Азотирование и наклеп зубчатого венца выполняют после механической обработки и нарезания зубьев.
Жесткое колесо волновых передач по конструкции подобно колесам с внутренними зубьями обычных и планетарных передач. Характеризуется менее высоким напряженным состоянием, чем гибкое колесо. Изготовляют из обычных конструкционных сталей, например, марок 45 или 40Х.
5. Расчет гибкого колеса на сопротивление усталости
Рассмотрим элемент гибкого колеса толщиной h и длиной 1 (рис. 19.6) как часть кругового кольца с начальной кривизной r. После деформирования гибкого колеса генератором выделенный элемент получает приращение кривизны, которое можно представить в зависимости от изгибающего момента
М.
Как показывают экспериментальные исследования, прочность гиб-
кого колеса, в основном, зависит от напряжений, |
возникающих от действия |
||||||||
изгибающего момента M. |
|
|
|
|
|
|
|
|
|
Без учета влияния продольных Fp |
и поперечных сил Q общее диф- |
||||||||
ференциальное уравнение изогнутой оси кольца имеет вид |
|||||||||
1 |
d W |
|
M |
|
|||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
, |
(19.1) |
|
|
2 |
|
2 |
|
||||
|
r |
|
|
EJ |
|
||||
|
|
d |
|
|
|
||||
где левая часть – кривизна кольца после деформирования: W – радиальное перемещение; r = (D+h)/2 – радиус серединной поверхности до деформиро-
вания, – диаметр отверстия гибкого колеса; |
в правой части: М – изгибаю- |
||||||||
щий момент, E – модуль упругости материала колеса, J – момент инерции |
|||||||||
поперечного сечения |
|
|
|
|
|
|
|
|
|
J |
1h3 |
|
1h2 |
|
h |
Wи |
h |
, |
|
|
|
2 |
|
||||||
12 |
6 |
|
2 |
|
|||||
8

где Wи – момент сопротивления поперечного сечения изгибу.
Знак минус соответствует обозначению, принятому на рис. 19.6, где положительными считают изгибающие моменты, уменьшающие кривизну кольца.
Преобразуем правую часть уравнения (19.1)
M |
|
M |
|
σ F |
|
|
|
|
. |
||
EJ |
EWи (h / 2) |
Е(h / 2) |
|||
Решив теперь преобразованное уравнение (19.1) относительно напряжений изгиба F , получим
|
Eh |
|
2 |
|
|
|
|
d W |
|
||||
F |
|
|
|
|
|
W . |
2r |
2 |
|
2 |
|||
|
|
d |
|
|
||
Как видно, напряжение изгиба зависят от закона деформирования гибкого колеса. При деформировании по закону W=W0cos(2 ), близкому к эллипсу, имеем
F 2Ehr2 ( 4W0 cos(2 ) W0 cos(2 )) .
Отсюда следует, что напряжения изгиба переменны и достигают максимальных значений при = 0° и = 90°.
При = 0°
3 EhW0 ;
F 2 r2
при = 90°
F 3 EhW0 ; 2 r2
В общем случае можем записать
|
F |
A |
EhW0 , |
||
|
σ |
|
2 |
|
|
|
|
|
r |
|
|
где Aσ – коэффициент, зависящий |
от |
формы деформирования. В ча- |
|||
стности, для деформирования гибкого колеса кулачковым генератором с гибким подшипником Aσ = 1,75.
Характеристиками знакопеременного симметричного цикла изменения напряжений изгиба служат: амплитуда σ a σ F и среднее значение σ m = 0.
Реальное гибкое колесо отличает от гладкого кольца наличие зубчатого венца и растяжение под действием сил Fp. И то и другое приводит к увеличению действующих напряжений. Поэтому в расчетную зависимость вводят коэффициент Kσ , учитывающий влияние зубчатого венца и его растяжения на
9

прочность гибкого колеса ( Kσ = 1,5– 2,2, большие значения соответствуют
меньшим значениям модулей – меньшим значениям радиусов закруглений во впадинах между зубьями).
При установке генератор деформирует гибкое колесо только с одного торца. Под действием вращающего момента начальные форма и размер деформирования в реальной передаче изменяются. Это связано с выборкой радиальных зазоров в гибком подшипнике, зазоров между наружным кольцом подшипника и гибким колесом, с контактными деформациями в гибком подшипнике и деформациями жесткого колеса. Изменения начальной формы и размера деформирования приводят к увеличению действующих напряжений, что учитывают введением в расчетную формулу коэффициента
Kд=1,3–1,7.
Нагружение гибкого колеса вращающим моментом Т и перерезывающими силами Q, вызывающими действие касательных напряжений, учитывают введением в расчетную зависимость коэффициента K τ = 1,2–1,3.
Таким образом, формула для вычисления действующих эквивалентных напряжений в гибком колесе принимает вид
σF Aσ EhW0 Kσ Kд Kτ . r2
Коэффициент безопасности по усталостной прочности гибкого зубчатого венца рассчитывают по формуле
SF σ 1 / σa ,
где σ 1 – предел выносливости материала гибкого колеса. Условие прочности гибкого колеса (проверочный расчет)
SF SF
где SF 1,6...1,7 . Большие значения – для вероятности неразрушения
свыше 99 %.
При проектировочном расчете определяют диаметр D мм, отверстия гибкого колеса по критерию усталостной прочности гибкого венца
D 1053  T /(0,16σ 1
T /(0,16σ 1 
 u /(K S F )) ,
u /(K S F )) ,
где Т– вращающий момент на тихоходном валу, Н∙м; σ 1 – предел выносливости материала гибкого колеса, МПа; Kσ =1,5+0,0015u–эффективный ко-
эффициент концентрации напряжений; и - передаточное отношение; [s]F – коэффициент безопасности.
Диаметр D согласуют с наружным диаметром гибкого подшипника.
Расчет подшипника генератора волн. Особенностью работы волно-
вых генераторов является то, что они вращаются с высокой частотой входного звена, воспринимая большие нагрузки выходного звена. Оптимальным по нагрузочной способности является кулачковый генератор волн. Требуемую
10