

Детали машин / Konspekty_lekcii / Конспекты лекций / Лекция 4. Механические передачи
.pdfЛекция 4. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
План лекции
1.Назначение и функции передач в машинах.
2.Кинематический расчет привода.
3.Режимы нагружения машин.
1. Назначение и функции передач в машинах
Привод (машины, механизма) – система взаимосвязанных устройств, предназначенная для приведения в движение одной или нескольких частей машины.
Если частота вращения вала рабочего органа машины совпадает с частотой вращения вала двигателя, движение непосредственно передается от двигателя к рабочему органу. Чаще всего эти частоты не совпадают. В этих случаях для изменения скорости и направления движения устанавливают между двигателем и рабочим органом механические передачи: закрытые – редукторы и открытые. Это могут быть зубчатые цилиндрические и конические, червячные, ременные, цепные и т. д. передачи.
Для соединения валов двигателя, редуктора и рабочего органа машины в привод устанавливают муфты.
Проектирование привода начинают с анализа его кинематической схемы. При разработке кинематической схемы необходимо учитывать следующие особенности:
–при выборе частоты вращения электродвигателя надо иметь в виду, что чем быстроходнее электродвигатель, тем меньше его размеры, масса, стоимость
ивыше КПД. Но с увеличением частоты вращения возрастает общее передаточное отношение привода, что в свою очередь неизбежно ведет к увеличению габаритов, массы и стоимости механических передач или к усложнению самой кинематической схемы;
–при разбивке общего передаточного отношения между ступенями для получения более компактной конструкции привода предпочтительно назначать для закрытых передач большее передаточное отношение, чем для открытых.
Кинематический и силовой расчеты привода включают:
–по заданным параметрам выходного вала рабочей машины подбор электродвигателя;
–определение кинематических параметров проектируемого привода;
–определение силовых параметров проектируемого привода.
Редукторы механизмы, используемые для понижения угловых скоростей и увеличения крутящих моментов, выполненные в виде отдельного агрегата.
Коробка передач, transmission box, gear transmission, fixed-ratio tr.-v" sion –
механизм, в котором ступенчатое изменение передаточного отношения
1

осуществляется при переключении зубчатых передач, размещенных в отдельном корпусе [коробке].
2.Кинематический расчет привода
1)Определение требуемой мощности двигателя
P |
T ω |
= |
F |
|
Рвых |
, |
(1.1) |
|
|
|
|||||
тр |
ηобщ |
|
ηобщ |
|
ηобщ |
|
|
|
|
|
|
||||
где Т вращающий момент на выходном валу, (Н м); ω угловая скорость выходного вала (рад/с);
F усилие на выходном барабане (Н);
окружная скорость на выходном барабане, (м/с);
ηобщ общий КПД привода;
ηобщ = η1 η2 η3 ….. ηк .
Существует методика более точного определения КПД цилиндрических передач.
2). Выбор электродвигателя Мощность электродвигателя, подбираемого для проектирования привода,
должна быть не ниже той, которая определена по формуле (1.1). Из существующих двигателей выбирают преимущественно асинхронные двигатели трехфазного тока единой серии 4А. Причем низкооборотные двигатели имеют большую массу и габариты, высокооборотные – требуют большого передаточного числа, рекомендуется выбирать двигатели синхронной частотой вращения nс = 1 500, 1 000 об/мин.
На рис. 1. представлена характеристика асинхронного двигателя трехфазного тока, выражающая зависимость частоты вращения n (об/мин) вала двигателя от величины вращающего момента Т (Н м). По оси абсцисс отложены значения Тном – номинального вращающего момента, Тпуск – пускового или начального вращающего момента, развиваемого при пуске двигателя, Тmax – максимального кратковременного момента; по оси ординат отложены значения частот вращения: номинальной nном, критической nкр и синхронной nс, развиваемой при отсутствии нагрузки и равной частоте вращения магнитного поля; она зависит от частоты тока f и числа пар полюсов р:
60 f nc p ;
Соответствующая угловая скорость, рад/с,
ω |
|
|
2πf |
. |
c |
|
|||
|
|
p |
||
|
|
|
||
|
2 |
|
|
|

При стандартной частоте тока f = 50 с-1 и числе пар полюсов р = 1…6 синхронная частота вращения nc будет равна соответственно 3 000; 1 500; 1 000; 750; 600 и 500 об/мин. Для приводов, разрабатываемых в курсовых проекта, рекомендуется выбирать двигатель с числом полюсов не более восьми, а лучше - не более шести, т. е. с p 3 и nc 1000об/мин.
Рис. 1. Характеристика асинхронного двигателя трехфазного тока
При возрастании нагрузки частота вращения вала двигателя уменьшается вследствие скольжения s , определяемого по формуле
s nc n , nc
откуда
n nc (1 s). |
(1.2) |
При пуске двигателя Т = Тпуск (или Тнач), s = 1 и n = 0; при номинальном режиме Т = Тном s = 0,02…0,05; nном (0,98…0,95)nс; при отсутствии нагрузки
Т = 0 s = 0; n = nс.
Электродвигатели АИР (взаимозаменяемые с серией А, 5А, 5АМ, 4А, 4АМ, АД) - унифицированная серия асинхронных электродвигателей. Серия АИР охватывает диапазон мощностей от 0,06 до 315 кВт. Здесь рассмотрены 17 габаритов двигателей АИР, характеризуемых значениями высоты оси вращения от 50 до 355 мм и частотами вращения 3000, 1500, 1000, 750, 600 об/мин.
Структура серии предусматривает следующие группы исполнения электродвигателей АИР:
1- основное;
2- модификации по условиям окружающей среды (тропическое, химически стойкое, для сельского хозяйства);
3- по точности установочных размеров (высокой точности и повышенной точности);
3

4 - с дополнительными устройствами (с фазным ротором, со встроенным электромагнитным тормозом), с повышенным пусковым моментом, с повышенным скольжением, многоскоростные, узкоспециальные (для судовых механизмов, для привода моноблочных насосов, рудничное исполнение, для привода безсальниковых компрессоров и др.).
Асинхронные двигатели основного исполнения предназначены для работы от сети переменного тока частоты 50 Гц и изготовляются на номинальные напряжения, указанные в таблице 1.1.
Таблица 1.1
Номинальные напряжения и мощности работы электродвигателей
Номинальное |
220,380 |
220, 380, 660 |
220/380, 380/660 |
|
напряжение, В |
||||
|
|
|
||
|
|
|
|
|
Мощность, кВА |
0,06-0,37 |
0,55-11,0 |
15,0-315 |
|
|
|
|
|
Структура условного обозначения электродвигателей АИР
АИ ХХ ХХХ Х Х Х Х ХХ
А - асинхронный электродвигатель; И - унифицированная серия (И - Интерэлектро);
Х- Привязка мощностей к установочно-присоединительным размерам (Р -
по РС 3031 -71, С - по CENELEK док. 28/64);
Х– Р – с повышенным пусковым моментом, С – с повышенным скольжением;
XXX - габарит, мм;
Х- установочный размер по длине станины (S,M,L);
Х- длина сердечника статора (А или В, отсутствие буквы – означает только одну длину сердечника – первую);
Х- число полюсов: 2, 4, 6, 8;
X - дополнительные буквы для модификаций электродвигателя (Б - со встроенной температурной защитой; П - с повышенной точностью по установочным размерам; Х2 - химически стойкие; С - сельскохозяйственные);
XX - климатическое исполнение электродвигателя (У, Т, ХЛ) и категория размещения (1, 2, 3, 4, 5).
Конструктивное исполнение.
Электродвигатели асинхронные АИР изготовляются в чугунном исполнении (станина и щиты из чугуна) и в алюминиевом исполнении (станина из алюминиевого сплава, щиты из чугуна). Конструктивные исполнения и способ монтажа по ГОСТ 2479-79.
Структура условного обозначения
4

По способу монтажа электродвигатели АИР изготавливаются в исполнении (1-я цифра):
IМ1 - на лапах с подшипниковыми щитами;
IМ2 - на лапах с подшипниковыми щитами и фланцем со стороны привода; IМЗ - без лап с подшипниковыми щитами и фланцем со стороны привода. Исполнения по способу монтажа (2 и 3-я цифры) приведены в таблице 1.2.
Таблица 1.2
Исполнение по способу монтажа
5
Условные обозначения концов вала (4-я цифра):
1 - электродвигатель с одним цилиндрическим концом вала;
2 - электродвигатель c двумя цилиндрическими концами вала. Конструкция электродвигателей АИР обеспечивает их функционирование
и сохранение технических параметров с заданной надежностью в течение заданного срока службы, а также удобство и безопасность монтажа и эксплуатации.
Условия эксплуатации электродвигателей АИР
Температура окружающей среды от минус 40°С до плюс 40°С. Относительная влажность воздуха при температуре плюс 25°С - до 98% для исполнения У2, У1.
Запыленность воздуха для двигателей со степенью защиты IР44 не более 10 мг/м3, IР23 не более 2 мг/м3. Окружающая среда не взрывоопасная, не содержащая токопроводящей пыли, агрессивных газов и паров в концентрациях, разрушающих металл и изоляцию (кроме химически стойкого исполнения).
Среднее значение уровня звука на расстоянии 1 м от корпуса двигателя основного исполнения на холостом ходу составляет от 51 до 85 дБА в зависимости от габарита (50-250 мм) и синхронной частоты вращения.
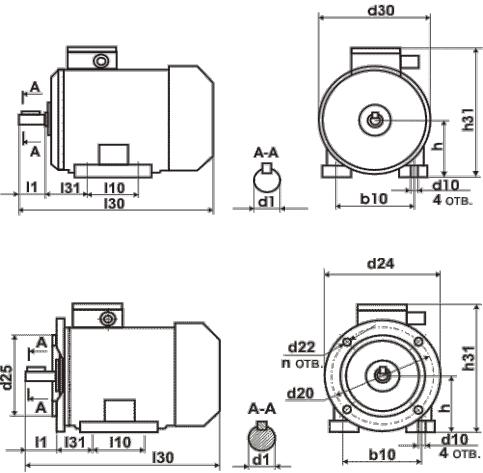
Габаритный чертеж электродвигателя АИР IM1081
Габаритный чертеж электродвигателя АИР 2081
Рис. 2.Габаритные размеры электродвигателей
6
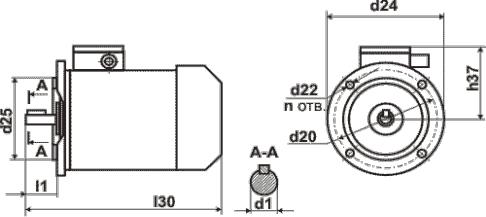
Габаритный чертеж электродвигателя АИР IM3081
Рис. 3.Габаритные размеры электродвигателей
Технические данные асинхронных электродвигателей единой серии АИР в закрытом обдуваемом исполнении приведены в таблице 1.3.
|
|
|
|
|
|
|
Таблица 1.3 |
|
|
|
Основные технические характеристики |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Номинальная |
|
|
Отношение |
Отношение |
|
Мощн., |
|
Масса, |
КПД, |
Коэфф. |
максим. |
|
||
Тип |
частота вращ., |
пускового |
|
|||||
кВт |
|
кг |
об/мин |
% |
мощн. |
момента к номин. |
момента к |
|
|
|
|
|
|
номин. |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
3000 об/мин (2 полюса) |
|
|
|
||
|
|
|
|
|
|
|
|
|
0,55 |
АИР 63В2 |
6,1 |
2730 |
75 |
0,85 |
2,2 |
2,2 |
|
0,75 |
A71A2 |
8,7 |
2815 |
74,0 |
0,83 |
2,5 |
2,7 |
|
1,1 |
A71B2 |
10,5 |
2800 |
77,0 |
0,86 |
2,6 |
2,8 |
|
|
|
|
|
|
|
|
|
|
1,5 |
A80A2 |
13 |
2835 |
79,0 |
0,87 |
2,8 |
3,0 |
|
2,2 |
A80B2 |
15 |
2820 |
82,0 |
0,87 |
3,2 |
3,4 |
|
|
|
|
|
|
|
|
|
|
3,0 |
A90L2 |
17 |
2835 |
82,0 |
0,86 |
2,9 |
3,2 |
|
4,0 |
A100S2 |
20,5 |
2820 |
82,0 |
0,84 |
3,0 |
3,2 |
|
|
|
|
|
|
|
|
|
|
5,5 |
A100L2 |
28 |
2860 |
84,0 |
0,86 |
1,8 |
2,2 |
|
7,5 |
A112M2 |
49 |
2895 |
87,0 |
0,89 |
2,5 |
3,2 |
|
|
|
|
|
|
|
|
|
|
11,0 |
A132M2 |
54 |
2890 |
88,0 |
0,88 |
2,8 |
3,5 |
|
15,0 |
АИР160S2 |
116 |
2940 |
88,0 |
0,86 |
2,0 |
3,2 |
|
|
|
|
|
|
|
|
|
|
18,5 |
АИР160М2 |
130 |
2940 |
90,0 |
0,88 |
2,0 |
3,2 |
|
22,0 |
A180S2 |
150 |
2940 |
90,5 |
0,89 |
2,1 |
3,5 |
|
|
|
|
|
|
|
|
|
|
30,0 |
A180M2 |
170 |
2940 |
92,0 |
0,89 |
2,2 |
3,5 |
|
|
|
|
1500 об/мин (4 полюса) |
|
|
|
||
0,55 |
A71A4 |
8,5 |
1410 |
70,0 |
0,78 |
1,7 |
2,0 |
|
0,75 |
A71B4 |
10 |
1415 |
73,0 |
0,74 |
2,0 |
2,5 |
|
1,1 |
A80A4 |
14 |
1420 |
77,0 |
0,80 |
2,3 |
2,6 |
|
|
|
|
|
|
|
|
|
|
1,5 |
A80B4 |
16 |
1420 |
78,5 |
0,80 |
2,3 |
2,8 |
|
2,2 |
A90L4 |
17 |
1390 |
78,0 |
0,82 |
2,2 |
2,6 |
|
|
|
|
|
|
|
|
|
|
3,0 |
A100S4 |
21 |
1395 |
78,0 |
0,80 |
2,7 |
3,0 |
|
4,0 |
A100L4 |
30 |
1425 |
84,0 |
0,82 |
2,5 |
3,0 |
|
|
|
|
|
|
|
|
|
|
7

|
|
|
|
|
|
|
Окончание таб. 1.3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Номинальная |
|
|
Отношение |
|
Отношение |
|
Мощн., |
|
Масса, |
КПД, |
Коэфф. |
|
максим. |
|
||
Тип |
частота вращ., |
пускового |
|
|
|||||
кВт |
|
кг |
об/мин |
% |
мощн. |
момента к номин. |
момента к |
|
|
|
|
|
|
|
номин. |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5,5 |
A112M4 |
45 |
1450 |
87,0 |
0,85 |
2,4 |
|
3,0 |
|
|
|
|
|
|
|
|
|
|
|
7,5 |
A132S4 |
52 |
1455 |
88,0 |
0,83 |
2,8 |
|
3,2 |
|
11,0 |
A132M4 |
60 |
1440 |
88,0 |
0,84 |
2,8 |
|
3,3 |
|
|
|
|
|
|
|
|
|
|
|
15,0 |
АИР160S4 |
120 |
1460 |
89,0 |
0,87 |
1,9 |
|
2,9 |
|
18,5 |
АИР160M4 |
142 |
1460 |
90,0 |
0,89 |
1,9 |
|
2,9 |
|
|
|
|
|
|
|
|
|
|
|
22,0 |
А180S4 |
160 |
1460 |
91,0 |
0,88 |
2,1 |
|
2,8 |
|
30,0 |
А180M4 |
190 |
1460 |
91,0 |
0,89 |
2,4 |
|
3,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1000 об/мин (6 полюсов) |
|
|
|
|
||
0,75 |
A80A6 |
14 |
930 |
71,0 |
0,70 |
2,0 |
|
2,4 |
|
|
|
|
|
|
|
|
|
|
|
1,1 |
A80B6 |
16 |
930 |
72,0 |
0,72 |
2,0 |
|
2,4 |
|
1,5 |
A90L6 |
18 |
925 |
72,0 |
0,71 |
2,4 |
|
2,8 |
|
|
|
|
|
|
|
|
|
|
|
2,2 |
A100L6 |
24 |
925 |
76,0 |
0,71 |
2,9 |
|
3,1 |
|
|
|
|
|
|
|
|
|
|
|
3,0 |
A112MA6 |
41 |
960 |
83,0 |
0,79 |
2,2 |
|
2,6 |
|
|
|
|
|
|
|
|
|
|
|
4,0 |
A112MB6 |
50 |
960 |
84,0 |
0,80 |
2,2 |
|
2,6 |
|
|
|
|
|
|
|
|
|
|
|
5,5 |
A132S6 |
56 |
950 |
83,0 |
0,82 |
2,2 |
|
2,5 |
|
|
|
|
|
|
|
|
|
|
|
7,5 |
A132M6 |
61 |
960 |
84,5 |
0,77 |
2,8 |
|
3,1 |
|
|
|
|
|
|
|
|
|
|
|
11,0 |
АИР160S6 |
125 |
970 |
87,0 |
0,82 |
1,9 |
|
2,9 |
|
15,0 |
АИР160М6 |
155 |
970 |
89,0 |
0,82 |
2,3 |
|
3,0 |
|
|
|
|
|
|
|
|
|
|
|
18,5 |
А180M6 |
160 |
970 |
89,0 |
0,86 |
2,2 |
|
3,0 |
|
22,0 |
A200M6 |
195 |
970 |
87,0 |
0,84 |
2,0 |
|
2,5 |
|
|
|
|
|
|
|
|
|
|
|
30,0 |
A200L6 |
240 |
970 |
89,5 |
0,86 |
2,0 |
|
2,7 |
|
|
|
|
750 об/мин (8 полюсов) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
0,75 |
A90LA8 |
23 |
705 |
67,0 |
0,60 |
2,0 |
|
2,3 |
|
|
|
|
|
|
|
|
|
|
|
1,1 |
A90LB8 |
28 |
705 |
72,0 |
0,68 |
2,0 |
|
2,4 |
|
1,5 |
A100L8 |
33,5 |
705 |
75,0 |
0,71 |
2,2 |
|
2,5 |
|
|
|
|
|
|
|
|
|
|
|
2,2 |
A112MA8 |
46 |
705 |
75,0 |
0,75 |
1,7 |
|
2,3 |
|
3,0 |
A112MB8 |
53 |
700 |
78,0 |
0,73 |
1,7 |
|
2,3 |
|
|
|
|
|
|
|
|
|
|
|
4,0 |
A132S8 |
70 |
710 |
79,0 |
0,76 |
1,6 |
|
1,9 |
|
5,5 |
A132M8 |
86 |
710 |
80,0 |
0,76 |
1,7 |
|
2,1 |
|
7,5 |
АИР160S8 |
125 |
730 |
86,0 |
0,73 |
1,8 |
|
2,4 |
|
11,0 |
АИР160M8 |
150 |
730 |
87,0 |
0,75 |
1,8 |
|
2,4 |
|
15,0 |
А180M8 |
172 |
730 |
86,5 |
0,76 |
2,0 |
|
2,7 |
|
|
|
|
|
|
|
|
|
|
|
18,5 |
A200M8 |
210 |
730 |
88,0 |
0,80 |
2,1 |
|
2,5 |
|
22,0 |
A200L8 |
225 |
730 |
88,5 |
0,77 |
2,0 |
|
2,5 |
|
|
|
|
|
|
|
|
|
|
|
30,0 |
A225M8 |
316 |
730 |
90,0 |
0,79 |
2,0 |
|
3,0 |
|
3. Режимы нагружения машин
На основе статистической обработки реальных режимов нагружения множества машин в качестве расчетных принять шесть типовых режимов нагружения.
0 – постоянный (насосные и силовые станции;
8

I – тяжелый (горные машины); |
|
|
|
|
|
||||
|
|
|
|
|
|
||||
II – средний равновероятностный |
|
(транспортные машины) |
|
||||||
III – средний нормальный |
|
|
|||||||
|
|
|
|
|
|
||||
IY легкий |
|
(универсальные металлорежущие станки) |
|||||||
Y – особо легкий |
|||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Таблица 1.4 |
||
Ориентировочные значения КПД передач* и элементов привода |
|||||||||
|
|
|
|
|
|
|
|||
Передача и элемент привода |
|
Закрытая |
|
Открытая |
|||||
Цилиндрическая зубчатая передача |
|
0,95…0,98 |
|
0,92…0,94 |
|||||
Коническая зубчатая передача |
|
|
|
0,94…0,97 |
|
0,91…0,93 |
|||
Червячная передача с числом заходов червяка z1 |
|
|
|
|
|
||||
|
z = 1 |
|
|
|
0,68…0,72 |
|
0,52…0,62 |
||
|
z = 2 |
|
|
|
0,73…0,78 |
|
0,62…0,72 |
||
|
z = 4 |
|
|
|
0,78…0,84 |
|
|
|
|
Цепная передача |
|
|
|
|
0,94…0,96 |
|
0,90…0,92 |
||
Ременная передача |
|
|
|
|
|
|
|
|
|
|
– клиновая |
|
– |
|
0,93…0,95 |
||||
|
– плоская |
|
|
|
|
|
0,94…0,96 |
||
Подшипники качения (одна пара) |
|
|
|
0,990…0,995 |
|||||
Подшипники скольжения (одна пара) |
|
|
|
|
|
||||
|
– жидкостного трения |
|
0,990…0,995 |
||||||
|
– полужидкостного трения |
|
0,975…0,985 |
||||||
Муфты |
|
|
|
|
|
0,98…0,99 |
|||
КПД передач представлены без учета КПД подшипников.
Таблица 1.5
Рекомендуемые значения передаточных чисел u одноступенчатых передач
Вид передачи |
Передаточное число |
|
||
рекомендуемое |
|
max |
||
|
|
|||
Закрытая цилиндрическая |
|
|
|
|
– быстроходная |
3,15…5,6 |
|
8,0 |
|
– тихоходная |
2,5…4,0 |
|
6,3 |
|
– шевронная |
3,15…5,6 |
|
8,0 |
|
Закрытая коническая |
1,0…4,0 |
|
6,3 |
|
Открытая |
|
|
|
|
– цилиндрическая |
4,0…7,0 |
|
12 |
|
– коническая |
3,15…5,6 |
|
6,3 |
|
Червячная с числом заходов червяка |
|
|
|
|
z1=1 |
28…50 |
|
80 |
|
z1=2 |
14…40 |
|
60 |
|
z1=4 |
8,0…30 |
|
40 |
|
Клиноременная |
2,0…3,0 |
|
5,0 |
|
Плоскоременная |
2,0…3,0 |
|
5,0 |
|
Цепная |
1,5…3,0 |
|
4,0 |
|
|
|
|
|
|
Пример. Номинальная частота вращения с учетом скольжения (S =4,7 )
9
nном = nс (1 S) = 1 500 (1 0,047) = 143 об/мин
nном = nс (1 S) = 1 000 (1 0,051) = 943 об/мин.
При возрастании нагрузки частота вращения вала двигателя снижается вследствие скольжения (S).
Определение общего передаточного числа и разбивка его по ступеням.
i |
|
|
nном |
; |
|
общ |
|
|
|||
|
|
nвых |
|
||
|
|
|
|
||
iобщ i1 i2 i3.......... |
iк. |
||||
Разбивка общего передаточного числа привода по отдельным передачам производится исходя из средних передаточных значений передаточных чисел
(табл. 1.5)
Контрольные вопросы.
1.Что называется приводом (редуктором, коробкой передач)?
2.Перечислите основные этапы проектирования привода.
3.Как производится кинематический расчет привода?
4.Как производиться выбор электродвигателя? Какими параметрами характеризуется работа электродвигателя?
5.Какая существует классификация асинхронных двигателей?
6.В чем отличие синхронной частоты двигателя от номинальной?
7.Как производиться определение передаточного числа привода и разбивка передаточного числа?
10